STM32F7QSPI学习笔记——读写N25Q128
一、QSPI接口介绍
QUADSPI 是一种专用的通信接口,连接单、双或四(条数据线)SPI Flash 存储介质。该接口可以在以下三种模式下工作:
间接模式:使用 QUADSPI 寄存器执行全部操作,支持对FALSH进行读、写、擦除、锁定等操作。
状态轮询模式:周期性读取外部 Flash 状态寄存器,而且标志位置 1 时会产生中断(如擦除或烧写完成,会产生中断)
内存映射模式:外部 Flash 映射到微控制器地址空间,从而系统将其视作内部存储器
-
采用双闪存模式时,将同时访问两个 Quad-SPI Flash,吞吐量和容量均可提高二倍。
-
内存映射模式支持XIP,即可以将代码放在外部FLASH运行,缺点就是有延迟,没有内部运行速度快,且外部FALSH只能读,不能写入或擦除。
-
内存映射模式下QUADSPI 外设若没有正确配置并使能,禁止访问 QUADSPI Flash 的存储区域。即使 Flash 容量更大,寻址空间也无法超过 256MB。
二、 STM32QSPI 功能框图

STM32F7系列支持双QSPI接口,可以接两个外部FLASH,本文只介绍接一个FALSH的情况。QSPI使用6根线通信,其中数据线4根,1根时钟线,1根片选线,但是程序里是可以配置工作在几线模式。
三、QUADSPI 命令序列
QUADSPI 通过命令与 Flash 通信 每条命令包括指令、地址、交替字节、空指令和数据这五
个阶段,任一阶段均可跳过,但至少要包含指令、地址、交替字节或数据阶段之一。
nCS 在每条指令开始前下降,在每条指令完成后再次上升。
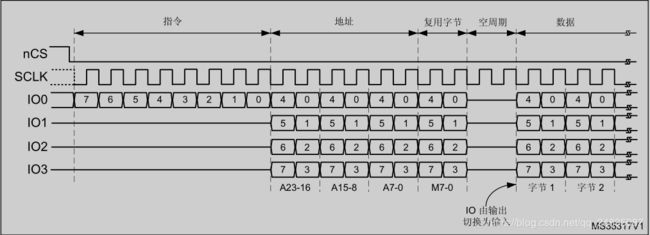
上图清晰的展示了一次QSPI通信过程,它完整的包含了通信的5个阶段,但不是每次通信都需要包含这5个阶段.
交替字节阶段,将 1-4 字节发送到 Flash,一般用于控制操作模式。|正常读写是不需要的,所以这个阶段可以省略(结构体中该参数置0);
空指令周期阶段,给定的 1-31 个周期内不发送或接收任何数据,目的是当采用更高
的时钟频率时,给 Flash 留出准备数据阶段的时间。
若 DummyCycles为零,则跳过空指令周期阶段,命令序列直接进入数据阶段(如果存在)。
此外,并不是每次通信都需要包含以上各个阶段,例如,打开写使能指令,只有指令阶段,其他阶段的参数都置0.再比如,读芯片ID,只有指令和数据阶段,具体包含哪些阶段需要参照芯片手册配置。
四、QUADSPI 信号接口协议模式
下面提到的几线模式都是指数据线的根数
单线 SPI 模式(即普通SPI通信,等同于使用MISO、MOSI、CLK、CS方式通信):
传统 SPI 模式允许串行发送/接收单独的 1 位。在此模式下,数据通过 SO 信号(其 I/O 与
IO0 共享)发送到 Flash。从 Flash 接收到的数据通过 SI(其 I/O 与 IO1 共享)送达。
通过将(QUADSPI_CCR 中的)IMODE/ADMODE/ABMODE/DMODE 字段设置为 01,可
对不同的命令阶段分别进行配置,以使用此单个位模式。
在每个已配置为单线模式的阶段中:
IO0 (SO) 处于输出模式
IO1 (SI) 处于输入模式(高阻抗)
IO2 处于输出模式并强制置“0”(以禁止“写保护”功能)
IO3 处于输出模式并强制置“1”(以禁止“保持”功能)
双线 SPI 模式:
在双线模式下,通过 IO0/IO1 信号同时发送/接收两位。
通过将 QUADSPI_CCR 寄存器的 IMODE/ADMODE/ABMODE/DMODE 字段设置为 10,可
对不同的命令阶段分别进行配置,以使用双线 SPI 模式。
在每个已配置为双线模式的阶段中:
IO0/IO1 在数据阶段进行读取操作时处于高阻态(输入),在其他情况下为输出
IO2 处于输出模式并强制置“0”
