基于金字塔LK的光流法实现—根据论文自己实现的c++代码
自己实现代码与opencv的接口函数对比
- 在VINS-Mono上效果对比
- 在两张图片上效果对比
- PyrLKTracking()源码
- 总结
最近自己在研究VINS-Mono源码的特征提取与追踪部分的原理以及代码实现。发现VINS-Mono的光流匹配用的是Opencv自己的API接口函数calcOpticalFlowPyrLK,关于这个函数的参数含义及意义在此不在详述,有兴趣的朋友可以自行上网查找。这个函数的底层代码我们是看不到的,又由于我对光流法的具体代码实现产生了浓厚兴趣,所以,我自己就看着《 Pyramidal Implementation of the Lucas Kanade Feature Tracker Description of the algorithm》论文以及参考网上的内容,一边看一边写,不怕大家笑话,搞了四五天,终于写出了一个可以应用在VINS-Mono上的源码。精度上虽然略逊于Opencv的接口函数一筹,但耗时上却大大慢于Opencv的接口函数(这里是往更坏的方向转折)。后面我会把代码分享出来,希望有大神可以指教。也好让我把代码优化优化,具体原理请参考我的博客《 图像金字塔LK光流法原理分析》。
在VINS-Mono上效果对比
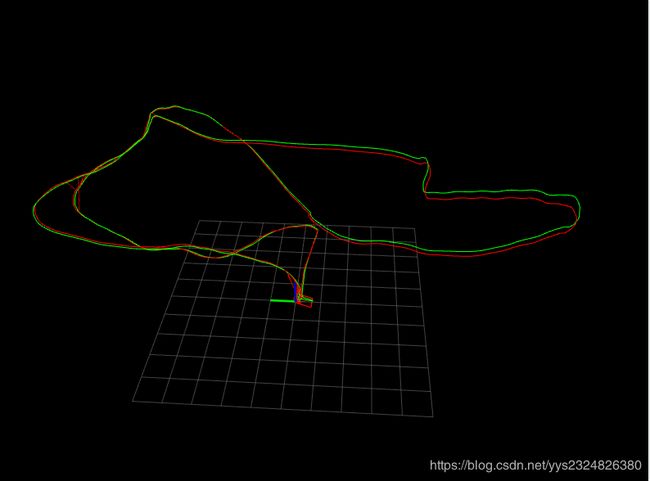
使用Opencv的API函数calcOpticalFlowPyrLK()得到的精度结果如下图所示,
使用我自己写的API函数PyrLKTracking()得到的精度结果如下图所示,
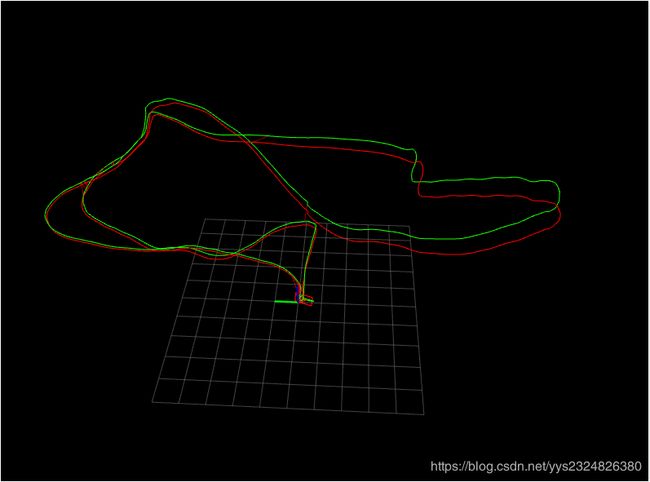
红线是标准轨迹,第一张图的绿线是应用Opencv接口函数进行VIO融合后的轨迹,可以看到误差较小。 第二张图的绿线是应用我自己实现的接口函数进行VIO融合后的轨迹,可以看到误差较大。所以说我的代码在精度上略逊一筹。
使用Opencv的API函数calcOpticalFlowPyrLK()得到的耗时结果如下图所示,
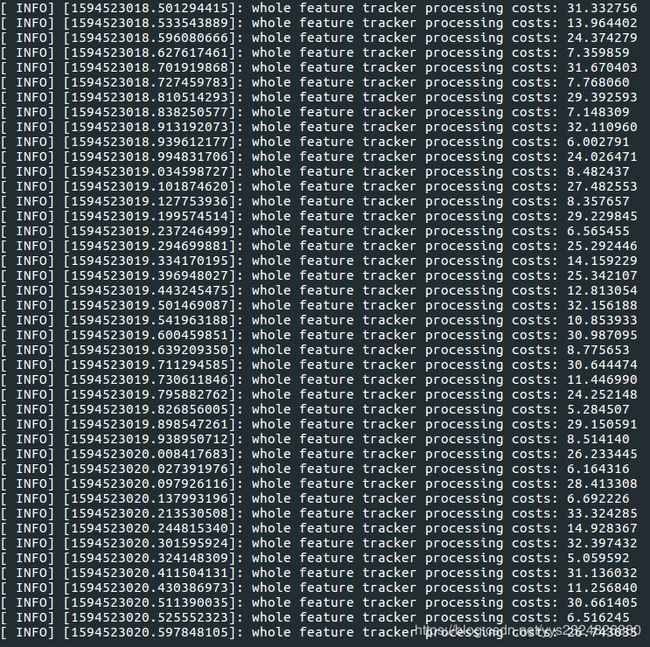
使用我自己写的API函数PyrLKTracking()得到的耗时结果如下图所示,
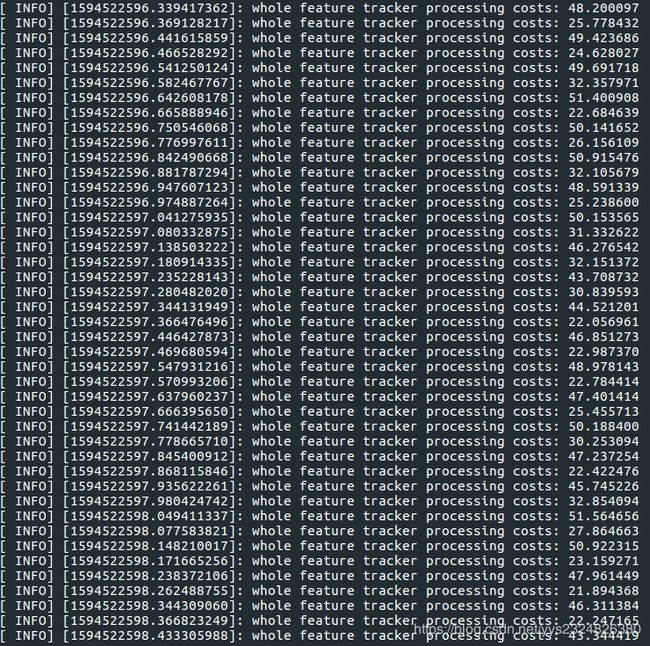
根据上面两张图可以估计一下Opencv的API函数耗时大致在5ms~33ms之间(追踪300个角点),跟踪很快。我的API函数耗时大致在21ms~51ms之间,跟踪很慢。所以说我的代码在耗时上逊色好多筹。
另外,我自己的API接口函数,在成功追踪的角点数量上也比不上Opencv的函数。
在两张图片上效果对比
使用Opencv的API函数calcOpticalFlowPyrLK()追踪到的角点数量结果如下图所示,

使用我自己写的API函数PyrLKTracking()追踪到的角点数量结果如下图所示,

显然,根据这两张图上角点连线的稀疏程度以及边缘匹配情况就可以看出,Opencv函数匹配的角点多,我自己的函数匹配的角点数量少,且边缘部分更为明显。
PyrLKTracking()源码
PyrLK_OpticalFlow.h头文件
#ifndef PyrLK_H
#define PyrLK_H
#include PyrLK_OpticalFlow.cpp文件
#include "PyrLK_OpticalFlow.h"
void lowpassFilter(InputArray src, OutputArray dst) {
Mat srcMat = src.getMat();
int dstWidth = srcMat.size().width / 2;
int dstHeight = srcMat.size().height / 2;
dst.create(Size(dstWidth, dstHeight), CV_8UC1);
Mat dstMat = dst.getMat();
