I2C
I2C时序
-
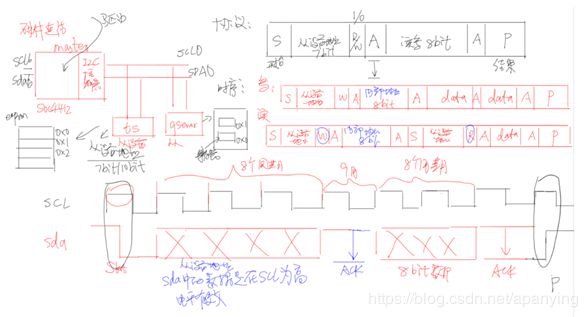
I2C是一种接口,硬件连接是通过SDA和SCL两条线,传输的时候遵从I2C协议。
-
上图中:master主设备,由soc担当。SCL提供时钟,SDA提供数据。
-
驱动是站在master角度读写设备的。所有的I2C从设备都在一条线上,每个从设备都有自己的从设备地址。当主设备需要访问从设备的时候,发送从设备地址。
-
在scl为高电平时,SDA由高电平向低电平跳变,表示开始发送数据。发送8个bit,七个bit数据,最后一位为读写位。
-
第九个周期的时候,SDA拉高,从设备回应ACK,把电平拉低表示回应。每次读写完成之后多有一个Ack表示是否读写成功。
-
在scl为高电平时,SDA由低电平向高电平跳变,表示结束发送数据。
-
设备接口,要遵循协议。读写是1/0表示。每个周期传递一个数据。
-
在scl为高电平的时候sda数据才有效,
I2C驱动框架
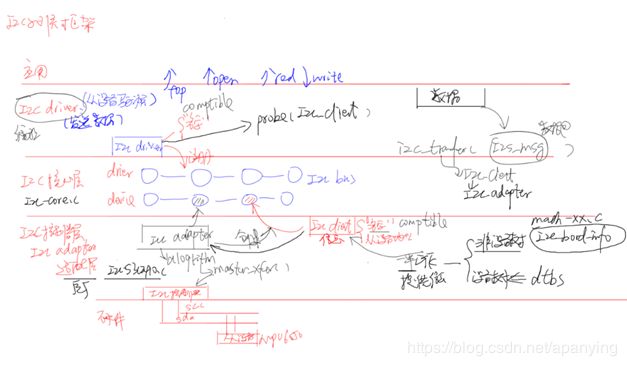
图中I2C client(其实就是device)不是自己创建的,I2C driver才是自己创建的
i2c子系统软件框架
应用
------------------------------------------
i2c driver:从设备驱动层
需要和应用层进行交互
封包数据,不知道数据是如何写入到硬件
------------------------------------------
i2c 核心层:维护i2c 总线,包括i2c driver, i2c client链表
drivers/i2c/i2c-core.c
---------------------------------------------------
i2c adapter层:i2c控制层,初始化i2c控制器 (有个算法maste-xfer())
完成将数据写入或读取-从设备硬件
不知道数据具体是什么,但是知道如何操作从设备
drivers/i2c/busses/i2c-s3c2410.c
我们只需要编写I2C_driver和I2C_client
确保i2c core和i2c adatper层必须编译进内核:需要对内核进行配置
make menuconfig
Device Drivers --->
-*- I2C support ---> //编译i2c-core.c
I2C Hardware Bus support --->
<*> S3C2410 I2C Driver // i2c-s3c2410.c
/sys/bus/i2c/
/sys/bus/i2c/devices/i2c-0
[root@farsight i2c-0]# cat name
s3c2410-i2c
- inux I2C从设备的设备树信息的添加
SOC中不一定有一组I2C接口,4412中有9组,通过查电路图,可以看到MPU6050接到第五组上边,有第0组开始。
i2c控制器地址
0x1386_0000,
0x1387_0000,
0x1388_0000,
0x1389_0000,
0x138A_0000,
0x138B_0000, ------ MPU6050
0x138C_0000,
0x138D_0000,
0x138E_0000
MPU6050: 从设备地
址是0x68
soc GPB_2— I2C_SCL5
GPB_3— I2C_SDA5
GPX3_3— GYRO_INT //确定设备什么时候动了。
在内核中默认就有了i2c0--13860000.i2c
模板:
控制器对应的设备树:arch/arm/boot/dts/exynos4.dtsi
i2c_0: i2c@13860000 {
#address-cells = <1>;
#size-cells = <0>;
compatible = "samsung,s3c2440-i2c";
reg = <0x13860000 0x100>;
interrupts = <0 58 0>;
clocks = <&clock 317>;
clock-names = "i2c";
pinctrl-names = "default";
pinctrl-0 = <&i2c0_bus>;
status = "disabled";
};
i2c_5: i2c@138B0000 {
#address-cells = <1>;
#size-cells = <0>;
compatible = "samsung,s3c2440-i2c";
reg = <0x138B0000 0x100>;
interrupts = <0 63 0>;
clocks = <&clock 322>;
clock-names = "i2c";
status = "disabled";
};
描述从设备信息的设备树的模板
arch/arm/boot/dts/exynos4412-fs4412.dts
i2c@13860000 {
#address-cells = <1>;
#size-cells = <0>;
samsung,i2c-sda-delay = <100>;
samsung,i2c-max-bus-freq = <20000>;
