synchronized
现在看来synchronized的效率很低,但是确实其他并发容器的基础,所以还是很值得学的。
1. synchronized的应用
在java代码中使用synchronized可是使用在代码块和方法中,根据synchronized用的位置可以有这些使用场景:

当多个线程访问被synchronized的方法或者代码块时会进行同步
其中,如果被锁的的对象时Class对象,那么通过该Class对象所实例化的实例对象也是被锁的
当线程无法获取该对象的锁时,就不能访问该对象的其他synchronized方法,但是可以访问非synchronized修饰的方法
synchronized保证了原子性和可见性
2. synchronized实现原理
先写一个简单的demo:
public class SychroDemo {
public static void main(String[] args) {
synchronized(SychroDemo.class) {
}
}
public static synchronized void method() {
}
}
反编译生成的class文件如下:
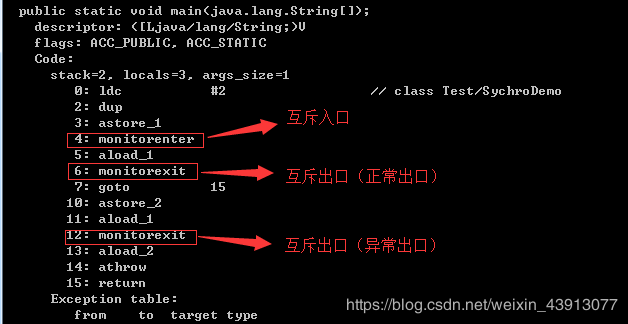
对代码块添加synchronized关键字后会出现上面的monitorenter和monitorexit

对放过添加synchronized会添加ACC_SYNCHRONIZED的flag标志
对象锁(monitor)机制
使用Synchronized进行同步,其关键就是必须要对对象的监视器monitor进行获取,当线程获取monitor后才能继续往下执行,否则就只能等待。而这个获取的过程是互斥的,即同一时刻只有一个线程能够获取到monitor。其中每一个对象都有一个monitor
线程获取monitor的模型:

synchronized的happens-before关系
synchronized对应的是happens-before的 监视器锁规则:对同一个监视器的解锁happens-before于对该监视器的加锁。
public class MonitorDemo {
private int a = 0;
public synchronized void writer() { // 1
a++; // 2
} // 3
public synchronized void reader() { // 4
int i = a; // 5
} // 6
}
该代码的happens-before关系如图所示:

在图中每一个箭头连接的两个节点就代表之间的happens-before关系,黑色的是通过程序顺序规则推导出来,红色的为监视器锁规则推导而出:线程A释放锁happens-before线程B加锁,蓝色的则是通过程序顺序规则和监视器锁规则推测出来happens-before关系,通过传递性规则进一步推导的happens-before关系。
现在我们来重点关注2 happens-before 5,通过这个关系我们可以得出什么?
根据happens-before的定义中的一条:如果A happens-before B,则A的执行结果对B可见,并且A的执行顺序先于B。线程A先对共享变量A进行加一,由2 happens-before 5关系可知线程A的执行结果对线程B可见即线程B所读取到的a的值为1。
3. synchronized优化
现在我们知道synchronized是获取对象的monitor,然后一次只能一个线程执行同步代码,如果我们不能改变同时时间执行同步代码的线程,那么我们能不能加快获取monitor的速度?答案是肯定的。
在聊到锁的优化也就是锁的几种状态前,有两个知识点需要先关注:(1)CAS操作 (2)Java对象头,这是理解下面知识的前提条件。
1.CAS操作
唤醒和阻塞线程会非常消耗时间,而CAS就没有阻塞
CAS是一种乐观锁操作,假设所有线程访问共享资源的时候不会出现冲突,既然不会出现冲突自然而然就不会阻塞其他线程的操作。因此,线程就不会出现阻塞停顿的状态。那么,如果出现冲突了怎么办?无锁操作是使用CAS(compare and swap)又叫做比较交换来鉴别线程是否出现冲突,出现冲突就重试当前操作直到没有冲突为止。
CAS的交换过程:
可以通俗的理解为CAS(V,O,N)包含三个值分别为:V 内存地址存放的实际值;O 预期的值(旧值);N 更新的新值。
当V和O相同时,也就是说旧值和内存中实际的值相同表明该值没有被其他线程更改过,即该旧值O就是目前来说最新的值了,自然而然可以将新值N赋值给V。反之,V和O不相同,表明该值已经被其他线程改过了则该旧值O不是最新版本的值了,所以不能将新值N赋给V,返回V即可。当多个线程使用CAS操作一个变量是,只有一个线程会成功,并成功更新,其余会失败。失败的线程会重新尝试,当然也可以选择挂起线程
CAS的实现需要硬件指令集的支撑,在JDK1.5后虚拟机才可以使用处理器提供的CMPXCHG指令实现。
旧Synchronized VS CAS
元老级的Synchronized(未优化前)最主要的问题是:在存在线程竞争的情况下会出现线程阻塞和唤醒锁带来的性能问题,因为这是一种互斥同步(阻塞同步)。而CAS并不是武断的间线程挂起,当CAS操作失败后会进行一定的尝试,而非进行耗时的挂起唤醒的操作,因此也叫做非阻塞同步。这是两者主要的区别。
CAS的应用场景
在J.U.C包中利用CAS实现类有很多,可以说是支撑起整个concurrency包的实现,在Lock实现中会有CAS改变state变量,在atomic包中的实现类也几乎都是用CAS实现(以后再说)。
CAS的问题
-
ABA问题
因为CAS会检查旧值有没有变化,这里存在这样一个有意思的问题。比如一个旧值A变为了成B,然后再变成A,刚好在做CAS时检查发现旧值并没有变化依然为A,但是实际上的确发生了变化。解决方案可以沿袭数据库中常用的乐观锁方式,添加一个版本号可以解决。原来的变化路径A->B->A就变成了1A->2B->3C。java这么优秀的语言,当然在java 1.5后的atomic包中提供了AtomicStampedReference来解决ABA问题,解决思路就是这样的。 -
自旋时间过长
使用CAS时非阻塞同步,也就是说不会将线程挂起,会自旋(无非就是一个死循环)进行下一次尝试,如果这里自旋时间过长对性能是很大的消耗。如果JVM能支持处理器提供的pause指令,那么在效率上会有一定的提升。 -
只能保证一个共享变量的原子操作
当对一个共享变量执行操作时CAS能保证其原子性,如果对多个共享变量进行操作,CAS就不能保证其原子性。有一个解决方案是利用对象整合多个共享变量,即一个类中的成员变量就是这几个共享变量。然后将这个对象做CAS操作就可以保证其原子性。atomic中提供了AtomicReference来保证引用对象之间的原子性。
2. Java对象头
在同步的时候是获取对象的monitor,即获取到对象的锁。那么对象的锁怎么理解?无非就是类似对对象的一个标志,那么这个标志就是存放在Java对象的对象头。

对象头的结构:

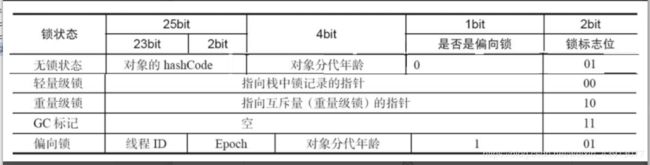
对象头的Mark Word结构

如图在Mark Word会默认存放hasdcode,年龄值以及锁标志位等信息。
从Java SE 1.6中,锁一共有4种状态,级别从低到高依次是:无锁状态、偏向锁状态、轻量级锁状态和重量级锁状态 ,这几个状态会随着竞争情况逐渐升级。锁可以升级但不能降级,意味着偏向锁升级成轻量级锁后不能降级成偏向锁。这种锁升级却不能降级的策略,目的是为了提高获得锁和释放锁的效率。对象的MarkWord变化为下图:
偏向锁
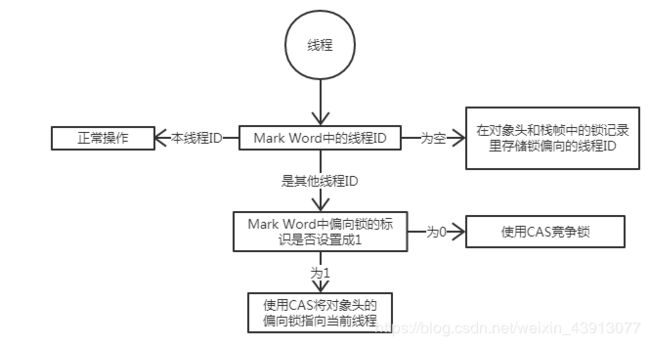
偏向锁的获取:
偏向锁的撤销:
偏向锁使用了一种等到竞争出现才释放锁 的机制,所以当其他线程尝试竞争偏向锁时,持有偏向锁的线程才会释放锁。
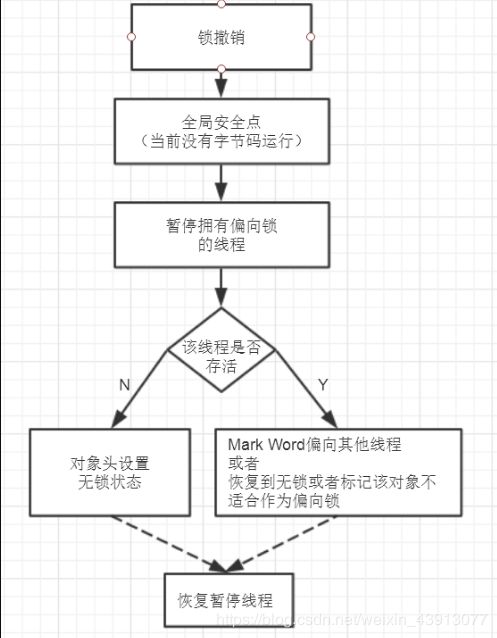
如图,偏向锁的撤销,需要等待全局安全点(在这个时间点上没有正在执行的字节码)。它会首先暂停拥有偏向锁的线程,然后检查持有偏向锁的线程是否活着,如果线程不处于活动状态,则将对象头设置成无锁状态;如果线程仍然活着,拥有偏向锁的栈会被执行,遍历偏向对象的锁记录,栈中的锁记录和对象头的Mark Word要么重新偏向于其他线程,要么恢复到无锁或者标记对象不适合作为偏向锁,最后唤醒暂停的线程。

jvm设置偏向锁
偏向锁在Java 6和Java 7里是默认启用的,但是它在应用程序启动几秒钟之后才激活
JVM参数来关闭延迟:-XX:BiasedLockingStartupDelay=0
JVM参数关闭偏向锁:-XX:-UseBiasedLocking=false(适用于程序里所有的锁通常情况下处于竞争状态,那么程序默认会进入轻量级锁状态)
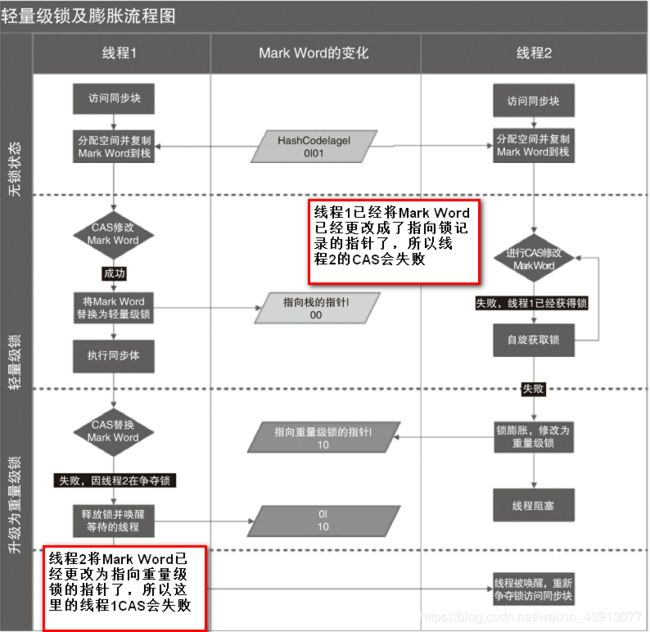
轻量级锁
加锁:
线程在执行同步块之前,JVM会先在当前线程的栈桢中创建用于存储锁记录的空间,并将对象头中的Mark Word复制到锁记录中,官方称为Displaced Mark Word。然后线程尝试使用CAS将对象头中的Mark Word替换为指向锁记录的指针。如果成功,当前线程获得锁,如果失败,表示其他线程竞争锁,当前线程便尝试使用自旋来获取锁
解锁:
轻量级解锁时,会使用原子的CAS操作将Displaced Mark Word替换回到对象头,如果成功,则表示没有竞争发生。如果失败,表示当前锁存在竞争,锁就会膨胀成重量级锁。
各种锁的比较

推荐链接:https://processon.com/view/5c25db87e4b016324f447c95