IO3 处于输出模式并强制置“1”
在空指令阶段,若 DMODE = 01,则 IO0/IO1 始终保持高阻态。
四线 SPI 模式:
在四线模式下,通过 IO0/IO1/IO2/IO3 信号同时发送/接收四位。
通过将 QUADSPI_CCR 寄存器的 IMODE/ADMODE/ABMODE/DMODE 字段设置为 11,可
对不同的命令阶段分别进行配置,以使用四线 SPI 模式。
在每个已配置为四线模式的阶段中,IO0/IO1/IO2/IO3 在数据阶段进行读取操作时均处于高
阻态(输入),在其他情况下为输出。
在空指令阶段中,若 DMODE = 11,则 IO0/IO1/IO2/IO3 均为高阻态。
IO2 和 IO3 仅用于 Quad SPI 模式 如果未配置任何阶段使用四线 SPI 模式,即使 QUADSPI
激活,对应 IO2 和 IO3 的引脚也可用于其他功能。
SDR 模式(默认工作模式)
默认情况下,QUADSPI 在单倍数据速率 (SDR) 模式下工作。
在 SDR 模式下,当 QUADSPI 驱动 IO0/SO、IO1、IO2、IO3 信号时,这些信号仅在 CLK
的下降沿发生转变。
在 SDR 模式下接收数据时,QUADSPI 假定 Flash 也通过 CLK 的下降沿发送数据。默认情
况下 (SSHIFT = 0 时),将使用 CLK 后续的边沿(上升沿)对信号进行采样。
DDR 模式
在 DDR 模式下,当 QUADSPI 在地址/交替字节/数据阶段驱动 IO0/SO、IO1、IO2、IO3 信
号时,将在 CLK 的每个上升沿和下降沿发送 1 位。
指令阶段不受 DDRM 的影响。始终通过 CLK 的下降沿发送指令。
在 DDR 模式下接收数据时,QUADSPI 假定 Flash 通过 CLK 的上升沿和下降沿均发送数
据。若 DDRM = 1,固件必须清零 SSHIFT 位 (QUADSPI_CR[4])。因此,在半个 CLK 周期
后(下一个反向边沿)对信号采样。
五、QSPI 配置(HAL库)
1.首先根据硬件电路,配置相关引脚,开启引脚和QSPI时钟

void HAL_QSPI_MspInit(QSPI_HandleTypeDef* qspiHandle)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
if(qspiHandle->Instance==QUADSPI)
{
/* USER CODE BEGIN QUADSPI_MspInit 0 */
/* USER CODE END QUADSPI_MspInit 0 */
/* QUADSPI clock enable */
__HAL_RCC_QSPI_CLK_ENABLE();
__HAL_RCC_GPIOE_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
/**QUADSPI GPIO Configuration
PE2 ------> QUADSPI_BK1_IO2
PB6 ------> QUADSPI_BK1_NCS
PB2 ------> QUADSPI_CLK
PD12 ------> QUADSPI_BK1_IO1
PD13 ------> QUADSPI_BK1_IO3
PD11 ------> QUADSPI_BK1_IO0
*/
GPIO_InitStruct.Pin = GPIO_PIN_2;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF9_QUADSPI;
