论悬停技术,蜂鸟我是服气的,但蝙蝠有多努力你知道吗?
说起脊椎动物里的悬停高手,大家可能最先想到蜂鸟。它们可以将长长的喙扎进花里,扑棱着翅膀保持身体在半空中纹丝不动,摆出一副定心凝神吃到饱的姿态。

慢镜头下吸食花蜜的蜂鸟 | Lentink Lab, Stanford University
其实,除了蜂鸟,脊椎动物里还有另外一群鲜为人知的悬停高手——食蜜蝙蝠。不同于大多数人心中“吸血鬼”或“捕虫高手”的印象,这类蝙蝠更偏爱甜甜的花蜜。它们会飞到花朵前,把脸埋进花里,快速地伸缩舌头舔食花蜜。食蜜蝙蝠和蜂鸟一样,饮蜜时能通过扇动翅膀,使身体悬停在花朵旁不动。

悬停在空中的食蜜蝙蝠 | Glenn Barle
一边是蜂鸟轻盈的羽翼,另一边是蝙蝠薄薄的皮膜。这两种质感和结构完全不同的翅膀,居然能实现相似的悬停效果。那么,它们的发力机制是否相同?哪种翅膀的悬停效果更好、更省能量呢?
悬停高手,各显神通
为了探讨这些问题,来自斯坦福大学的博士生里弗斯·英格索尔(Rivers Ingersoll)等人来到了哥斯达黎加。这片属于新热带界的土地上,生活着不同种类的蜂鸟和食蜜蝙蝠。研究者们使用高分辨率空气动力学测力台(装有3D高速摄像装备),对蜂鸟和蝙蝠的悬停行为进行了分析。
研究者们发现,蜂鸟振翅的上下、前后幅度十分对称,整个振翅周期,翅膀扭转角度和伸缩幅度也较小,优雅轻松地完成了悬停过程。受力分析图显示,蜂鸟翅膀运动时平均倾斜7°,比较接近水平面,因此获得的净升力几乎垂直于水平面,可以有效地抵消自身重力。
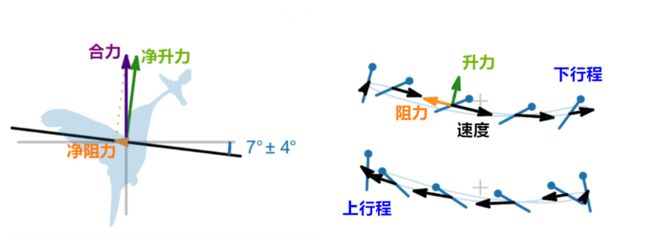
分析蜂鸟振翅时所产生的力 | 参考文献[1]
蜂鸟振翅时所产生的力(放慢100倍)| LentinkLab.
研究者们又给蜂鸟出了点难题:他们改变了花朵的角度。灵动的蜂鸟依然能通过调整身体和头部姿态,保持翅膀和水平面的夹角基本不变(因此获得的净升力也基本不减),轻松应对不同角度开放的花朵。