copyMakeBorder(srcMat, srcMat, 1, 1, 1, 1, BORDER_REFLECT_101 + BORDER_ISOLATED);
for (int x = 0; x < dstHeight; x++) {
for (int y = 0; y < dstWidth; y++) {
double val = 0;
val += srcMat.at<uchar>(2 * x + 1, 2 * y + 1) * 0.25;
val += srcMat.at<uchar>(2 * x, 2 * y + 1) * 0.125;
val += srcMat.at<uchar>(2 * x + 2, 2 * y + 1) * 0.125;
val += srcMat.at<uchar>(2 * x + 1, 2 * y) * 0.125;
val += srcMat.at<uchar>(2 * x + 1, 2 * y + 2) * 0.125;
val += srcMat.at<uchar>(2 * x, 2 * y) * 0.0625;
val += srcMat.at<uchar>(2 * x + 2, 2 * y) * 0.0625;
val += srcMat.at<uchar>(2 * x, 2 * y + 2) * 0.0625;
val += srcMat.at<uchar>(2 * x + 2, 2 * y + 2) * 0.0625;
dstMat.at<uchar>(x, y) = (uchar)val;
}
}
}
Mat get_Ix(Mat src1, int p_x, int p_y, int windows_x, int windows_y)
{
src1 = src1(Rect(p_y, p_x, windows_y + 2, windows_x + 2));
src1.convertTo(src1, CV_64FC1, 0.167, 0);
Mat kernal = Mat::zeros(3, 3, CV_64FC1);
kernal.ATD(0, 0) = -1.0;
kernal.ATD(0, 1) = -1.0;
kernal.ATD(0, 2) = -1.0;
kernal.ATD(2, 0) = 1.0;
kernal.ATD(2, 1) = 1.0;
kernal.ATD(2, 2) = 1.0;
Mat Ix;
filter2D(src1, Ix, -1, kernal);
return Ix;
}
Mat get_Iy(Mat src1, int p_x, int p_y, int windows_x, int windows_y)
{
src1 = src1(Rect(p_y, p_x, windows_y + 2, windows_x + 2));
src1.convertTo(src1, CV_64FC1, 0.167, 0);
Mat kernal = Mat::zeros(3, 3, CV_64FC1);
kernal.ATD(0, 0) = -1.0;
kernal.ATD(1, 0) = -1.0;
kernal.ATD(2, 0) = -1.0;
kernal.ATD(0, 2) = 1.0;
kernal.ATD(1, 2) = 1.0;
kernal.ATD(2, 2) = 1.0;
Mat Iy;
filter2D(src1, Iy, -1, kernal);
return Iy;
}
double getSubPixel(Mat mat, double row, double col)
{
row = row + 1;
col = col + 1;
int floorRow = floor(row);
int floorCol = floor(col);
double fracRow = row - floorRow;
double fracCol = col - floorCol;
int ceilRow = floorRow + 1;