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_6;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF10_QUADSPI;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_2;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF9_QUADSPI;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_12|GPIO_PIN_13|GPIO_PIN_11;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF9_QUADSPI;
HAL_GPIO_Init(GPIOD, &GPIO_InitStruct);
/* USER CODE BEGIN QUADSPI_MspInit 1 */
/* USER CODE END QUADSPI_MspInit 1 */
}
}2.接着初始化SPI外设
QSPI_HandleTypeDef hqspi;
/* QUADSPI init function */
void MX_QUADSPI_Init(void)
{
hqspi.Instance = QUADSPI;//QSPI外设
hqspi.Init.ClockPrescaler = 2;//QPSI分频比,N25Q128最大频率为104M,此处216/(2+1)=72M
hqspi.Init.FifoThreshold = 4;//FIFO阈值为4个字节
hqspi.Init.SampleShifting = QSPI_SAMPLE_SHIFTING_HALFCYCLE;//采样移位半个周期(DDR模式下,必须设置为0)
hqspi.Init.FlashSize = POSITION_VAL(0X1000000)-1;//SPI FLASH大小,N25Q128大小为16M字节
hqspi.Init.ChipSelectHighTime = QSPI_CS_HIGH_TIME_6_CYCLE;//片选高电平时间为6个时钟(1/72*6=55.2ns),即手册里面的tSHSL参数
hqspi.Init.ClockMode = QSPI_CLOCK_MODE_0;//时钟模式0
hqspi.Init.FlashID = QSPI_FLASH_ID_1;//第一片flash
hqspi.Init.DualFlash = QSPI_DUALFLASH_DISABLE;//禁止双FLASH模式
if (HAL_QSPI_Init(&hqspi) != HAL_OK)//初始化QSPI外设
{
Error_Handler();
}
}3.由于使用的是间接模式,我们对FLASH的所有操作都需要通过FLASH内部寄存器来完成,也就是通过向FALSH发送对应的指令来获得我们想要的结果,此时的FALSH就是一个普通的SPI协议外设,所以接下来所有对FALSH所有的操作都需要先发送相关指令,我们需要配置指令参数(指令类型、地址、数据宽度、地址宽度等等)。
我们首先需要配置下面的命令参数结构体:
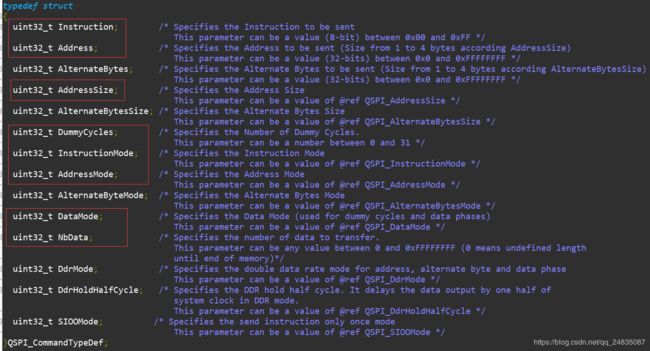
Instruction:指令类型(读、写、擦除等等)
Address:需要读取或写入数据的起始地址
NbData:需要读取或写入数据的长度
DataMode:数据传输模式,就是数据用几根线传输(1、2、4线可选),后面的AddreMode类似,就是用几根线传输地址,InstructionMode就是用几根线传输指令。
这三个参数都需要根据芯片数据手册来选择,手册上说明支持该模式才可以选择,否则会通信错误,另外,数据传输模式的不同,对应的指令类型也会不同,比如N25Q128 READ指令对应单线传输模式,Quad I/O Fast Read则对应四线传输模式,这些对应关系手册上都有详细说明!!!