pinctrl-0 = <&i2c0_bus>;
pinctrl-names = "default";
status = "okay";
s5m8767_pmic@66 {
compatible = "samsung,s5m8767-pmic";
reg = <0x66>;
}
}
新增加i2c从设备,arch/arm/boot/dts/exynos4412-fs4412.dts增加i2c5控制和它包含的从设备设备
i2c@138B0000 {/*i2c adapter5信息*/
#address-cells = <1>;
#size-cells = <0>;
samsung,i2c-sda-delay = <100>;
samsung,i2c-max-bus-freq = <20000>;
pinctrl-0 = <&i2c5_bus>;
pinctrl-names = "default";
status = "okay";
mpu6050@68 { /*i2c client信息*/
compatible = "invensense,mpu6050";
reg = <0x68>;
};
};
保存后make dtbs
cp -raf arch/arm/boot/dts/exynos4412-fs4412.dtb /tftpboot/
I2Cdriver驱动的编写:
a, 添加i2c client的信息,必须包含在控制器对应的节点中
b,直接编写i2c driver
1,构建i2c driver,并注册到i2c总线
2,实现probe:
|
申请设备号,实现fops
创建设备文件
通过i2c的接口去初始化i2c从设备
几个常用的对象:
1.struct i2c_driver {//表示是一个从设备的驱动对象
int (*probe)(struct i2c_client *, const struct i2c_device_id *);
int (*remove)(struct i2c_client *);
struct device_driver driver; //继承了父类
|
const struct of_device_id *of_match_table;//of开头的,一般都表示设备树中的。
const struct i2c_device_id *id_table;//用于做比对,非设备树的情况
}
注册和注销
int i2c_add_driver( struct i2c_driver *driver);
void i2c_del_driver(struct i2c_driver *);
2.struct i2c_client {//描述一个从设备的信息,不需要在代码中创建,因为是由i2c adapter帮我们创建
unsigned short addr; //从设备地址,来自于设备树中
char name[I2C_NAME_SIZE]; //用于和i2c driver进行匹配,来自于设备树中compatible
struct i2c_adapter *adapter;//指向当前从设备所存在的i2c adapter,属于哪个总线中
struct device dev; // 继承了父类
};
创建i2c client的函数
struct i2c_client *i2c_new_device(struct i2c_adapter *adap, struct i2c_board_info const *info)
3.struct i2c_adapter {//描述一个i2c控制器,也不是我们要构建,原厂的代码会帮我们构建
const struct i2c_algorithm *algo; //算法
|
int (*master_xfer)(struct i2c_adapter *adap, struct i2c_msg *msgs,int num);
struct device dev; //继承了父类,也会被加入到i2c bus
int nr; //编号
}
注册和注销:
int i2c_add_adapter(struct i2c_adapter * adapter);
void i2c_del_adapter(struct i2c_adapter * adap);
4.struct i2c_msg {//描述一个从设备要发送的数据的数据包
__u16 addr; //从设备地址,发送给那个从设备
__u16 flags; //读1还是写0
__u16 len; //发送数据的长度
__u8 *buf; //指向数据的指针
};
//写从设备
int i2c_master_send(const struct i2c_client * client,const char * buf,int count)
//读从设备
int i2c_master_recv(const struct i2c_client * client,char * buf,int count)
以上两个函数都调用了:
int i2c_transfer(struct i2c_adapter *adap, struct i2c_msg *msgs, int num)
- mpu6050的I2Cdriver驱动框架编写
#include