Linux设备驱动(三)—— 块设备驱动
块设备驱动
在前一章,我们具体的介绍了简单字符设备驱动的编写,在具体的工程中,需要考虑的比我们写的复杂得多,还要考虑电源管理,以及定时器的一些东西。
这一章,我们会介绍linux三种设备驱动中的块设备驱动。块设备与字符设备有很大的不同。
字符设备与块设备I/O操作的不同如下:
1)块设备只能以块为单位接受输入和返回输出,而字符设备则是以字节为单位;大多数的设备是字符设备,因为他们不需要缓冲而且不易固定块大小进行操作;
2)块设备对于I/O请求有对应的缓冲区,因此他们可以选择以什么顺序进行响应,字符设备无需缓冲且被直接读写;
对于存储设备而言,调整读写的顺序作用巨大,因为读写连续的扇区比分离的扇区更快。
3)字符设备只能被顺序读写,而块设备可以随机访问。虽然块设备可以随机访问,但是对于磁盘这类机械设备设备而言,顺序的组织块设备的访问可以提高性能。
linux块设备驱动的结构
分析主要的数据结构、函数及其关系
1. 分析主要的结构体
1.1. block_device_operations结构体
在块设备驱动中,有一个类似于字符设备驱动中file_operations结构体的block_device_operations结构体,它对应块设备操作的集合,定义如下:
struct block_device_operations
{
int(*open)(struct inode *, struct file*); //打开
int(*release)(struct inode *, struct file*); //释放
int(*ioctl)(struct inode *, struct file *, unsigned, unsigned long); //ioctl
long(*unlocked_ioctl)(struct file *, unsigned, unsigned long);
long(*compat_ioctl)(struct file *, unsigned, unsigned long);
int(*direct_access)(struct block_device *, sector_t, unsigned long*);
int(*media_changed)(struct gendisk*); //介质被改变?
int(*revalidate_disk)(struct gendisk*); //使介质有效
int(*getgeo)(struct block_device *, struct hd_geometry*);//填充驱动器信息
struct module *owner; //模块拥有者
};
- 1.打开和释放
int (*open)(struct inode *inode, struct file *filp);
int (*release)(struct inode *inode, struct file *filp);
//与字符设备驱动类似,当设备被打开和关闭时将调用它们
- 2.IO 控制
int (*ioctl)(struct inode *inode, struct file *filp, unsigned int cmd,unsigned long arg);
//上述函数是ioctl()系统调用的实现,块设备包含大量的标准请求,这些标准请求由Linux 块设备层处理,因此大部分块设备驱动的ioctl()函数相当短。
- 3.介质改变
int (*media_changed) (struct gendisk *gd);
//被内核调用来检查是否驱动器中的介质已经改变,如果是,则返回一个非0 值,否则返回0。这个函数仅适用于支持可移动介质的驱动器,通常需要在驱动中增加一个表示介质状态是否改变的标志变量,非可移动设备的驱动不需要实现这个方法。
- 4.使介质有效
int (*revalidate_disk) (struct gendisk *gd);
//revalidate_disk()函数被调用来响应一个介质改变,它给驱动一个机会来进行必要的工作以使新介质准备好。
- 5.获得驱动器信息
int (*getgeo)(struct block_device *, struct hd_geometry *);
//该函数根据驱动器的几何信息填充一个hd_geometry 结构体,hd_geometry 结构体包含磁头、扇区、柱面等信息。
- 6.模块指针
struct module *owner;
//一个指向拥有这个结构体的模块的指针,它通常被初始化为THIS_MODULE。
1.2. gendisk结构体
在Linux内核中,使用gendisk(通用磁盘)结构体表示一个独立的磁盘设备(或者分区),结构体定义如下:
struct gendisk {
int major; //设备的主设备号,和register_blkdev()中的major相同
int first_minor; //起始次设备号,dengyu0,则表示次设备是从0开始的
int minors; //分区(次设备)的数量,当使用alloc_disk()时,就会自动设置该成员
char disk_name[32]; //块设备名称,和register_blkdev()中的name相同
struct hd_struct **part; //分区表的信息
int part_uevent_suppress;
struct block_device_operations *fops; //块设备操作函数的集合
struct request_queue *queue; //请求队列,用于管理该设备IO请求队列的指针
void *private_data; //私有数据
sector_t capacity; //扇区数,512字节为一个扇区,描述的是设备的容量
...
};
1.3. request申请结构体
struct request{
struct list_head queuelist; //用于挂载请求队列链表的节点,使用函数elv_next_request()访问他,而不能直接访问
struct list_head donelist; //用于挂载已完成的请求链表的节点
struct request_queue *q; //指向请求队列
unsigned int cmd_flags; //命令标识
enum rq_cmd_type_bits cmd_type; //读写命令标志,为0(READ)表示为读,为1(WRITE)表示为写
sector_t sector; //要提交的下一个扇区的偏移位置(offset)
...
unsigned int current_nr_sectors; //当前需要传送的扇区数(长度)
...
char *buffer; //当前请求队列链表的申请里面的数据,用来读写扇区数据(源地址)
...
