最新教程下载:http://www.armbbs.cn/forum.php?mod=viewthread&tid=93255
第18章 STM32F407的GPIO应用之跑马灯
本章教程为大家介绍STM32F407的GPIO应用之跑马灯,跑马灯作为经典的测试例程,可以让大家对STM32F407应用有个简单的整体认识。
18.1 初学者重要提示
18.2 跑马灯硬件设计
18.3 跑马灯软件驱动设计
18.4 跑马灯板级支持包(bsp_led.c)
18.5 实验例程设计框架
18.6 跑马灯驱动移植和使用
18.7 实验例程说明(MDK)
18.8 实验例程说明(IAR)
18.9 总结
18.1 初学者重要提示
- 学习本章节前,务必保证已经学习了第15,16和17章。
- 虽然是跑马灯的初级例程,但有必要掌握程序的基本设计框架,后面的例子都是建立在这个框架的基础上。
18.2 跑马灯硬件设计
跑马灯的硬件设计如下:

通过这个硬件设计,有如下四点需要学习:
18.2.1 灌电流驱动方式
关于拉电流、灌电流和相关的电气特性,在第15章的15.4小节做了专门的讲解。对于STM32F407来说,使用拉电流和灌电流驱动LED都是可以的,因为拉电流和灌电流时,STM32F407单个引脚最大可可达25mA。
开发板这里是采用的灌电流方式。
18.2.2 LED的压降和驱动电流
这种采用的是灌电流方式,而流经LED的电流大小是多少呢? 这里需要先补充一个基础的知识点。
直插超亮发光二极管压降,主要有三种颜色,然而三种发光二极管的压降都不相同,具体压降参考值如下:
- 红色发光二极管的压降为2.0V-2.2V。
- 黄色发光二极管的压降为1.8V-2.0V。
- 绿色发光二极管的压降为3.0V-3.2V。
- 正常发光时的额定电流约为20mA。
贴片LED压降:
- 红色的压降为1.82-1.88V,电流5-8mA。
- 绿色的压降为1.75-1.82V,电流3-5mA。
- 橙色的压降为1.7-1.8V,电流3-5mA。
- 蓝色的压降为3.1-3.3V,电流8-10mA。
- 白色的压降为3-3.2V,电流10-15mA。
实际测试开发板红色贴片LED的压降的确是1.8V左右,那么流过LED的电流就是
(3.3 – 1.8)/ 1K = 1.4mA
在不考虑二极管本身电阻的情况下,流过LED的电流就是1.4mA。
18.2.3 贴片LED的正负极区分
仔细查看开发板版上面所使用的贴片LED,会发现一端有绿点,有绿点的这端是负极,而另一端就是正级了。

18.3 跑马灯软件驱动设计
跑马灯的软件驱动实现比较简单,主要是IO初始化,LED亮,LED灭,LED翻转。对应的驱动文件也是实现了这几个功能,没有特别的技巧,所以大家看源代码也比较省事。
18.4 跑马灯板级支持包(bsp_led.c)
LED驱动文件bsp_led.c主要实现了如下几个API:
- bsp_InitLed
- bsp_LedOn
- bsp_LedOff
- bsp_LedToggle
- bsp_IsLedOn
下面将这几个API逐一进行说明。
18.4.1 函数bsp_InitLed
函数原型:
/* ********************************************************************************************************* * 函 数 名: bsp_InitLed * 功能说明: 配置LED指示灯相关的GPIO, 该函数被 bsp_Init() 调用。 * 形 参: 无 * 返 回 值: 无 ********************************************************************************************************* */ void bsp_InitLed(void) { GPIO_InitTypeDef GPIO_InitStruct; /* 打开GPIO时钟 */ LED_GPIO_CLK_ALLENABLE(); /* 配置所有的LED指示灯GPIO为推挽输出模式 由于将GPIO设置为输出时,GPIO输出寄存器的值缺省是0,因此会驱动LED点亮. 