int ceilCol = floorCol + 1;
return ((1.0 - fracRow) * (1.0 - fracCol) * (double)mat.ptr<uchar>(floorRow)[floorCol]) +
(fracRow * (1.0 - fracCol) * (double)mat.ptr<uchar>(ceilRow)[floorCol]) +
((1.0 - fracRow) * fracCol * (double)mat.ptr<uchar>(floorRow)[ceilCol]) +
(fracRow * fracCol * (double)mat.ptr<uchar>(ceilRow)[ceilCol]);
}
void PyrLKTracking(Mat src1, Mat src2, vector<cv::Point2f> points1, vector<cv::Point2f>& points2,
vector<uchar>& states)
{
points2 = vector<cv::Point2f>(points1.size(), cv::Point2f(0,0));
int windows = 21;
int halfwin = (windows - 1) / 2;
states = vector<uchar>(points1.size(), 0);
Mat image_pyr1[4];
Mat image_pyr2[4];
image_pyr1[3] = src1;
image_pyr2[3] = src2;
for (int i = 3; i > 0; i--)
{
pyrDown(image_pyr1[i], image_pyr1[i - 1], Size(image_pyr1[i].cols / 2, image_pyr1[i].rows / 2));
pyrDown(image_pyr2[i], image_pyr2[i - 1], Size(image_pyr2[i].cols / 2, image_pyr2[i].rows / 2));
}
Mat image_exp1[4];
Mat image_exp2[4];
for (int i = 0; i < 4; i++)
{
copyMakeBorder(image_pyr1[i], image_exp1[i], 1, 1, 1, 1, BORDER_REFLECT_101 + BORDER_ISOLATED);
copyMakeBorder(image_pyr2[i], image_exp2[i], 1, 1, 1, 1, BORDER_REFLECT_101 + BORDER_ISOLATED);
}
for (int i = 0; i < (int)points1.size(); i++)
{
bool loop_start = false;
int pixel_x = points1[i].y;
int pixel_y = points1[i].x;
Eigen::Vector2f ggl{ 0, 0 };
for (int j = 0; j < 4; j++)
{
int heightl = image_pyr1[j].rows;
int widthl = image_pyr1[j].cols;
double pixel_Subxl = pixel_x / pow(2.0, 3 - j);
double pixel_Subyl = pixel_y / pow(2.0, 3 - j);
int pixel_xl = round(pixel_Subxl);
int pixel_yl = round(pixel_Subyl);
int windows_x, windows_y, start_x, start_y;
if (pixel_xl - halfwin < 0)
{
windows_x = halfwin + pixel_xl + 1;
