蓝桥杯比赛培训笔记(基于STCCT107D训练板)
“蓝桥杯”比赛培训笔记
更新说明
第一次大更新:删除了一部分冗余的代码,将代码部分改得更为规范了些。
——2020年2月23日
第二次更新:在C语言相关中增添了“数组”及“指针”的部分知识点。
——2020年3月18日
第三次大更新:在C语言相关中增添了“sprintf函数”的部分知识点;增添了运用sprintf函数完成数码管显示及左移操作的代码,增添了利用定时器中断完成数码管动态扫描的代码,增添了目录并对一些文章阅读的细节进行了优化,增添了“代码块阅读说明”;对代码块内一些有小bug的代码进行了修复。
——2020年3月30日
第四次大更新:在C语言相关中增添了“DS1302实时时钟”、“DS18B20温度测量”、“I2C协议通信”和“长时操作和短时操作”的相关知识点;增添了DS1302实时时钟和DS18B20温度测量的相关代码;对所有代码的注释进行了优化,更方便阅读;优化了字体大小。
——2020年4月22日
第五次小更新:更正了C语言相关中“DS1302部分”和“sprintf”函数部分的错误和不当的描述。
DS1302部分:
错误语句:DS1302的数据是以压缩BCD码的格式输出的(初始化数据的写入格式则是非压缩BCD码)
正确语句:DS1302的数据是以压缩BCD码的格式输出的(初始化数据的写入格式也是压缩BCD码)
sprintf函数部分:
错误语句:该函数为标准输入输出函数,包含于“stdio.h”头文件中,其作用是将输入数字格式化为字符形式输出至字符串中。
正确语句:该函数为标准输入输出函数,包含于“stdio.h”头文件中,不严谨地说,其作用是将输入数字格式化为字符形式输出至字符串中。
——2020年4月29日
第六次小更新:在C语言相关中增添了“PCF8591”芯片的相关知识点;简化了所有代码中键盘消抖的部分;将所有代码中“int main(void)…return 0;”形式改为了“void main(void)…”形式,消除了“unreachable code”的警告。
——2020年6月18日
第七次小更新:在C语言相关中修改了“sprintf”函数相关说明部分,增添了新的使用技巧,增添了一些解释和示例代码,更方便读者理解;修改了“循环左/右移”部分,增添了“intrins.h”头文件中循环左/右移函数的声明及使用说明,对一些细节部分进行了优化。
——2020年6月19日
第八次大更新:在C语言相关中增添了“AT24C02”芯片的相关知识点。
寄语:蓝桥杯省赛已结束,我就是在AT24C02上栽跟头的,没怎么练习这个模块,希望大家引以为戒,一定要把所有模块好好掌握,每个模块至少编程3遍才行!加油!
——2020年7月5日
目录
- “蓝桥杯”比赛培训笔记
- 更新说明
- 单片机的工作模式
- C语言相关
- 数组
- 指针
- sprintf函数
- 间断长时操作和短时操作
- 循环左/右移
- 数码管动态扫描原理
- 数码管闪烁
- 按键抖动
- 矩阵键盘
- DS1302实时时钟
- DS18B20温度测量
- I2C协议通信
- PCF8591
- AT24C02
- 实验代码
- 代码部分阅读说明
- LED灯
- LED灯实验一 ↓
- LED灯实验二 ↓
- LED灯实验三 ↓
- LED灯实验四 ↓
- LED灯实验五 ↓
- 数码管
- 动态扫描显示0~7 ↓
- 指定数码管闪烁 ↓
- 按键综合
- 独立键盘(常用方法) ↓
- 独立键盘(简化方法) ↓
- 用按键切换不同的数码管闪烁 ↓
- 矩阵键盘(复杂方法) ↓
- 矩阵键盘(简化方法) ↓
- 定时器
- 利用定时器中断计时 ↓
- 利用sprintf函数完成数码管左移及显示 ↓
- Ds1302实时时钟
- 实时时钟的显示 ↓
- main.c主文件
- Ds1302.h头文件
- Ds1302.c驱动文件
- Ds18b20温度传感器
- 实时温度的测量 ↓
- main.c主文件
- onewire.h头文件
- onewire.c驱动文件
单片机的工作模式
- AB先传送地址,DB再传送数据。
- 地址确定后,需要根据芯片M74HC573M1R的原理锁存DB信号,即让38译码器选中Y0输出口(注意YnC=(Yn’+WR’)’)。
原理如下:
While the LE input is held at a high level, the Q outputs will follow the data input precisely. When LE is taken low, the Q outputs will be latched precisely at the logic level of D input data.