这是我不希望的,因此在改变GPIO为输出前,先关闭LED指示灯 */ bsp_LedOff(1); bsp_LedOff(2); bsp_LedOff(3); bsp_LedOff(4); /* 配置LED */ GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; /* 设置推挽输出 */ GPIO_InitStruct.Pull = GPIO_NOPULL; /* 上下拉电阻不使能 */ GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH; /* GPIO速度等级 */ GPIO_InitStruct.Pin = GPIO_PIN_LED1; HAL_GPIO_Init(GPIO_PORT_LED1, &GPIO_InitStruct); GPIO_InitStruct.Pin = GPIO_PIN_LED2; HAL_GPIO_Init(GPIO_PORT_LED2, &GPIO_InitStruct); GPIO_InitStruct.Pin = GPIO_PIN_LED3; HAL_GPIO_Init(GPIO_PORT_LED3, &GPIO_InitStruct); GPIO_InitStruct.Pin = GPIO_PIN_LED4; HAL_GPIO_Init(GPIO_PORT_LED4, &GPIO_InitStruct); }
函数描述:
此函数主要用于LED初始化。由于将GPIO设置为输出时,GPIO输出寄存器的值缺省是0,因此会驱动LED点亮,因此在改变GPIO为输出前,先关闭LED指示灯。
使用举例:
这里底层驱动初始化一般都是在bsp.c文件的函数bsp_Init里面调用。
18.4.2 函数bsp_LedOn
函数原型:
/* ********************************************************************************************************* * 函 数 名: bsp_LedOn * 功能说明: 点亮指定的LED指示灯。 * 形 参: _no : 指示灯序号,范围 1 - 4 * 返 回 值: 无 ********************************************************************************************************* */ void bsp_LedOn(uint8_t _no) { _no--; if (_no == 0) { GPIO_PORT_LED1->BSRR = (uint32_t)GPIO_PIN_LED1 << 16U; } else if (_no == 1) { GPIO_PORT_LED2->BSRR = (uint32_t)GPIO_PIN_LED2 << 16U; } else if (_no == 2) { GPIO_PORT_LED3->BSRR = (uint32_t)GPIO_PIN_LED3 << 16U; } else if (_no == 3) { GPIO_PORT_LED3->BSRR = (uint32_t)GPIO_PIN_LED4 << 16U; } }
函数描述:
此函数主要用于点亮LED,使用BSRR寄存器实现,使用这个寄存器的好处是可以实现原子操作。
函数参数:
- 第1个参数用于指定点亮那个LED,范围1-4。
使用举例:
此函数的使用比较简单,需要调用的时候直接调用即可。另外使用前记得先调用函数bsp_InitLed。
18.4.3 函数bsp_LedOff
函数原型:
/* ********************************************************************************************************* * 函 数 名: bsp_LedOff * 功能说明: 熄灭指定的LED指示灯。 * 形 参: _no : 指示灯序号,范围 1 - 4 * 返 回 值: 无 ********************************************************************************************************* */ void bsp_LedOff(uint8_t _no) { _no--; if (_no == 0) { GPIO_PORT_LED1->BSRR = GPIO_PIN_LED1; } else if (_no == 1) { GPIO_PORT_LED2->BSRR = GPIO_PIN_LED2; } else if (_no == 2) { GPIO_PORT_LED3->BSRR = GPIO_PIN_LED3; } else if (_no == 3) { GPIO_PORT_LED4->BSRR = GPIO_PIN_LED4; } }
函数描述:
此函数主要用于熄灭LED,使用BSRR寄存器实现,使用这个寄存器的好处是可以实现原子操作。
函数参数:
- 第1个参数用于指定熄灭那个LED,范围1-4。
使用举例:
此函数的使用比较简单,需要调用的时候直接调用即可。另外使用前记得先调用函数bsp_InitLed。
18.4.4 函数bsp_LedToggle
函数原型:
