RT-Thread学习笔记——移植RT-Thread到STM32
前言
从本文开始,记录自己的RT-Thread学习笔记,基于STM32L475VET6讲解,相关开发板用RTT&正点原子的潘多拉IoT Board开发板。本文先从Nano开始学起,个人觉得对于初学者,还是先学会Nano的移植,把内核部分向学一遍,再去学组件和设备驱动以及其他的东西,这里包括RT-Thread的内核移植、FinSH移植,相关代码到GitHub下载:https://github.com/sanjaywu/STM32L475_PANDORA_RT-Thread_DEMO
一、获取裸机工程
1、裸机工程可到GitHub下载:https://github.com/sanjaywu/STM32L475_PANDORA_DEMO,下载完成之后,打开工程文件夹,可以发现如下文件:

2、接着我们把HARDWARE、SYSTEM和USMART这三个文件删除,HARDWARE文件夹是裸机的外设驱动,在讲解移植的时候不需要用到,SYSTEM文件夹有delay延时、串口驱动和相关类型宏定义,在移植RT-Thread的时候,我们会重新实现delay延时和串口驱动以及类型宏定义。
二、下载 RT-Thread Nano 源码
1、RT-Thread Master 的源码可从 RT-Thread GitHub 仓库下载,Nano 就是从里面扣出来的,去掉了一些组件和各种开发板的 BSP,保留了 OS的核心功能,但足够我们使用。RT-Thread 官方并没有将抠出来的Nano 放 到 他 们 的 官 方 网 站 , 而 是 作 为 一 个 Package 放 在 了 KEIL 网 站:http://www.keil.com/dd2/pack/,目前最新的是3.1.1版本,打开这条连接,然后拉到下面找到RT-Thread的Package:

2、点击箭头下载,弹出窗口点击OK,然后开始下载:
![]()
3、下载完成之后双击安装这个pack,安装的路径和你安装MDK5的时候是一样的,我安装的是默认路径。
4、安装完成之后,找到你安装MDK5的路径,然后按这个路径找到RT-Thread的源码:C:\Keil_v5\ARM\PACK\RealThread\RT-Thread\3.1.1:
三、往裸机工程添加 RT-Thread 源码
1、在前面下载好的裸机工程里,再新建一个文件夹为RT-Thread的,然后将上面下载好的Nano版源码拷贝到这个文件:
2、对于Nano源码各个文件内容删减:
(1)打开bsp,这里RT-Thread是放底层驱动的东西:
除了board.c和rtconfig.h这两个文件,其他都删除,然后再新建一个board.h头文件。
(2)打开components,RT-Thread组件放置的地方,只有一个finsh,保留它,这个finsh非常好用:
(3)打开libcpu —> arm,因为用的是STM32L4xx,是cortex-m4,所以只需保留cortex-m4即可,其它都删除:
(4)剩下的include和src文件设RT-Thread的头文件和内核源码,不能删除,保留完整。
(5)接着,新建一个文件夹来放设备驱动,命名device_drivers。这里为什么要用RT-Thread设备驱动呢,因为RT-Thread的finsh功能实现需要串口,这里就用先只设备驱动里面的串口驱动来实现,自己从RT-Thread的master版本中整理出来,代码可以看工程(https://github.com/sanjaywu/STM32L475_PANDORA_RT-Thread_DEMO)里面的,这样既能实现finsh也能实现rt_kprintf。当然你也可以自己写一个串口驱动,只不过后面一直finsh就会很麻烦,读写函数都要改掉,而且容易出错。

