Python计算机视觉 多视图几何——基础矩阵
一、基础矩阵原理
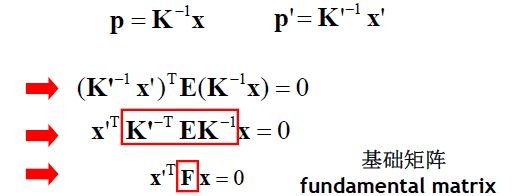
基础矩阵,存在这么一个矩阵F,使得空间中不在两图像平面上的任意点X分别在两图像的投影坐标x,x’满足等式(x’)TFx=0,即x’的转置乘以F,再乘以x的结果为0,那么F就是左边图像到右边图像的基本矩阵,从公式上可以看出基本矩阵是有方向的,右图到左图的基本矩阵就是F的转置。其中,矩阵F为3乘3的矩阵,秩为2。
(PS.转置: 如果 F 是表述点对 (x, x’)之间的基础矩阵, 则 FT 是表述点对 (x’,x)之间的基础矩阵。)
基础矩阵是对极几何的代数表达方式,可以看做是将点投影(转换)为直线,将左影像上的一个点投影到右影像上形成一条核线。
原理
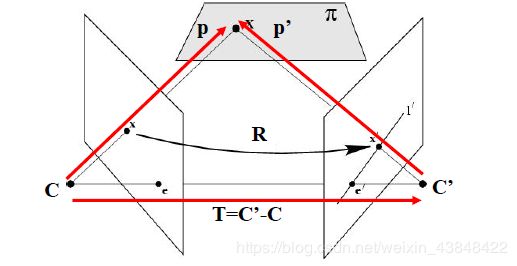
设X在C,C’坐标系中的相对坐标分别为P,P’,则有