4.读取芯片JEDEC ID
首先查看手册上读取JEDEC ID的时序:
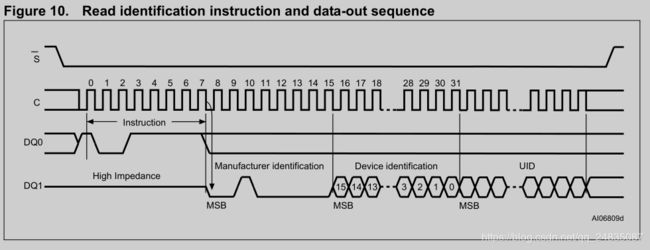
可以看出,读ID这条指令是只有指令阶段和数据阶段,且都是单线传输模式,所以
InstructionMode = QSPI_INSTRUCTION_1_LINE;//指令单线传输模式
DataMode = QSPI_DATA_1_LINE;//数据单线传输模式
Address和AddressMode 这两个参数的值都置0,表示无地址。
NbData :是想要读取的数据长度+1,ID是3个字节,这里令NbData=3
其他值和下面代码保持一致即可。
然后 使用HAL_QSPI_Command函数将读ID指令发送给FALSH,等待发送完成
最后 调用HAL_QSPI_Receive,接受FALSH返回的数据,即芯片ID
/**
* @brief 读取FLASH ID
* @param 无
* @retval FLASH ID
*/
uint32_t QSPI_FLASH_ReadID(void)
{
QSPI_CommandTypeDef s_command;
uint32_t Temp = 0;
uint8_t pData[3];
/* 读取JEDEC ID */
s_command.InstructionMode = QSPI_INSTRUCTION_1_LINE;//指令阶段的操作模式,00:无指令;01:单线传输指令;10:双线传输指令;11:四线传输指令。
s_command.Instruction = READ_JEDEC_ID_CMD;//读取芯片ID指令
s_command.AddressSize = QSPI_ADDRESS_24_BITS;//定义地址长度
s_command.DataMode = QSPI_DATA_1_LINE;//定义数据阶段的操作模式,00:无数据;01:单线传输数据;10:双线传输数据;11:四线传输数据。
s_command.AddressMode = 0;//地址阶段的操作模式,00:无地址;01:单线传输地址;10:双线传输地址;11:四线传输地址。
s_command.Address = 0;
s_command.AlternateByteMode = QSPI_ALTERNATE_BYTES_NONE;//交替字节长度
s_command.DummyCycles = 0;//空指令阶段的持续时间,在 SDR 和 DDR 模式下,它指定 CLK 周期数 (0-31)。
s_command.NbData = 3;//设置数据长度,在间接模式和状态轮询模式下待检索的数据数量(值 + 1)。对状态轮询模式应使用不大于 3 的值(表示 4 字节)。
s_command.DdrMode = QSPI_DDR_MODE_DISABLE;//地址、交替字节和数据阶段设置 DDR 模式,0:禁止 DDR 模式;1:使能 DDR 模式。
s_command.DdrHoldHalfCycle = QSPI_DDR_HHC_ANALOG_DELAY;//设置DDR 模式下数据输出延迟 1/4 个 QUADSPI 输出时钟周期,0:使用模拟延迟来延迟数据输出;1:数据输出延迟 1/4 个 QUADSPI 输出时钟周期。
s_command.SIOOMode = QSPI_SIOO_INST_EVERY_CMD;//设置仅发送指令一次模式,。IMODE = 00 时,该位不起作用。0:在每个事务中发送指令;1:仅为第一条命令发送指令。
if(HAL_QSPI_Command(&hqspi, &s_command, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK)
{
#if QSPI_DEBUG
printf("send read flash ID command error!\r\n");
#endif
/* 用户可以在这里添加一些代码来处理这个错误 */
while (1) {}
}
if(HAL_QSPI_Receive(&hqspi, pData, HAL_QPSI_TIMEOUT_DEFAULT_VALUE)!= HAL_OK)
{
#if QSPI_DEBUG
printf("read qspi flash ID error!\r\n");
#endif
/* 用户可以在这里添加一些代码来处理这个错误 */
while (1) {}
}
Temp = ( pData[2] | pData[1]<<8 )| ( pData[0]<<16 );
return Temp;
}5.FALSH 写使能
在对FALSH进行写之前,需要打开写使能开关(实际上就是发送写使能指令):
类似的,需要查看芯片手册,写使能的时序

可以看到这个指令时序更简单,仅仅有指令阶段,所以地址和数据的参数都应置0
/**
* @brief QSPI FALSH写使能
* @param None
* @retval HAL_OK
*/
static HAL_StatusTypeDef QSPI_WriteEnable(void)
{