/* ********************************************************************************************************* * 函 数 名: bsp_LedToggle * 功能说明: 翻转指定的LED指示灯。 * 形 参: _no : 指示灯序号,范围 1 - 4 * 返 回 值: 按键代码 ********************************************************************************************************* */ void bsp_LedToggle(uint8_t _no) { if (_no == 1) { GPIO_PORT_LED1->ODR ^= GPIO_PIN_LED1; } else if (_no == 2) { GPIO_PORT_LED2->ODR ^= GPIO_PIN_LED2; } else if (_no == 3) { GPIO_PORT_LED3->ODR ^= GPIO_PIN_LED3; } else if (_no == 4) { GPIO_PORT_LED4->ODR ^= GPIO_PIN_LED4; } }
函数描述:
此函数主要用于翻转LED,通过GPIO的ODR寄存器进行设置。
函数参数:
- 第1个参数用于指定翻转那个LED,范围1-4。
使用举例:
此函数的使用比较简单,需要调用的时候直接调用即可。另外使用前记得先调用函数bsp_InitLed。
18.4.5 函数bsp_IsLedOn
函数原型:
/* ********************************************************************************************************* * 函 数 名: bsp_IsLedOn * 功能说明: 判断LED指示灯是否已经点亮。 * 形 参: _no : 指示灯序号,范围 1 - 4 * 返 回 值: 1表示已经点亮,0表示未点亮 ********************************************************************************************************* */ uint8_t bsp_IsLedOn(uint8_t _no) { if (_no == 1) { if ((GPIO_PORT_LED1->ODR & GPIO_PIN_LED1) == 1) { return 1; } return 0; } else if (_no == 2) { if ((GPIO_PORT_LED2->ODR & GPIO_PIN_LED2) == 1) { return 1; } return 0; } else if (_no == 3) { if ((GPIO_PORT_LED3->ODR & GPIO_PIN_LED3) == 1) { return 1; } return 0; } else if (_no == 4) { if ((GPIO_PORT_LED4->ODR & GPIO_PIN_LED4) == 1) { return 1; } return 0; } return 0; }
函数描述:
此函数主要用于获取LED亮灭状态。
函数参数:
- 第1个参数用于指定获取那个LED的亮灭状态,范围1-4。
使用举例:
此函数的使用比较简单,需要调用的时候直接调用即可。另外使用前记得先调用函数bsp_InitLed。
18.5 跑马灯驱动移植和使用
跑马灯控制比较简单:
- 第1步:复制bsp_led.c和bsp_led.h到自己的工程目录,并添加到工程里面。
- 第2步:根据自己使用的LED引脚,修改 bsp_led.c文件里面的函数bsp_InitLed。
- 第3步:这几个驱动文件主要用到HAL库的GPIO驱动文件,简单省事些可以添加所有HAL库.C源文件进来。
- 第4步,应用方法看本章节配套例子即可,另外就是根据自己的需要做其它配置修改。
18.6 实验例程设计框架
通过程序设计框架,让大家先对配套例程有一个全面的认识,然后再理解细节,本次实验例程的设计框架如下:
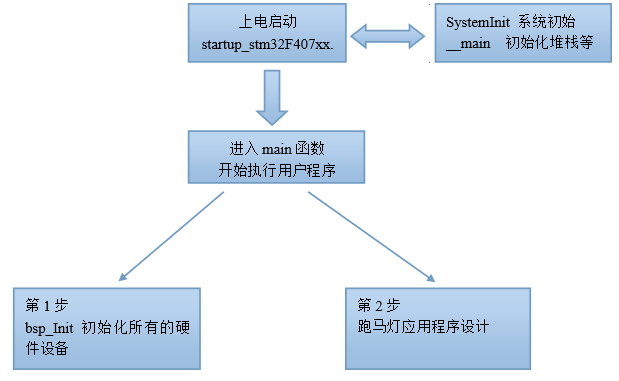
第1阶段,上电启动阶段:
- 这部分在第14章进行了详细说明。
第2阶段,进入main函数:
- 第1部分,硬件初始化,主要是HAL库,系统时钟,滴答定时器和LED。
- 第2部分,应用程序设计部分,实现了一个简易的跑马灯效果。
18.7 实验例程说明(MDK)
配套例子:
V5-002_跑马灯
实验目的:
- 学习F407平台的跑马灯实现。
实验内容:
- 启动一个自动重装软件定时器,每100ms翻转一次LED1和LED2。
- 再启动一个自动重装软件定时器,每500ms翻转一次LED3和LED4。