start_x = 0;
}
else if (pixel_xl + halfwin > heightl - 1)
{
windows_x = halfwin + heightl - pixel_xl;
start_x = pixel_xl - halfwin;
}
else
{
windows_x = windows;
start_x = pixel_xl - halfwin;
}
if (pixel_yl - halfwin < 0)
{
windows_y = halfwin + pixel_yl + 1;
start_y = 0;
}
else if (pixel_yl + halfwin > widthl - 1)
{
windows_y = halfwin + widthl - pixel_yl;
start_y = pixel_yl - halfwin;
}
else
{
windows_y = windows;
start_y = pixel_yl - halfwin;
}
Mat Ix = get_Ix(image_exp1[j], start_x, start_y, windows_x, windows_y);
Mat Iy = get_Iy(image_exp1[j], start_x, start_y, windows_x, windows_y);
Mat Ix2 = Ix.mul(Ix);
Mat Iy2 = Iy.mul(Iy);
Mat Ixy = Ix.mul(Iy);
double Ix2Sum = 0;
double Iy2Sum = 0;
double IxIySum = 0;
for (int jj = 1; jj < windows_x + 1; jj++)
{
for (int kk = 1; kk < windows_y + 1; kk++)
{
Ix2Sum = Ix2Sum + Ix2.ATD(jj, kk);
Iy2Sum = Iy2Sum + Iy2.ATD(jj, kk);
IxIySum = IxIySum + Ixy.ATD(jj, kk);
}
}
Eigen::Matrix2f GG;
GG(0, 0) = Ix2Sum;
GG(1, 0) = IxIySum;
GG(0, 1) = IxIySum;
GG(1, 1) = Iy2Sum;
Eigen::Vector2f vv{ 0.0, 0.0 };
Eigen::Vector2f threshold;
double thth;
for (int mm = 0; mm < 20; mm++)
{
double delt_IIx = 0;
double delt_IIy = 0;
int Global_x1, Global_y1;
for (int jj = 1; jj < windows_x + 1; jj++)
{
for (int kk = 1; kk < windows_y + 1; kk++)
{
if (pixel_xl - halfwin < 0)
Global_x1 = jj;
else
Global_x1 = jj + pixel_xl - halfwin;
if (pixel_yl - halfwin < 0)
Global_y1 = kk;
else
Global_y1 = kk + pixel_yl - halfwin;
double Global_Sbux2 = ((double)Global_x1 + ggl.x() + vv.x());
double Global_Sbuy2 = ((double)Global_y1 + ggl.y() + vv.y());
int Global_x2 = (int)(Global_Sbux2);
int Global_y2 = (int)(Global_Sbuy2);
if (Global_x2 < 0 || Global_y2 < 0 || Global_x2>(heightl)
|| Global_y2>(widthl))
{