即LE为高电平不锁存,低电平锁存。
注意:
当短接帽接至“IO”口时,使用的“IO模式”需要手动锁存地址。当短接帽接至“MM”口时,使用的“MM模式”可借助“XBYTE”命令(一定要大写)自动锁存地址。
C语言相关
数组
数组计算元素的个数是从“1”开始计算的,但是,选择元素时数组则是从“0”开始计算。
例如:Example [ 3 ] = { a , b , c } ;
Example数组共有3个元素,其中“a”为第0个元素,“b”为第1个元素,“c”为第2个元素。
利用初始化器初始化:利用初始化器进行数组初始化:
int a[8]={[6]=12};//把数组a中的第6个元素初始化为12,其余都为0。
注意:①如果初始化器后面有更多的值,那么就那些值就会被初始化在其之后。②后面的初始化会覆盖前面的初始化。
int a[8]={1,2,[4]=7,7,7,[0]=3};//其结果是a[8]={3,2,0,0,7,7,7,0};
指针
“*p”表示地址为p存储单元的内容;“p”表示地址;“&a”表示取a的地址;a为变量。
int *p;//初始化指针,但是该指针无指向地址!如果直接使用会有问题。
int *p=&a;//初始化指针,该形式只在定义时正确,表示以p指针所指向地址的值为变量a的值。
p=&a;//表示指针p所指向的地址就是a的地址。即地址间的赋值。
*p=a;//表示指针p所指向地址的内容就是内容a。
在C中,指针一定要初始化,指针加1指的是增加一个存储单元。对数组而言,这意味着把加1后的地址是下一个元素的地址,而不是下一个字节的地址,这是为什么必须声明指针所指向对象类型的原因之一。
sprintf函数
该函数为标准输入输出函数,包含于“stdio.h”函数中,不严谨的说,其作用是将输入的量(可为数字,可为字符)转为字符形式输出至字符串中,其输出格式和语法等都与“printf”函数一样,故可利用此函数实现许多功能。
但在使用时,若输入的量为数字型,则需注意C51编译器和C语言编译器的区别,因C51编译器十分“节省”,故需要加一个“unsigned int”进行强制转换,详情可看之后代码部分的注释。
大概格式如下:
sprintf(字符串地址,“占位符(可加上其他字符)”,(unsigned int)需要转换数字);
示例代码如下:
unsigned char zfsz[9];//第九个字符为“\0”,用来存放由sprintf函数自动加上的字符串结束标志。
unsigned int num=5555;
sprintf(zfsz,”QWQ %d”,(unsigned int)num);
此时字符数组里的内容应如下:
zfsz={‘Q’,‘W’,‘Q’,‘ ’,‘5’,‘5’,‘5’,‘5’};
若输入的量不是数字,而是字符,则不需要加“unsigned int”强制转换,但需要注意占位符“%d”要改为“%c”。
大概格式如下:
sprintf(字符串地址,“%c(可加上其他字符)”,字符量);
示例代码如下:
unsigned char zfsz[9]; //第九个字符为“\0”,用来存放由sprintf函数自动加上的字符串结束标志。
unsigned char wenzi=’a’;
sprintf(zfsz,”^_^ …%c”,wenzi);
此时字符数组里的内容应如下:
zfsz={‘^’,‘_’,‘^’,‘ ’,‘.’,‘.’,‘.’,‘a’};
间断长时操作和短时操作
长时操作:如让灯亮1秒,灭1秒。元件动作的同时也在计时。工作模式类似于数码管动态扫描。格式:动作(时段1)→停止(时段2)→动作(时段1)→停止(时段2)…
例如:
//代码实现的功能是根据jg(间隔)的值让LED灯亮jg秒、灭jg秒。
//jg通过按键控制赋予其不同的值。
unsigned int cjsj;//采集时间参数。
unsigned char cjsjfz;//采集时间辅助参数。
void T0_Ser(void) interrupt 1
{
cjsj++;//开始计时。
if(jg==60)//因为60s的计算超出了65536的范围,因此另外处理。
{
if((cjsj<60000)&&(cjsjfz==0))
XBYTE[0x8000]=0;//LED灯亮。
else if((cjsj<60000)&&(cjsjfz==1))
XBYTE[0x8000]=0xff;//LED灯灭。
if(cjsj>=60000)
{
cjsj=0;//初始化cjsj。
cjsjfz++;//同时将cjsjfz加一,即让下次计时与上次计时区分开来。
}
if(cjsjfz==2)
cjsjfz=0;//初始化cjsjfz参数。
}
else if((jg==1)||(jg==5)||(jg==30))//如果jg不为60s,则用常用的方法处理即可。
{
if(cjsj<1000*jg)//前1秒亮灯。
XBYTE[0x8000]=0;
else if((cjsj>=1000*jg)&&(cjsj<2000*jg))//后一秒灭灯。