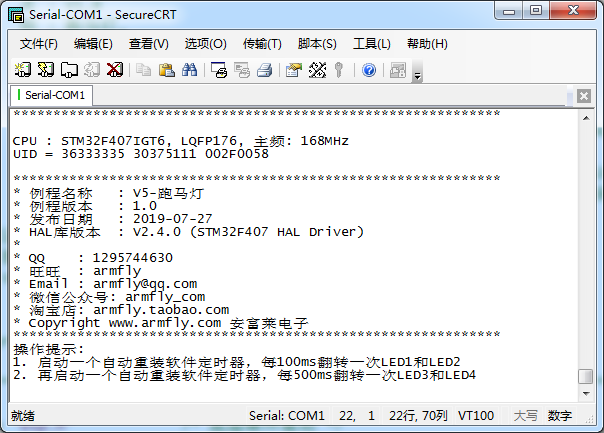
上电后串口打印的信息:
波特率 115200,数据位 8,奇偶校验位无,停止位 1
程序设计:
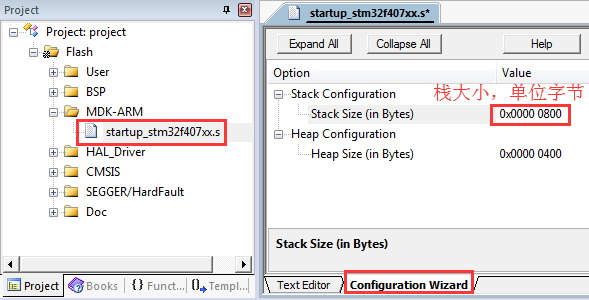
系统栈大小分配:
硬件外设初始化
硬件外设的初始化是在 bsp.c 文件实现:
/* ********************************************************************************************************* * 函 数 名: bsp_Init * 功能说明: 初始化所有的硬件设备。该函数配置CPU寄存器和外设的寄存器并初始化一些全局变量。只需要调用一次 * 形 参:无 * 返 回 值: 无 ********************************************************************************************************* */ void bsp_Init(void) { /* STM32H429 HAL 库初始化,此时系统用的还是F407自带的16MHz,HSI时钟: - 调用函数HAL_InitTick,初始化滴答时钟中断1ms。 - 设置NVIV优先级分组为4。 */ HAL_Init(); /* 配置系统时钟到168MHz - 切换使用HSE。 - 此函数会更新全局变量SystemCoreClock,并重新配置HAL_InitTick。 */ SystemClock_Config(); /* Event Recorder: - 可用于代码执行时间测量,MDK5.25及其以上版本才支持,IAR不支持。 - 默认不开启,如果要使能此选项,务必看V5开发板用户手册第8章 */ #if Enable_EventRecorder == 1 /* 初始化EventRecorder并开启 */ EventRecorderInitialize(EventRecordAll, 1U); EventRecorderStart(); #endif bsp_InitKey(); /* 按键初始化,要放在滴答定时器之前,因为按钮检测是通过滴答定时器扫描 */ bsp_InitTimer(); /* 初始化滴答定时器 */ bsp_InitUart(); /* 初始化串口 */ bsp_InitLed(); /* 初始化LED */ }
主功能:
主功能的实现主要分为两部分:
- 启动一个自动重装软件定时器,每100ms翻转一次LED1和LED2。
- 再启动一个自动重装软件定时器,每500ms翻转一次LED3和LED4。
/* ********************************************************************************************************* * 函 数 名: main * 功能说明: c程序入口 * 形 参: 无 * 返 回 值: 错误代码(无需处理) ********************************************************************************************************* */ int main(void) { bsp_Init(); /* 硬件初始化 */ PrintfLogo(); /* 打印例程名称和版本等信息 */ PrintfHelp(); /* 打印操作提示 */ /* 先做个LED1的亮灭显示 */ bsp_LedOn(1); bsp_DelayMS(100); bsp_LedOff(1); bsp_DelayMS(100); bsp_StartAutoTimer(0, 100); /* 启动1个100ms的自动重装的定时器 */ bsp_StartAutoTimer(1, 500); /* 启动1个500ms的自动重装的定时器 */ /* 进入主程序循环体 */ while (1) { bsp_Idle(); /* 这个函数在bsp.c文件。用户可以修改这个函数实现CPU休眠和喂狗 */ /* 判断定时器超时时间 */ if (bsp_CheckTimer(0)) { /* 每隔100ms 进来一次 */ bsp_LedToggle(1); } /* 判断定时器超时时间 */ if (bsp_CheckTimer(1)) { /* 每隔500ms 进来一次 */ bsp_LedToggle(2); bsp_LedToggle(3); bsp_LedToggle(4); } } }
18.8 实验例程说明(IAR)
配套例子:
V5-002_跑马灯
实验目的:
- 学习F407平台的跑马灯实现。
实验内容:
- 启动一个自动重装软件定时器,每100ms翻转一次LED1和LED2。
- 再启动一个自动重装软件定时器,每500ms翻转一次LED3和LED4。
上电后串口打印的信息:
波特率 115200,数据位 8,奇偶校验位无,停止位 1

程序设计:
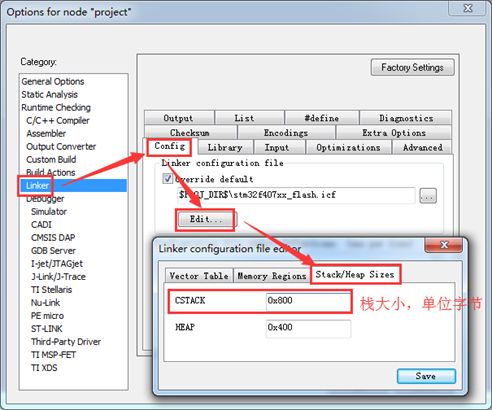
系统栈大小分配:
硬件外设初始化
硬件外设的初始化是在 bsp.c 文件实现:
/* ********************************************************************************************************* * 函 数 名: bsp_Init * 功能说明: 初始化所有的硬件设备。该函数配置CPU寄存器和外设的寄存器并初始化一些全局变量。只需要调用一次 * 形 参:无 * 返 回 值: 无 ********************************************************************************************************* */ void bsp_Init(void) { /* STM32H429 HAL 库初始化,此时系统用的还是F407自带的16MHz,HSI时钟: - 调用函数HAL_InitTick,初始化滴答时钟中断1ms。 - 设置NVIV优先级分组为4。 */ HAL_Init(); /* 配置系统时钟到168MHz - 切换使用HSE。 - 此函数会更新全局变量SystemCoreClock,并重新配置HAL_InitTick。 */ SystemClock_Config(); /* Event Recorder: - 可用于代码执行时间测量,MDK5.25及其以上版本才支持,IAR不支持。 - 默认不开启,如果要使能此选项,务必看V5开发板用户手册第8章 */ #if Enable_EventRecorder == 1 /* 初始化EventRecorder并开启 */ EventRecorderInitialize(EventRecordAll, 1U); EventRecorderStart(); #endif bsp_InitKey(); /* 按键初始化,要放在滴答定时器之前,因为按钮检测是通过滴答定时器扫描 */ bsp_InitTimer(); /* 初始化滴答定时器 */ bsp_InitUart(); /* 初始化串口 */ bsp_InitLed(); /* 初始化LED */ }
主功能:
主功能的实现主要分为两部分:
- 启动一个自动重装软件定时器,每100ms翻转一次LED1和LED2。
- 再启动一个自动重装软件定时器,每500ms翻转一次LED3和LED4。
/* ********************************************************************************************************* * 函 数 名: main * 功能说明: c程序入口 * 形 参: 无 * 返 回 值: 错误代码(无需处理) ********************************************************************************************************* */ int main(void) { bsp_Init(); /* 硬件初始化 */ PrintfLogo(); /* 打印例程名称和版本等信息 */ PrintfHelp(); /* 打印操作提示 */ /* 先做个LED1的亮灭显示 */ bsp_LedOn(1); bsp_DelayMS(100); bsp_LedOff(1); bsp_DelayMS(100); bsp_StartAutoTimer(0, 100); /* 启动1个100ms的自动重装的定时器 */ bsp_StartAutoTimer(1, 500); /* 启动1个500ms的自动重装的定时器 */ /* 进入主程序循环体 */ while (1) { bsp_Idle(); /* 这个函数在bsp.c文件。用户可以修改这个函数实现CPU休眠和喂狗 */ /* 判断定时器超时时间 */ if (bsp_CheckTimer(0)) { /* 每隔100ms 进来一次 */ bsp_LedToggle(1); } /* 判断定时器超时时间 */ if (bsp_CheckTimer(1)) { /* 每隔500ms 进来一次 */ bsp_LedToggle(2); bsp_LedToggle(3); bsp_LedToggle(4); } } }
18.9 总结
虽然是跑马灯的初级例程,但有必要掌握程序的基本设计框架,后面的例子都是建立在这个框架的基础上。建议初学者掌握好。