loop_start = true;
goto someone;
}
double delt_I;
//if ((Global_Sbux2 != Global_x2)||(Global_Sbuy2 != Global_y2))
if (true)
{
int floorRow = floor(Global_Sbux2);
int floorCol = floor(Global_Sbuy2);
double fracRow = Global_Sbux2 - floorRow;
double fracCol = Global_Sbuy2 - floorCol;
int ceilRow = floorRow + 1;
int ceilCol = floorCol + 1;
double delt_I1 = (double)image_exp1[j].at<uchar>(Global_x1, Global_y1) -
(((1.0 - fracRow) * (1.0 - fracCol) * (double)image_exp2[j].ptr<uchar>(floorRow)[floorCol]) +
(fracRow * (1.0 - fracCol) * (double)image_exp2[j].ptr<uchar>(ceilRow)[floorCol]) +
((1.0 - fracRow) * fracCol * (double)image_exp2[j].ptr<uchar>(floorRow)[ceilCol]) +
(fracRow * fracCol * (double)image_exp2[j].ptr<uchar>(ceilRow)[ceilCol]));
delt_I = delt_I1;
}
else
{
int delt_I2 = image_pyr1[j].at<uchar>(Global_x1, Global_y1) -
image_pyr2[j].at<uchar>(Global_x2, Global_y2);
delt_I = delt_I2;
}
delt_IIx = delt_IIx + delt_I*Ix.ATD(jj, kk);
delt_IIy = delt_IIy + delt_I*Iy.ATD(jj, kk);
}
}
Eigen::Vector2f bbk;
bbk(0, 0) = delt_IIx;
bbk(1, 0) = delt_IIy;
threshold = GG.inverse()*bbk;
thth = threshold.norm();
vv = vv + threshold;
if (thth < 0.05)
{
break;
}
}
ggl = 2 * (vv + ggl);
if (j == 3 && thth<0.05)
{
states[i] = 1;
}
}
someone:
if (loop_start)
continue;
Eigen::Vector2d dd;
dd.x() = round(ggl.x() / 2);
dd.y() = round(ggl.y() / 2);
pixel_x = pixel_x + dd.x();
pixel_y = pixel_y + dd.y();
if (states[i])
{
points2[i].x = pixel_y;
points2[i].y = pixel_x;
}
}
}
函数参数介绍
void PyrLKTracking(Mat src1, Mat src2, vector<cv::Point2f> points1, vector<cv::Point2f>& points2,
vector<uchar>& states)
src1:原图像(灰度图)
src2:匹配图像(灰度图)
points1:原图像需要进行追踪的角点
points2:匹配图像追踪成功的角点
states:匹配成功的角点状态值为1,匹配失败的角点值为0
总结
该代码有必要进行进一步优化,感谢各位大神指教。