QSPI_CommandTypeDef sCommand;
QSPI_AutoPollingTypeDef sConfig;
/* Enable write operations ------------------------------------------ */
sCommand.InstructionMode = QSPI_INSTRUCTION_1_LINE;
sCommand.Instruction = WRITE_ENABLE_CMD;
sCommand.AddressMode = QSPI_ADDRESS_NONE;
sCommand.AlternateByteMode = QSPI_ALTERNATE_BYTES_NONE;
sCommand.DataMode = QSPI_DATA_NONE;
sCommand.DummyCycles = 0;
sCommand.DdrMode = QSPI_DDR_MODE_DISABLE;
sCommand.DdrHoldHalfCycle = QSPI_DDR_HHC_ANALOG_DELAY;
sCommand.SIOOMode = QSPI_SIOO_INST_EVERY_CMD;
if (HAL_QSPI_Command(&hqspi, &sCommand, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK)
{
return HAL_ERROR;
}
/* Configure automatic polling mode to wait for write enabling ---- */
sConfig.Match = 0x02;
sConfig.Mask = 0x02;
sConfig.MatchMode = QSPI_MATCH_MODE_AND;
sConfig.StatusBytesSize = 1;
sConfig.Interval = 0x10;
sConfig.AutomaticStop = QSPI_AUTOMATIC_STOP_ENABLE;
sCommand.Instruction = READ_STATUS_REG1_CMD;
sCommand.DataMode = QSPI_DATA_1_LINE;
if (HAL_QSPI_AutoPolling(&hqspi, &sCommand, &sConfig, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK)
{
return HAL_ERROR;
}
return HAL_OK;
}这里需要讲下 QUADSPI 状态标志轮询模式:
在自动轮询模式下,QUADSPI 周期性启动命令以读取一定数量的状态字节(最多 4 个)。
可屏蔽接收的字节以隔离一些状态位,从而在所选的位具有定义的值时可产生中断。
对 Flash 的访问最初与在间接读取模式下相同:如果不需要地址 (AMODE = 00),则在写入
QUADSPI_CCR 时即开始访问。否则,如果需要地址,则在写入 QUADSPI_AR 时开始第
一次访问。BUSY 在此时变为高电平,即使在周期性访问期间也保持不变。
在自动轮询模式下,MASK[31:0] (QUADSPI_PSMAR) 的内容用于屏蔽来自 Flash 的数据。
如果 MASK[n] = 0,则屏蔽结果的位 n,从而不考虑该位。如果 MASK[n] = 1 并且位 [n] 的内
容与 MATCH[n] (QUADSPI_PSMAR) 相同,说明存在位 n 匹配。
如果轮询匹配模式位 (PMM, QUADSPI_CR[23]) 为 0,将激活“AND”匹配模式。这意味着
状态匹配标志 (SMF) 仅在全部未屏蔽位均存在匹配时置 1。
如果 PMM = 1,则激活“OR”匹配模式。这意味着 SMF 在任意未屏蔽位存在匹配时置 1。
如果 SMIE = 1,则在 SMF 置 1 时调用一个中断。
如果自动轮询模式停止 (APMS) 位置 1,则操作停止并且 BUSY 位在检测到匹配时清零。否
则,BUSY 位保持为“1”,在发生中止或禁止 QUADSPI (EN = 0) 前继续进行周期性
访问。
数据寄存器 (QUADSPI_DR) 包含最新接收的状态字节(FIFO 停用)。数据寄存器的内容不
受匹配逻辑所用屏蔽方法的影响。FTF 状态位在新一次状态读取完成后置 1,并且 FTF 在数
据读取后清零。
简单的说,就是CPU自动查询FALSH指定的标志位是否置位或清零,通过调用HAL_QSPI_AutoPolling函数,CPU将自动查询FALSH写使能标志位是否被置位,成功返回HAL_OK,否则返回HAL_ERROR,这样就省去了我们自己发读寄存器指令查询的麻烦了。
6.读FALSH
这里仅介绍4线模式下的读FALSH流程,首先查看手册4线模式读时序

从时序图可以看出,指令是1线模式,地址是4线模式,空周期(DummyCycles)为10,数据也是4线模式,还有此时的读指令是QUAD_INOUT_FAST_READ_CMD。所以相关参数配置如下:
/**
* @brief 从QSPI存储器中读取大量数据.