}
2.函数
2.1. 块设备的创建
int register_blkdev(unsigned int major, const char *name);
//创建一个块设备,
- 参数1:主设备号,可以通过内核传参获得(已知主设备好的情况下)当major==0时,表示动态创建(即,系统分配设备号),创建成功会返回一个主设备号
- 参数2:块设备名
2.2.块设备的卸载
unregister_blkdev(unsigned int major, const char *name);
- 参数1:创建设备室返回的主设备号
- 参数2:块设备名
2.3.分配一个gendisk结构体
struct gendisk *alloc_disk(int minor);
- 参数:minors,分区数,如果是1则表示不分区
2.4.释放gendisk结构体
void del_gendisk(struct gendisk *disk);
- 参数:分配结构体时返回的gendisk结构体
2.5.分配一个request_queue请求队列
request_queue_t *blk_init_queue(request_fn_proc *rfn, spinlock_t *lock);
- 参数1:request_fn_proc结构体,用来执行放置在队列中的请求的处理函数(xxx_request)
- 参数2:lock,队列访问权限的自旋锁(spinlock),该所通过DEFINE_SPINLOCK定义
request_queue_t * blk_alloc_ueue(int gfd_mask);
- 使用这个函数来分配请求队列的时候,应该使用blk_queue_make_request()函数来绑定请求队列和“制造函数”(xxx_make_request)
2.6.清楚内核中的request_queue请求队列,在出口函数中使用
void blk_cleanup_queue(request_queue_t *q);
- 参数:上面分配的request_queue申请队列
2.7.定义自旋锁
static DEFINE_SPINLOCK(spinlock_t lock);
2.8.设置gendisk结构体的扇区数(成员copacity),size等于扇区数
static inline void set_capacity(struct gendisk *disk, sector_t size);
- 该函数具体实现的功能就是:
disk->capacity = size
2.9.分配了结构体之后,就要把它注册到内核中
void add_disk(struct gendisk *gd);
2.10.注销内核中的gendisk结构体,在出口函数中使用
void put_disk(struct gendisk *disk);
2.11.通过电梯算法获取申请队列中未完成的申请
struct request *elv_next_request(request_queue_t *q);
获取成功返回一个request结构体,不成功返回NULL
2.12.停止获取时,结束获取申请
void end_request(struct request *req, int uptodate);
结束获取申请,当uptodate=0时,表示该申请读写扇区失败,uptodate=1,表示读写成功
2.13.分配一段静态内存
static inline void *kzalloc(size_t size, gfp_t flags);
用来当做我们的磁盘扇区用,分配成功返回缓存地址,分配失败会返回0
2.14.注销一段静态内存,与kzalloc()相对应,在出口函数中使用
void kfree(const void *block);
2.15.获取request申请结构体的命令标志(cmd_flags成员),当返回READ(0)表示读扇区命令,否则为写扇区命令
rq_data_dir(rq);
2.16.扇区尺寸设置,告知内核块设备硬件扇区的大小,所有由内核产生的请求都是这个大小的倍数,并且正正确对界
void blk_queue_hardsect_size(request_queue_t *queue, unsigned short max);
参数1:申请队列
参数2:扇区大小
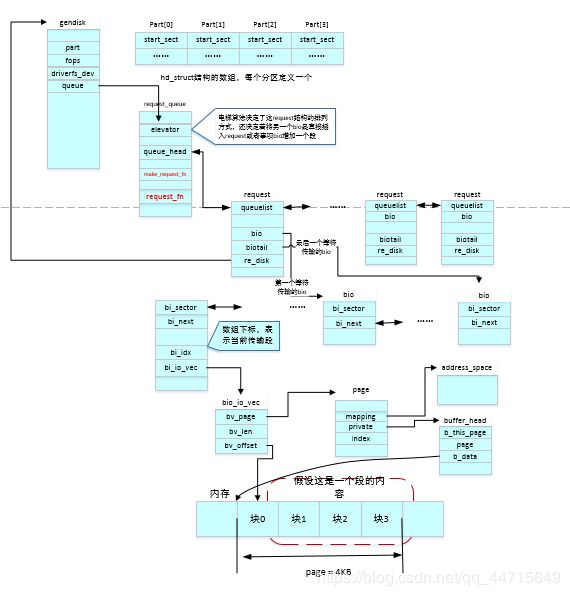
request_queue、request、bio和bio_vec之间的关系
块设备驱动程序流程
1. 在入口函数中
1)使用register_blkdev()创建一个块设备
2)blk_init_queue()使用分配一个申请队列,并赋申请队列处理函数
3)使用alloc_disk()分配一个gendisk结构体
4)设置gendisk结构体成员
4.1)设置成员函数(major、first_minor、disk_name、fops)
4.2)设置queue成员,等于之前分配的申请队列
4.3)通过set_capacity()设置capacity成员,等于扇区数
5)使用kzalloc()来获取缓存地址,用作扇区
6)使用add_disk()注册gendisk结构体
2. 在申请队列的处理函数中(会在分配申请队列的使用)
1)在while()循环中使用elv_next_request()获取申请队列中的每个未处理的函数
2)使用rq_data_dir()来获取每个申请的读写命令标志,为0(READ)表示读,为1(WRITE)表示写
3)使用memcp()来读或者写扇区(缓存)
4)使用end_request()来结束获取的每个申请
3. 在出口函数中
1)使用put_disk()和del_gendisk()来注销,释放gendisk结构体
2)使用kfree()释放磁盘扇区缓存
3)使用blk_cleanup_queue()清除内存中的申请队列
4)使用unregister_blkdev()卸载块设备
程序ramdisk_driver.c
#include