蜂鸟通过调整姿态,轻松应对不同角度开放的花朵 | 参考文献[1]
而食蜜蝙蝠的动作显然要夸张许多。由于在抬升翅膀时,来自空气的阻力向下,抬翅获得的升力较少。蝙蝠便减短了抬翅时间,整个振翅周期也不对称(有种猛烈抬起又慢慢放下的感觉)。
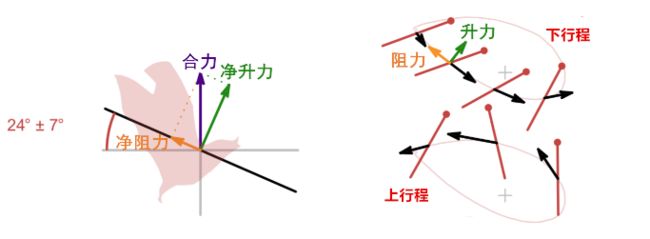
分析食蜜蝙蝠振翅时所产生的力 | 参考文献[1]
蝙蝠振翅时所产生的力(放慢100倍)| LentinkLab.
由于拍打翅膀幅度特别大,蝙蝠受到的空气阻力也变大了。聪明的蝙蝠用了两种方法来应对这个问题:
1. 减少阻力。蝙蝠在抬翅时,猛地将翅膀收缩35%(如下图D),减少“扇风”面积,有效降低了向下的阻力。
2. 利用阻力。蝙蝠悬停时,扇翅角度比蜂鸟大得多。因此翅膀在下落期间,受到斜向上的阻力,其中一部分阻力能用来抵消重力,颇有“借力打力”的意味。
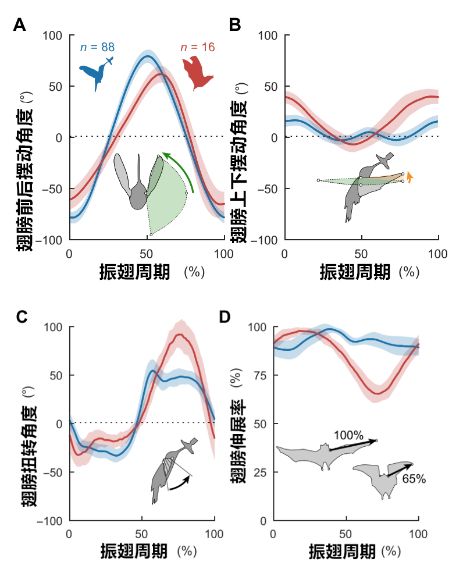
其中蓝线为蜂鸟,红线为蝙蝠 | 参考文献[1]
如此看来,在“寻蜜”道路上,蜂鸟和食蜜蝙蝠选择了完全不同的进化策略。蜂鸟肢体演化出了专门的功能:前肢(翅膀)用来飞翔,后肢(爪子)用来栖息。而蝙蝠前肢和后肢要同时用来撑开翼膜,这可能是它在抬翅时,获得升力较小的原因。于是它们演化出了更大的翅膀“扇出”更多升力,来减少振翅次数和能量损耗。
总之,蜂鸟在本轮对决中更胜一筹。可怜食蜜蝙蝠这么努力,悬停效率还是没有赶上蜂鸟。
仿生飞行器
人们早就注意到了蜂鸟和蝙蝠的飞行方式,这启发了迷你仿生飞行器的制作。
2011年,美国国防部高级研究计划局投资AeroVironment公司,研发出了纳米蜂鸟:

AeroVironment公司研发的纳米蜂鸟 | 参考文献[2]
这款纳米蜂鸟翼展160毫米,重量还比不上一节5号电池。它能被远程遥控,并配有侦查摄像机,飞行和悬停能力都十分出色。它小巧的身形可以在狭窄空间中穿行,完成搜索救援、环境监测等工作。
仿生蝙蝠微型飞行器也很有特色。2017年,伊利诺伊大学厄巴纳-香槟分校协作科学研究实验室,研制仿生蝙蝠飞行器:骨架为轻巧的合金材质;机翼采用硅基薄膜,与传统覆盖织物相比,硅基薄膜具有更好的折叠、拉伸性能,模拟了蝙蝠翅膀皮膜的特性,可以适应不同风力环境。比起庞大、吵闹的重型无人机,这款仿生蝙蝠飞行器在执行任务时,对人们影响会小很多。
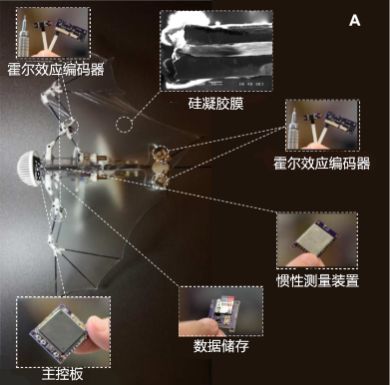
仿生蝙蝠微型飞行器的主要结构 | 参考文献[3]
如此看来,斯坦福大学关于蜂鸟和蝙蝠的研究,不仅深度挖掘了两种动物的悬停机制,也为此类仿生飞行器的制作提供了更多思路。
以后的演化道路上,食蜜蝙蝠的悬停效率能否提高,我们不得而知。不过如何提升仿生飞行器的各项性能,就是我们人类可以努力的事情啦。
作者:悲催的铊宝宝
编辑:Yuki
排版:雷颖
题图来源:Wikimedia Commons
参考文献:
[1] R. Ingersoll, L. Haizmann, D. Lentink, Biomechanics of hover performance in Neotropical hummingbirds versus bats. Sci. Adv. 4, eaat2980 (2018).
[2] https://en.wikipedia.org/wiki/AeroVironment_Nano_Hummingbird
[3] A. Ramezani, S.-J. Chung, S. Hutchinson, A biomimetic robotic platform to study flight specializations of bats. Sci. Robot. 2, eaal2505 (2017).

本文版权属于“我是科学家”,未经授权不得转载。如需转载请联系[email protected]