* @param pData: 指向要读取的数据的指针
* @param ReadAddr: 读取起始地址
* @param Size: 要读取的数据大小
* @retval QSPI存储器状态
*/
HAL_StatusTypeDef BSP_QSPI_Read(uint8_t* pData, uint32_t ReadAddr, uint32_t Size)
{
QSPI_CommandTypeDef s_command;
/* 初始化读命令 */
s_command.InstructionMode = QSPI_INSTRUCTION_1_LINE;
s_command.Instruction = QUAD_INOUT_FAST_READ_CMD;
s_command.AddressMode = QSPI_ADDRESS_4_LINES;
s_command.AddressSize = QSPI_ADDRESS_24_BITS;
s_command.Address = ReadAddr;
s_command.AlternateByteMode = QSPI_ALTERNATE_BYTES_NONE;
s_command.DataMode = QSPI_DATA_4_LINES;
s_command.DummyCycles = 10;
s_command.NbData = Size;
s_command.DdrMode = QSPI_DDR_MODE_DISABLE;
s_command.DdrHoldHalfCycle = QSPI_DDR_HHC_ANALOG_DELAY;
s_command.SIOOMode = QSPI_SIOO_INST_EVERY_CMD;
/* 配置命令 */
if (HAL_QSPI_Command(&hqspi, &s_command, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK)
{
#if QSPI_DEBUG
printf("R-send read command error!\r\n");
#endif
return HAL_ERROR;
}
/* 接收数据 */
if(HAL_QSPI_Receive(&hqspi, pData, HAL_QPSI_TIMEOUT_DEFAULT_VALUE)!= HAL_OK)
{
#if QSPI_DEBUG
printf("R-read data error!\r\n");
#endif
return HAL_ERROR;
}
return HAL_OK;
}
本函数实现了从FALSH指定地址读取指定数量字节的功能
7.写FALSH
同读FALSH类似,我们需要在手册中找到4线写FALSH的时序:

根据时序图配置如下:1线指令,1线地址,24bit地址,4线数据,没有空周期
/**
* @brief 将大量数据写入QSPI存储器
* @param pData: 指向要写入数据的指针
* @param WriteAddr: 写起始地址
* @param Size: 要写入的数据大小
* @retval QSPI存储器状态
*/
HAL_StatusTypeDef BSP_QSPI_Write(uint8_t* pData, uint32_t WriteAddr, uint32_t Size)
{
QSPI_CommandTypeDef s_command;
uint32_t end_addr, current_size, current_addr;
unsigned char sector_start,sector_end,i;
/* 计算写入地址和页面末尾之间的大小 */
current_addr = 0;
while (current_addr <= WriteAddr)
{
current_addr += N25Q128FV_PAGE_SIZE;
}
current_size = current_addr - WriteAddr;
/* 检查数据的大小是否小于页面中的剩余位置 */
if (current_size > Size)
{
current_size = Size;
}
/* 初始化地址变量 */
current_addr = WriteAddr;
end_addr = WriteAddr + Size;
sector_start = current_addr >> 16;
sector_end = end_addr >> 16;
for( i = sector_start; i<=sector_end ;i++)
{
BSP_QSPI_Erase_Block(i); //擦除对应删除
}
/* 初始化程序命令 */
s_command.InstructionMode = QSPI_INSTRUCTION_1_LINE;
s_command.Instruction = QUAD_INPUT_PAGE_PROG_CMD;
s_command.AddressMode = QSPI_ADDRESS_1_LINE;
s_command.AddressSize = QSPI_ADDRESS_24_BITS;
s_command.AlternateByteMode = QSPI_ALTERNATE_BYTES_NONE;
s_command.DataMode = QSPI_DATA_4_LINES;