XBYTE[0x8000]=0xff;
else if(cjsj>=2000*jg)
cjsj=0;//初始化cjsj参数。
}
}
短时操作:如,每隔1s对温度进行一次采样。注意,采样这个动作的时间是极短的,可以看作为瞬时的。先计时,元件再动作,且元件动作的时间极短,可看作元件动作时不计时。格式:计时→动作(时刻1)→计时→动作(时刻1)…
例如:
//代码实现的功能为每隔jg(间隔)秒,对环境温度进行一次采样并存储采样数据。
//jg通过按键控制赋予其不同的值。
void T0_Ser(void) interrupt 1 //T0中断服务函数。
{
if(zt==1)//进入采集温度状态,开始采集温度。
{
cjsj++;//当进入采集温度数据界面时,开始计时。
if((cjsj>=1000*jg)&&(wdgs<10))//当cjsj(采集时间)达到jg设置的时间时,执行以下操作。
{
wdhc[wdgs]=wd;//将温度数据传递给wdhc(温度缓存)数组。
cjsj=0;//cjsj清零,进行下一轮计时。
wdgs++;//wdhc数组地址序号wdgs(温度个数)加1,数组等待下一次赋值。
}
if(wdgs>=10)//当wdgs(温度数据个数)等于10个时,执行以下操作。
{
zt=2;//工作状态切换至状态2。
wdgs=0;//同时将wdgs初始化,方便进行下一轮测温。
}
}
}
总结,在对某个器件编写间断动作的代码时,一定要分清元件是进行长时动作还是短时动作,否则会出现辛辛苦苦编出来的代码并不符合要求的情况。且在编写代码时,一定要注意变量的类型大小,不可溢出。
循环左/右移
循环左/右移功能,在keil 5自带的intrins.h头文件中有相关的函数,但在keil 5中无法找到其对相关函数的定义,着实可惜。
打开头文件,可看到如下声明:
extern unsigned char _cror_ (unsigned char, unsigned char);//8位循环右移
extern unsigned int _iror_ (unsigned int, unsigned char);//16位循环右移
extern unsigned long _lror_ (unsigned long, unsigned char);//32位循环右移
extern unsigned char _crol_ (unsigned char, unsigned char);//8位循环左移
extern unsigned int _irol_ (unsigned int, unsigned char);//16位循环左移
extern unsigned long _lrol_ (unsigned long, unsigned char);//32位循环左移
函数使用方式为(以_cror_为例):
_cror_(被移动的8位变量,需移动的位数);
而以下是我参照网上代码写的左/右移函数,在此给各位读者做参考,以方便理解intrins.h头文件里左/右移函数。
/*循环左移*/
unsigned rol(unsigned val, int size)
{
unsigned res = val << size;
res |= val >> (32 - size);
return res;
}
/*循环右移*/
unsigned ror(unsigned val, int size)
{
unsigned res = val >> size;
res |= val << (32 - size);
return res;
}
//其中的“32”为int的位数,若需修改数据类型,以此类推。
数码管动态扫描原理
片选信号以一个极高的频率在不同数码管之间不断切换,通过利用人眼的暂留效应,让数码管“全部显示”。
工作的一般模式为:全灭→管1亮→全灭→管2亮… (发光二极管有余辉效应,因此要消隐全灭)
如此反复。消隐全灭不需要延迟时间。
注意:
在代码中,段选语句不需要延迟时间(若需加,一定要小于片选语句的延迟时间),但是,其一定嵌在“全灭”片选语句和“切换”片选语句之间。
例如:
for(i=0;i<8;i++)//循环显示全部数码管。
{
XBYTE[0xE000]=0xff;//段选信号初始化。
XBYTE[0xC000]=0;//片选信号初始化,片选信号的“全灭”语句。
XBYTE[0xE000]=smg_Dxdata[i];//段选信号的“切换”语句。
XBYTE[0xC000]=smg_Pxdata[i];//片选信号的“切换”语句。
Delay10us();“切换”片选语句的延迟时间。
}
数码管闪烁
根据数码管动态扫描的原理,每个i都对应着一片数码管,因此,可以根据i的值来选中数码管。当i为特定值时,再让数码管消隐,即可控制指定数码管消隐。同时再用另一个变量(如times)来控制数码管消隐的时间即可。