最终移植整理好之后,RT-Thread的文件如下:
四、修改rtconfig.h
#ifndef __RTTHREAD_CFG_H__
#define __RTTHREAD_CFG_H__
/* RT-Thread内核部分 */
#define RT_NAME_MAX 8 //内核对象名称最大长度,大于该长度的名称多余部分会被自动裁掉
#define RT_ALIGN_SIZE 4 //字节对齐时设定对齐的字节个数。常使用ALIGN(RT_ALIGN_SIZE)进行字节对齐
#define RT_THREAD_PRIORITY_MAX 32 //定义系统线程优先级数;通常用RT_THREAD_PRIORITY_MAX-1定义空闲线程的优先级
#define RT_TICK_PER_SECOND 1000 //定义时钟节拍,为1000时表示1000个tick每 秒,一个tick为1ms
#define RT_USING_OVERFLOW_CHECK //检查栈是否溢出,未定义则关闭
#define RT_DEBUG //定义该宏开启debug模式,未定义则关闭
#define RT_DEBUG_INIT 0 //开启debug模式时:该宏定义为0时表示关闭打印组件初始化信息,定义为1时表示启用
#define RT_DEBUG_THREAD 0 //开启debug模式时:该宏定义为0时表示关闭打印线程切换信息,定义为1时表示启用
#define RT_USING_HOOK //定义该宏表示开启钩子函数的使用,未定义则关闭
#define IDLE_THREAD_STACK_SIZE 256 //定义了空闲线程的栈大小
/*
线程间同步与通信部分,
该部分会使用到的对象有信号量、
互斥量、事件、邮箱、消息队列、信号等
*/
#define RT_USING_SEMAPHORE //定义该宏可开启信号量的使用,未定义则关闭
#define RT_USING_MUTEX //定义该宏可开启互斥量的使用,未定义则关闭
#define RT_USING_EVENT //定义该宏可开启事件集的使用,未定义则关闭
#define RT_USING_MAILBOX //定义该宏可开启邮箱的使用,未定义则关闭
#define RT_USING_MESSAGEQUEUE //定义该宏可开启消息队列的使用,未定义则关闭
#define RT_USING_SIGNALS //定义该宏可开启信号的使用,未定义则关 闭
/* 内存管理部分 */
#define RT_USING_MEMPOOL //定义该宏可开启静态内存池的使用,未定义则关闭
#define RT_USING_MEMHEAP //定义该宏可开启两个或以上内存堆拼接的使用,未定义则关闭
#define RT_USING_SMALL_MEM //定义该宏可开启开启小内存管理算法,未定义则关闭
//#define RT_USING_SLAB //定义该宏可开启SLAB内存管理算法,未定义则关闭
#define RT_USING_HEAP //定义该宏可开启堆的使用,未定义则关闭
/* 内核设备对象 */
#define RT_USING_DEVICE //表示开启了系统设备的使用,使用设备驱动
#define RT_USING_CONSOLE //定义该宏可开启系统控制台设备的使用,未定义则关闭
#define RT_CONSOLEBUF_SIZE 128 //定义控制台设备的缓冲区大小
#define RT_CONSOLE_DEVICE_NAME "uart1" //控制台设备的名称
/* 自动初始化方式 */
#define RT_USING_COMPONENTS_INIT //定义该宏开启自动初始化机制,未定义则关闭
#define RT_USING_USER_MAIN //定义该宏 启设置应用入口为main函数
#define RT_MAIN_THREAD_STACK_SIZE 2048 //定义main线程的栈大小
/* FinSH */
#define RT_USING_FINSH //定义该宏可开启系统FinSH调试工具的使用,未定义则关闭
#ifdef RT_USING_FINSH
#define FINSH_THREAD_NAME "tshell" //开启系统FinSH时:将该线程名称定义为tshell
#define FINSH_USING_HISTORY //开启系统FinSH时:使用历史命令
#define FINSH_HISTORY_LINES 5 //开启系统FinSH时:对历史命令行数的定义
#define FINSH_USING_SYMTAB //开启系统FinSH时:定义该宏开启使用Tab键,未定义则关闭
#define FINSH_THREAD_PRIORITY 20 //开启系统FinSH时:定义该线程的优先级
#define FINSH_THREAD_STACK_SIZE 4096 //开启系统FinSH时:定义该线程的栈大小
#define FINSH_CMD_SIZE 80 //开启系统FinSH时:定义命令字符长度
#define FINSH_USING_MSH //开启系统FinSH时:定义该宏开启MSH功能
#define FINSH_USING_MSH_DEFAULT //开启系统FinSH时:开启MSH功能时,定义该宏默认使用MSH功能
#define FINSH_USING_MSH_ONLY //开启系统FinSH时:定义该宏,仅使用MSH功能
#endif
/* 关于 MCU */
#define STM32L475VE //定义该工程使用的MCU为STM32L475VE
#define RT_HSE_VALUE 8000000 //定义时钟源频率
#define RT_USING_LED //定义该宏开启LED的使用
#define RT_USING_SERIAL //定义该宏开启串口的使用
#define BSP_USING_UART1 //定义该宏开启UART1的使用
#endif/* __RTTHREAD_CFG_H__ */
五、修改board.c
1、添加系统时钟初始函数,这里使用HAl库将系统初始化为80MHz:
void _Error_Handler(char *file, int line)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
while(1)
{
}
/* USER CODE END Error_Handler_Debug */
}
/*
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct;
RCC_ClkInitTypeDef RCC_ClkInitStruct;
__HAL_RCC_PWR_CLK_ENABLE();
/* Initializes the CPU, AHB and APB busses clocks */
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLM = 1;
RCC_OscInitStruct.PLL.PLLN = 20;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV7;
RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;
RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
/* Initializes the CPU, AHB and APB busses clocks */
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK | RCC_CLOCKTYPE_SYSCLK | RCC_CLOCKTYPE_PCLK1| RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
/* Configure the main internal regulator output voltage */
if (HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1) != HAL_OK)
{
_Error_Handler(__FILE__, __LINE__);
}
}2、修改Tick相关函数,初始化SysTick,:
/**
* HAL adaptation
*/
HAL_StatusTypeDef HAL_InitTick(uint32_t TickPriority)
{
/* Return function status */
return HAL_OK;
}
uint32_t HAL_GetTick(void)
{
return rt_tick_get() * 1000 / RT_TICK_PER_SECOND;
}
void HAL_SuspendTick(void)
{
return ;
}
void HAL_ResumeTick(void)
{
return ;
}
void HAL_Delay(__IO uint32_t Delay)
{
return ;
}
void SysTick_Handler(void)
{
/* enter interrupt */
rt_interrupt_enter();
rt_tick_increase();
/* leave interrupt */
rt_interrupt_leave();
}
3、修改rt_hw_board_init函数,初始化SysTick:
/**
* This function will initial your board.
*/
void rt_hw_board_init()
{
/* 使用HAL库,初始化HAL */
HAL_Init();
/* 初始化系统时钟和SysTick */
SystemClock_Config();
SysTick_Config(SystemCoreClock / RT_TICK_PER_SECOND);
/* 硬件 BSP 初始化统统放在这里,比如 LED,串口,LCD 等 */
#ifdef RT_USING_LED
led_init();
#endif
#ifdef RT_USING_SERIAL
stm32_hw_usart_init();
#endif
/* Call components board initial (use INIT_BOARD_EXPORT()) */
#ifdef RT_USING_COMPONENTS_INIT
rt_components_board_init();
#endif
#if defined(RT_USING_CONSOLE) && defined(RT_USING_DEVICE)
rt_console_set_device(RT_CONSOLE_DEVICE_NAME);
#endif
#if defined(RT_USING_USER_MAIN) && defined(RT_USING_HEAP)
rt_system_heap_init(rt_heap_begin_get(), rt_heap_end_get());
#endif
}
4、增加RT-Thread堆空间大小,因为finsh需要和其他线程需要,我这里先修改为16K,后期使用具体看MCU的RAM和实际需要调节:

六、新建MDK工程
1、新建一个BSP文件夹用于放自己写的外设驱动:

2、然后新建一个MDK工程,往工程里面加入相关文件,如下:

这里我们重点关注几个文件夹: BSP、RT-Thread_bsp、RT-Thread_device_drviers、RT-Thread_libcpu。
(1)BSP,放用户自己写的驱动,如LED驱动、LCD驱动等:
![]()
(2) RT-Thread_bsp:放RT-Thread做的BSP、board.c、board.h、rt_config.h,放RT-Thread做的BSP可以是串口驱动等:
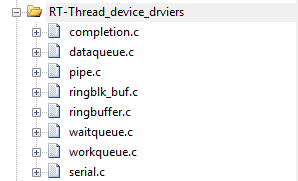
(3)RT-Thread_device_drviers:放RT-Thread的设备驱动框架,如串口、I2C、SPI等,我们目前只先用到串口:
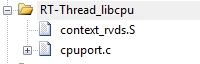
(4)RT-Thread_libcpu:放CPU 架构,我们用的是SMT32L4xx,因此这里是cortex-m4,在添加cpuport.c和context_rvds.S:
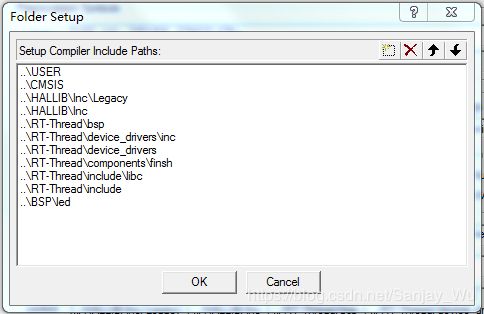
3、添加相关头文件到工程:
七、修改main.c
1、将main函数修改如下:
#include "main.h"
#include "board.h"
#include "rtthread.h"
int main(void)
{
u32 count = 1;
while(count > 0)
{
LED_R(0);
rt_kprintf("led on, count: %d\r\n", count);
rt_thread_mdelay(500);
LED_R(1);
rt_thread_mdelay(500);
rt_kprintf("led off\r\n");
count++;
}
return 0;
}
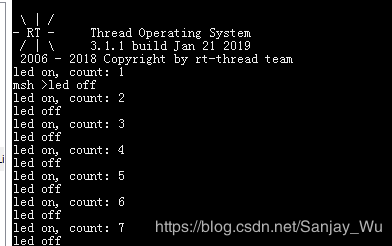
2、保存工程,然后编译工程,下载到开发板,观察LED灯情况,会亮500ms后再灭500ms,同时串口打印相关信息:
3、测试finsh功能:
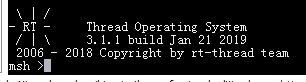
为更加直观看finsh相关功能,将main函数的串口打印代码注释掉,然后重新编译,下载到开发板:
#include "main.h"
#include "board.h"
#include "rtthread.h"
int main(void)
{
u32 count = 1;
while(count > 0)
{
LED_R(0);
//rt_kprintf("led on, count: %d\r\n", count);
rt_thread_mdelay(500);
LED_R(1);
rt_thread_mdelay(500);
//rt_kprintf("led off\r\n");
count++;
}
return 0;
}接着打开串口,打印如下信息:
按tab键:
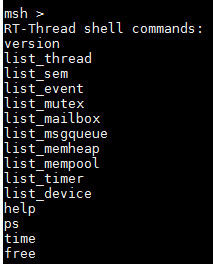
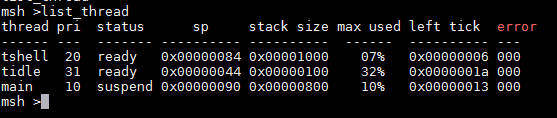
输入list_thread:
更多finsh的讲解到RT-Thread官方看相关文档。
八、RT-Thread 启动流程
当你拿到一个移植好的 RT-Thread 工程的时候,你去看 main 函数,只能在 main 函数里面看到创建线程和启动线程的代码,硬件初始化,系统初始化,启动调度器等信息都看不到。那是因为 RT-Thread 拓展了 main 函数,在 main 函数之前把这些工作都做好了。

