天池实战-街景字符编码识别-task4模型的训练和验证
写在前面的话
前三节我们进行了数据的预处理,介绍了赛题的相关背景:天池实战-街景字符编码识别-task1赛题理解
通过Pytorch 批量读取图像数据并进行图像预处理:天池实战-街景字符编码识别-task2数据预处理
最后通过CNN模型完成字符识别功能以及介绍如何在Pytorch 下进行模型的建立:天池实战-街景字符编码识别-task3模型建立。
这节主要介绍模型的训练和验证。
因为这节Datawhale提供了很详细的说明文档,小一也自认为没有人家写的好,这里就直接转载过来吧,贴一下源文档的路径:Datawhale 零基础入门CV赛事-Task4 模型训练与验证
为了方便阅读,部分内容有改动。
模型训练与验证
本节将从构建验证集、模型训练和验证、模型保存与加载和模型调参几个部分讲解,在部分小节中将会结合Pytorch代码进行讲解。
1. 学习目标
- 理解验证集的作用,并使用训练集和验证集完成训练
- 学会使用Pytorch环境下的模型读取和加载,并了解调参流程
2. 构造验证集
在机器学习模型(特别是深度学习模型)的训练过程中,模型是非常容易过拟合的。深度学习模型在不断的训练过程中训练误差会逐渐降低,但测试误差的走势则不一定。
在模型的训练过程中,模型只能利用训练数据来进行训练,模型并不能接触到测试集上的样本。
因此模型如果将训练集学的过好,模型就会记住训练样本的细节,导致模型在测试集的泛化效果较差,这种现象称为过拟合(Overfitting)。与过拟合相对应的是欠拟合(Underfitting),即模型在训练集上的拟合效果较差。
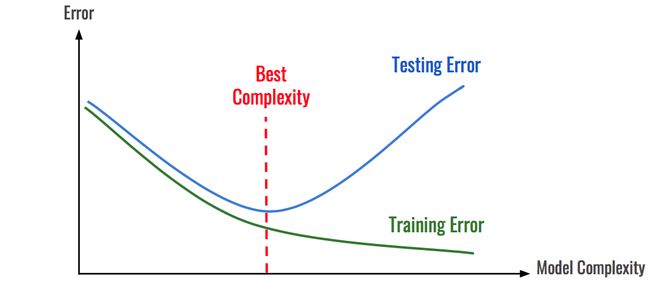
如图所示:随着模型复杂度和模型训练轮数的增加,CNN模型在训练集上的误差会降低,但在测试集上的误差会逐渐降低,然后逐渐升高,而我们为了追求的是模型在测试集上的精度越高越好。
导致模型过拟合的情况有很多种原因,其中最为常见的情况是模型复杂度(Model Complexity )太高,导致模型学习到了训练数据的方方面面,学习到了一些细枝末节的规律。
解决上述问题最好的解决方法:构建一个与测试集尽可能分布一致的样本集(可称为验证集),在训练过程中不断验证模型在验证集上的精度,并以此控制模型的训练。
在一般情况下,我们可以自己在本地划分出一个验证集出来,进行本地验证。训练集、验证集和测试集分别有不同的作用:
- 训练集(Train Set):模型用于训练和调整模型参数;
- 验证集(Validation Set):用来验证模型精度和调整模型超参数;
- 测试集(Test Set):验证模型的泛化能力。
因为训练集和验证集是分开的,所以模型在验证集上面的精度在一定程度上可以反映模型的泛化能力。在划分验证集的时候,需要注意验证集的分布应该与测试集尽量保持一致,不然模型在验证集上的精度就失去了指导意义。
既然验证集这么重要,那么如何划分本地验证集呢?