s_command.DummyCycles = 0;
s_command.DdrMode = QSPI_DDR_MODE_DISABLE;
s_command.DdrHoldHalfCycle = QSPI_DDR_HHC_ANALOG_DELAY;
s_command.SIOOMode = QSPI_SIOO_INST_EVERY_CMD;
/* 逐页执行写入 */
do {
s_command.Address = current_addr;
s_command.NbData = current_size;
/* 启用写操作 */
if (QSPI_WriteEnable() != HAL_OK)
{
#if QSPI_DEBUG
printf("W-Qspi write enable error!\r\n");
#endif
return HAL_ERROR;
}
/* 配置命令 */
if(HAL_QSPI_Command(&hqspi, &s_command, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK)
{
#if QSPI_DEBUG
printf("W-Qspi send Command error!\r\n");
#endif
return HAL_ERROR;
}
/* 传输数据 */
if(HAL_QSPI_Transmit(&hqspi, pData, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK)
{
#if QSPI_DEBUG
printf("W-Qspi Transmit data error!\r\n");
#endif
return HAL_ERROR;
}
/* 配置自动轮询模式等待程序结束 */
if(QSPI_AutoPollingMemReady(HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK)
{
#if QSPI_DEBUG
printf("W-AutoPollingMemReady error!\r\n");
#endif
return HAL_ERROR;
}
/* 更新下一页编程的地址和大小变量 */
current_addr += current_size;
pData += current_size;
current_size = ((current_addr + N25Q128FV_PAGE_SIZE) > end_addr) ? (end_addr-current_addr) :
N25Q128FV_PAGE_SIZE;
} while (current_addr < end_addr);
return HAL_OK;
}该函数实现从指定地址写入指定数量的字节。
8.擦除FALSH
第一种情况是按扇区擦除,这也是N25Q128最小的擦除单位(N25Q128共有256个扇区,每个扇区64KB)
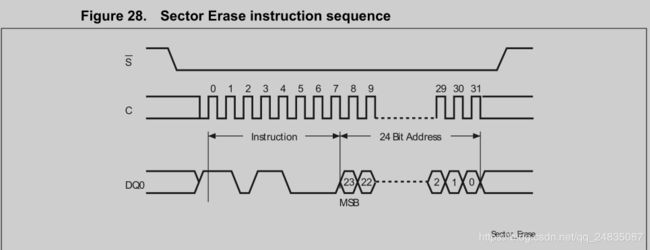
参数设置为1线指令 ,1线地址,24bit地址,无数据阶段
/**
* @brief 擦除QSPI存储器的指定扇区
* @param BlockAddress: 需要擦除的扇区地址
* @retval QSPI存储器状态
*/
HAL_StatusTypeDef BSP_QSPI_Erase_Sector(uint32_t Sector)
{
uint32_t SectorAddress=Sector << 16;//Sector*65535算出该扇区对应的地址
QSPI_CommandTypeDef s_command;
/* 初始化擦除命令 */
s_command.InstructionMode = QSPI_INSTRUCTION_1_LINE;
s_command.Instruction = SECTOR_ERASE_CMD;//按扇区擦除
s_command.AddressMode = QSPI_ADDRESS_1_LINE;
s_command.AddressSize = QSPI_ADDRESS_24_BITS;
s_command.Address = SectorAddress;
s_command.AlternateByteMode = QSPI_ALTERNATE_BYTES_NONE;
s_command.DataMode = QSPI_DATA_NONE;
s_command.DummyCycles = 0;
s_command.DdrMode = QSPI_DDR_MODE_DISABLE;
s_command.DdrHoldHalfCycle = QSPI_DDR_HHC_ANALOG_DELAY;
s_command.SIOOMode = QSPI_SIOO_INST_EVERY_CMD;
/* 启用写操作 */
if (QSPI_WriteEnable() != HAL_OK)
{
return HAL_ERROR;
}
/* 发送命令 */
if(HAL_QSPI_Command(&hqspi, &s_command, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK)
{
return HAL_ERROR;
}
/* 配置自动轮询模式等待擦除结束 */