1、在components.c中有如下代码:
/* $Sub$$main 函 数 */
int $Sub$$main(void)
{
rtthread_startup();
return 0;
}在这里 $Sub$$main 函数仅仅调用了 rtthread_startup() 函数,在 components.c 的代码中找到rtthread_startup() 函数,如下:
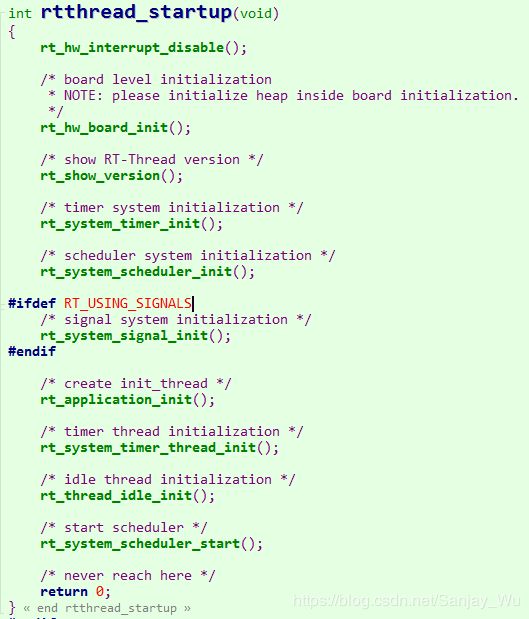
启动流程如下(图片来源RT-Thread编程指南):
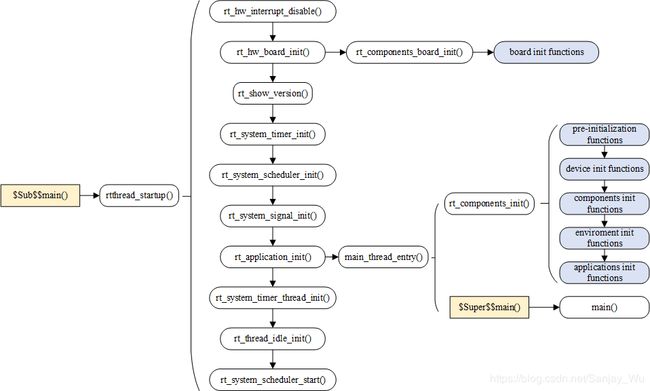 启动流程图——来源RT-Thread编程指南
启动流程图——来源RT-Thread编程指南
这部分启动代码,大致可以分为四个部分:
(1)初始化与系统相关的硬件;
(2)初始化系统内核对象,例如定时器、调度器、信号;
(3)创建 main 线程,在 main 线程中对各类模块依次进行初始化;
(4)初始化定时器线程、空闲线程,并启动调度器。
rt_hw_board_init() 中完成系统时钟设置,为系统提供心跳、串口初始化,将系统输入输出终端绑定到这个串口,后续系统运行信息就会从串口打印出来。
参考文献:
1、[野火®]《RT-Thread 内核实现与应用开发实战—基于STM32》
2、RT-THREAD 编程指南