根据三线共面,有
![]()
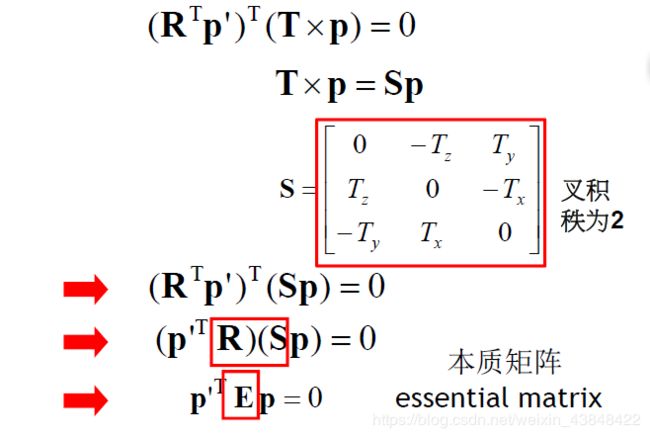
(PS:本质矩阵描述了空间中的点在两个坐标系中的坐标对应关系)
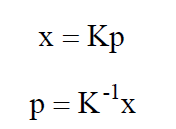
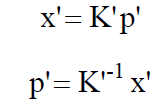
根据前述,K和K’分别为两个相机的内参矩阵,有:
(PS:基础矩阵描述; 空间中的点在两个相平面中的坐标对应关系)
应用
1.简化匹配
2.去除错配特征
二、代码实现
代码实现:
#!/usr/bin/env python
# coding: utf-8
# In[1]:
from PIL import Image
from numpy import *
from pylab import *
import numpy as np
from imp import reload
# In[2]:
import importlib
from PCV.geometry import camera
from PCV.geometry import homography
from PCV.geometry import sfm
from PCV.localdescriptors import sift
camera = importlib.reload(camera)
homography = importlib.reload(homography)
sfm = importlib.reload(sfm)
sift =importlib.reload(sift)
# In[3]:
# Read features
im1 = array(Image.open('image5/1.jpg'))
sift.process_image('image5/1.jpg', 'im1.sift')
l1, d1 = sift.read_features_from_file('im1.sift')
im2 = array(Image.open('image5/2.jpg'))
sift.process_image('image5/2.jpg', 'im2.sift')
l2, d2 = sift.read_features_from_file('im2.sift')
# In[9]:
matches = sift.match_twosided(d1, d2)
# In[10]:
ndx = matches.nonzero()[0]
x1 = homography.make_homog(l1[ndx, :2].T)
ndx2 = [int(matches[i]) for i in ndx]
x2 = homography.make_homog(l2[ndx2, :2].T)
x1n = x1.copy()
x2n = x2.copy()
# In[11]:
print (len(ndx))
# In[12]:
figure(figsize=(16,16))
sift.plot_matches(im1, im2, l1, l2, matches, True)
show()
# In[13]:
# Chapter 5 Exercise 1
# Don't use K1, and K2
#def F_from_ransac(x1, x2, model, maxiter=5000, match_threshold=1e-6):
def F_from_ransac(x1, x2, model, maxiter=5000, match_threshold=1e-6):
""" Robust estimation of a fundamental matrix F from point
correspondences using RANSAC (ransac.py from
http://www.scipy.org/Cookbook/RANSAC).
input: x1, x2 (3*n arrays) points in hom. coordinates. """
from PCV.tools import ransac
data = np.vstack((x1, x2))
d = 20 # 20 is the original
# compute F and return with inlier index
F, ransac_data = ransac.ransac(data.T, model,8, maxiter, match_threshold, d, return_all=True)
return F, ransac_data['inliers']
# In[15]:
# find E through RANSAC
model = sfm.RansacModel()
F, inliers = F_from_ransac(x1n, x2n, model, maxiter=5000, match_threshold=1e-3)
# In[16]:
print (len(x1n[0]))
print (len(inliers))
# In[17]:
P1 = array([[1, 0, 0, 0], [0, 1, 0, 0], [0, 0, 1, 0]])
P2 = sfm.compute_P_from_fundamental(F)
# In[18]:
# triangulate inliers and remove points not in front of both cameras
X = sfm.triangulate(x1n[:, inliers], x2n[:, inliers], P1, P2)
# In[19]:
# plot the projection of X
cam1 = camera.Camera(P1)
cam2 = camera.Camera(P2)
x1p = cam1.project(X)
x2p = cam2.project(X)
# In[20]:
figure()
imshow(im1)
gray()
plot(x1p[0], x1p[1], 'o')
#plot(x1[0], x1[1], 'r.')
axis('off')
figure()
imshow(im2)
gray()
plot(x2p[0], x2p[1], 'o')
#plot(x2[0], x2[1], 'r.')
axis('off')
show()
# In[21]:
figure(figsize=(16, 16))
im3 = sift.appendimages(im1, im2)
im3 = vstack((im3, im3))
imshow(im3)
cols1 = im1.shape[1]
rows1 = im1.shape[0]
for i in range(len(x1p[0])):
if (0<= x1p[0][i]0: #plot([locs1[i][0],locs2[m][0]+cols1],[locs1[i][1],locs2[m][1]],'c')
p1 = array([l1[i][0], l1[i][1], 1])
p2 = array([l2[m][0], l2[m][1], 1])
# Use Sampson distance as error
Fx1 = dot(F, p1)
Fx2 = dot(F, p2)
denom = Fx1[0]**2 + Fx1[1]**2 + Fx2[0]**2 + Fx2[1]**2
e = (dot(p1.T, dot(F, p2)))**2 / denom
x1e.append([p1[0], p1[1]])
x2e.append([p2[0], p2[1]])
ers.append(e)
x1e = array(x1e)
x2e = array(x2e)
ers = array(ers)
# In[24]:
indices = np.argsort(ers)
x1s = x1e[indices]
x2s = x2e[indices]
ers = ers[indices]
x1s = x1s[:20]
x2s = x2s[:20]
# In[25]:
figure(figsize=(16, 16))
im3 = sift.appendimages(im1, im2)
im3 = vstack((im3, im3))
imshow(im3)
cols1 = im1.shape[1]
rows1 = im1.shape[0]
for i in range(len(x1s)):
if (0<= x1s[i][0] 实验结果:
室外:
sift特征匹配结果

得到的基础矩阵

恢复这些点的三维位置


修改特征匹配结果后

室内:
在室内实验中,换了好几组图片就都只出现了sift特征匹配的实现,后续的恢复这些点的三维位置和修改特征匹配结果后都没有出现

小结
在实现室外实验的时候,只匹配一组照片就成功得到结果,而在实现室内实验时,匹配了好几组照片都没有实现修改特征匹配后的结果,都只是停留在了sift特征匹配的实现。个人理解,在室内拍摄出来的照片景深落差比较小,影响了特征点的匹配和三维点的恢复,导致结果无法实现。