if (QSPI_AutoPollingMemReady(HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK)
{
#if QSPI_DEBUG
printf("erase sector error!\r\n");
#endif
return HAL_ERROR;
}
return HAL_OK;
}第二种情况是全片擦除,时序如下:

全片擦除仅包含指令阶段,对于N25Q128来说,全片擦除耗时可达48s。
/**
* @brief 全片擦除 N25Q128全片擦除耗时48s
* @retval QSPI memory status
*/
uint8_t BSP_QSPI_Erase_Chip(void)
{
QSPI_CommandTypeDef s_command;
/* Initialize the erase command */
s_command.InstructionMode = QSPI_INSTRUCTION_1_LINE;
s_command.Instruction = CHIP_ERASE_CMD;
s_command.AddressMode = QSPI_ADDRESS_NONE;
s_command.AlternateByteMode = QSPI_ALTERNATE_BYTES_NONE;
s_command.DataMode = QSPI_DATA_NONE;
s_command.DummyCycles = 0;
s_command.DdrMode = QSPI_DDR_MODE_DISABLE;
s_command.DdrHoldHalfCycle = QSPI_DDR_HHC_ANALOG_DELAY;
s_command.SIOOMode = QSPI_SIOO_INST_EVERY_CMD;
/* Enable write operations */
if (QSPI_WriteEnable() != HAL_OK)
{
return HAL_ERROR;
}
/* Send the command */
if (HAL_QSPI_Command(&hqspi, &s_command, HAL_QPSI_TIMEOUT_DEFAULT_VALUE) != HAL_OK)
{
return HAL_ERROR;
}
/* Configure automatic polling mode to wait for end of erase */
if (QSPI_AutoPollingMemReady(N25Q128A_BULK_ERASE_MAX_TIME) != HAL_OK)
{
return HAL_ERROR;
}
return HAL_OK;
}9.测试程序
测试芯片写入和读取是否成功,首先向0x1FFFF地址连续写入4096个字节,然后再读取出来,对比两次数据是否一致。
unsigned char write[4096];
unsigned char read[4096];
void N25Qxx_Test(void)
{
uint32_t i = 0;
for(i = 0;i写入的数据(部分截图):

读取的数据(部分截图):
截取相同的部分,两次数据完全一致,写入和读取成功。
最后,讲几点需要注意的地方:
1.N25Q128 与 W25Q128 有很多不同的地方,特别是4线模式下,二者很多地方不同,代码不可混用,比如W25Q128的很多指令都是支持4线的,但是N25Q128的指令阶段均不支持4线模式。
2.硬件上使用了4线SPI,但是仍然可以使用单线SPI操作,只是速度慢了点,其他的没什么影响。
3.N25Q128在配置为内存映射模式时,外部 SPI 器件被视为是内部存储器。QUADSPI 外设若没有正确配置并使能,禁止访问 QUADSPI Flash 的存储区域。即使 Flash 容量更大,寻址空间也无法超过 256MB。如果访问的地址超出 FSIZE 定义的范围但仍在 256MB 范围内,则生成 AHB 错误。此错误的影响具体取决于尝试进行访问的 AHB 主设备:
如果为 Cortex ® CPU,则生成硬性故障 (Hard fault) 中断
如果为 DMA,则生成 DMA 传输错误,并自动禁用相应的 DMA 通道。
4.N25Q128包含248个主扇区,每个扇区64KB,还有8个64KB的启动扇区,这8个启动扇区又可分为128个子扇区,每个子扇区大小为4KB,所有的扇区擦除都可以按照一次64KB大小擦除,但是这8个启动扇区也可以按照4KB一次擦除(需要使用SUBSECTOR_ERASE_CMD指令擦除)。
5.N25Q128分TOP和Bottom架构,两种架构的区别就是启动扇区的位置不同,TOP架构的启动扇区是248~255(地址范围:F80000 ~FFFFFF),0~248为主扇区。Bottom架构的启动扇区是0~7(地址范围:0~7FFFF),8~255是主扇区。这两中架构可以通过完整的型号区分。
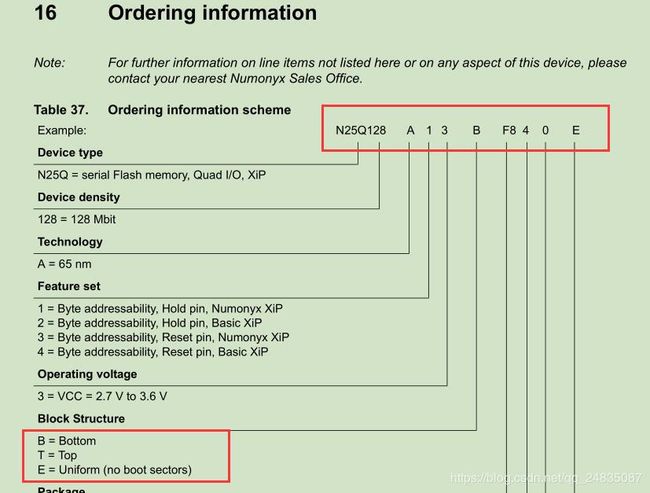
6.N25Q128和W25Q128 不可以相互替换,除非使用单线SPI通信,且只能使用F80000 ~FFFFFF或者0~7FFFF范围内的内存。
7.N25Q128的指令在不同spi模式(单线、双线、四线)下有所不同,使用时一定要特别注意!!!
QQ:754660251 欢迎一起交流学习