在一些比赛中,赛题方会给定验证集;如果赛题方没有给定验证集,那么参赛选手就需要从训练集中拆分一部分得到验证集。
验证集的划分有如下几种方式:
-
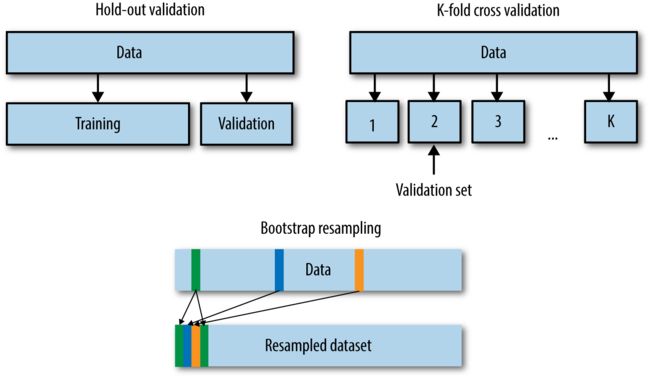
留出法(Hold-Out)
直接将训练集划分成两部分,新的训练集和验证集。这种划分方式的优点是最为直接简单;缺点是只得到了一份验证集,有可能导致模型在验证集上过拟合。留出法应用场景是数据量比较大的情况。
-
交叉验证法(Cross Validation,CV)
将训练集划分成K份,将其中的K-1份作为训练集,剩余的1份作为验证集,循环K训练。这种划分方式是所有的训练集都是验证集,最终模型验证精度是K份平均得到。它的优点是验证集精度比较可靠,训练K次可以得到K个有多样性差异的模型;CV验证的缺点是需要训练K次,不适合数据量很大的情况。
-
自助采样法(BootStrap)
通过有放回的采样方式得到新的训练集和验证集,每次的训练集和验证集都是有区别的。这种划分方式一般适用于数据量较小的情况。
当然这些划分方法是从数据划分方式的角度来讲的,在现有的数据比赛中一般采用的划分方法是留出法和交叉验证法。如果数据量比较大,留出法还是比较合适的。
当然任何的验证集的划分得到的验证集都是要保证训练集-验证集-测试集的分布是一致的,所以如果不管划分何种的划分方式都是需要注意的。
这里的分布一般指的是与标签相关的统计分布,比如在分类任务中“分布”指的是标签的类别分布,训练集-验证集-测试集的类别分布情况应该大体一致;如果标签是带有时序信息,则验证集和测试集的时间间隔应该保持一致。
3. 模型训练与验证
在本节我们目标使用Pytorch来完成CNN的训练和验证过程,CNN网络结构与之前的章节中保持一致。我们需要完成的逻辑结构如下:
- 构造训练集和验证集;
- 每轮进行训练和验证,并根据最优验证集精度保存模型。
train_loader = torch.utils.data.DataLoader(
train_dataset,
batch_size=10,
shuffle=True,
num_workers=10,
)
val_loader = torch.utils.data.DataLoader(
val_dataset,
batch_size=10,
shuffle=False,
num_workers=10,
)
model = SVHN_Model1()
criterion = nn.CrossEntropyLoss (size_average=False)
optimizer = torch.optim.Adam(model.parameters(), 0.001)
best_loss = 1000.0
for epoch in range(20):
print('Epoch: ', epoch)
train(train_loader, model, criterion, optimizer, epoch)
val_loss = validate(val_loader, model, criterion)
# 记录下验证集精度
if val_loss < best_loss:
best_loss = val_loss
torch.save(model.state_dict(), './model.pt')
其中每个Epoch的训练代码如下:
def train(train_loader, model, criterion, optimizer, epoch):
# 切换模型为训练模式
model.train()
for i, (input, target) in enumerate(train_loader):
c0, c1, c2, c3, c4, c5 = model(data[0])
loss = criterion(c0, data[1][:, 0]) + \
criterion(c1, data[1][:, 1]) + \
criterion(c2, data[1][:, 2]) + \
criterion(c3, data[1][:, 3]) + \
criterion(c4, data[1][:, 4]) + \
criterion(c5, data[1][:, 5])
loss /= 6
optimizer.zero_grad()
loss.backward()
optimizer.step()
其中每个Epoch的验证代码如下:
def validate(val_loader, model, criterion):
# 切换模型为预测模型
model.eval()
val_loss = []
# 不记录模型梯度信息
with torch.no_grad():
for i, (input, target) in enumerate(val_loader):
c0, c1, c2, c3, c4, c5 = model(data[0])
loss = criterion(c0, data[1][:, 0]) + \
criterion(c1, data[1][:, 1]) + \
criterion(c2, data[1][:, 2]) + \
criterion(c3, data[1][:, 3]) + \
criterion(c4, data[1][:, 4]) + \
criterion(c5, data[1][:, 5])
loss /= 6
val_loss.append(loss.item())
return np.mean(val_loss)
4. 模型的保存与加载
序列化(保存)与反序列化(读取)
模型可以保存整个module,或者只保存整个module的参数
- 保存整个module:torch.save(net, path)
- 只保存模型参数:torch.save(net.state_dict(), path)
相应的读取模型:
- 读取整个模型:torch.load(fpath)
- 读取模型参数:net.load_state_dict(torch.load(path))。使用的时候需要先创建一个网络,然后加载模型参数即可
5. 设置模型断点
设置模型断点checkpoint防止在模型训练过程中意外中断,在断点中需要保存模型的数据,优化器的数据和迭代次数等
在每次开始训练模型的时候都应该判断是否存在断点,方便进行模型恢复
6. 模型的微调(finetune)
模型微调的步骤:
- 获取预训练模型参数(源任务当中学习到的知识)
- 加载模型(load_state_dict)将学习到的知识放到新的模型
- 修改输出层, 以适应新的任务
模型微调的训练方法:
- 固定预训练的参数(requires_grad=False; lr=0)
- Features Extractor较小学习率(params_group)
总结
本节以深度学习模型的训练和验证为基础,讲解了验证集划分方法、模型训练与验证、模型保存和加载以及模型调参流程。
需要注意的是模型复杂度是相对的,并不一定模型越复杂越好。在有限设备和有限时间下,需要选择能够快速迭代训练的模型。