简而言之,就是使用if语句,将i和times相与作为条件(如(i==1)&&(times<125))),判断是否需要进入数码管消隐语句块。
注意:
当指定数码管消隐时,别忘记其他未指定的数码管需要正常显示。具体请看代码中的注释。
例如:
for(i=0;i<8;i++)
{
XBYTE[0XE000]=0xff;//数码管消隐,段选信号。
XBYTE[0xC000]=0;//数码管消隐,片选信号。
XBYTE[0xE000]=smg_Dxdata[i];//段选信号不变,通过只改变片选信号让数码管闪烁。
if(times<125)//循环的次数,当小于125次时,选中的数码管消隐。
{
if((i>5)||(i<2)||((i==4)||(i==3)))//选中需要闪烁的数码管。
{
XBYTE[0xC000]=0;//消隐选中的数码管。
}
else
XBYTE[0xC000]=smg_Pxdata[i];//让其他数码管照常显示。
}
else
XBYTE[0xC000]=smg_Pxdata[i];//当大于125次时,所有数码管都照常显示。
Delay1ms();//数码管动态扫描延迟时间。
}
times++;//完成一次循环后,times加1。
if(times==250)//当times=250时,初始化times的值。
times=0;
按键抖动
按键按下去时有两个时间段存在抖动,分别在刚按下去的时候和松开按键的时候。所以,为了保证按键功能稳定,需要去两次抖动。
例如:
if(key==0)
{
Delay10ms;//刚按下去时进行延时防抖,第一次去抖动。
if(key==0)
{
segment1;//按下去后的相关功能模块。
while(!key);//此处括号里内容可替换为“key==0”。等待按键释放,或判断按键是否释放。
// Delay10ms;//刚松手时进行延时防抖,第二次去抖动。
// while(!key);//判断按键是否完全释放。
segment2;//按键释放之后的相关功能模块。
}
}
/*/while 循环的条件是值为1,而其中key的值为0,因此“while(key);”语句等同于“while(0);”,是不循环的。所以对key取非,值为1,可循环,即“while(!key)”等同于“while(1)”。补充,当括号内为式子时,式子成立则为1,不成立则为0。
被注释的语句在实际编程中可以省略,省略之后也可消抖,目前尚不清楚原因。在代码中,除“独立键盘(常用方法)”未省略,其他键盘程序代码均已省略。
矩阵键盘
可参照独立键盘的编程思路,进而推理出矩阵键盘的代码。矩阵键盘可分为行扫描和列扫描(当然二者差不多)。思路和独立键盘一样,独立键盘只有一列,而矩阵键盘有四列,因此只是需要加一个条件去判断到底是哪列(或哪行)的按键按下了。
简而言之,基本原理就是8个端口只让1个端口赋值为低电平,任一按键按下,一定会有另1个端口被拉为低电平。
代码过长且复杂,为方便理解,便不在此赘述,其相关说明在“实验代码”部分中以注释的形式写出。
DS1302实时时钟
DS1302可以显示日期、星期、时间等。在使用DS1302前,先要初始化,写入初始时间等数据并启动,然后再读出实时时间数据即可。在DS1302有关日历、时间的寄存器里,每个单位都有各自的读地址和写地址。进行相关操作时,都要先传输地址。此外,在DS1302中,还有一个写保护位,在对DS1302进行任何写操作之前,都必须要解锁写保护,操作完毕后也必须要重锁写保护。
当从DS1302中读出时钟数据时,务必注意,DS1302的数据是以压缩BCD码的格式输出的(初始化数据的写入格式也是压缩BCD码)。一般情况下,要对读出的数据进行解压和转换,通常将1个字节的数据解压为2个字节。当读地址顺序为时、分、秒时,转换压缩BCD码应秉承“时低秒高”“十低个高”的原则,即在数组中,“时”的数据应放在数组低地址上,“秒”的数据应放在数组的高地址上。在只对一个单位进行转换时(如:秒),应该将秒的十位放至低字节,个位应放至高字节。
例如:
void RTC_Init(void)//DS1302初始化函数。
{
Write_Ds1302(0x8e,0);//解锁写保护。
Write_Ds1302(0x84,0x23);//时。
Write_Ds1302(0x82,0x59);//分。
Write_Ds1302(0x80,0x50);//秒。
Write_Ds1302(0x8e,0x80);//锁定写保护。
}
void RTC_Read(void)//DS1302时间读取函数。
{
unsigned char rr1,rr2,temp;//rr1、rr2是循环参数,temp是临时缓存时间数据参数。
for(rr1=0;rr1<3;rr1++)//从DS1302中读取并转换时、分、秒时间数据。
{
/*当DS1302读地址的顺序为时、分、秒时,转换数据的原则为“时低秒高”“十低个高”,即在数组中,转换
顺序为时~秒,即时→低地址,秒→高地址;且在转换单个时间单位时,即十位→低字节,个位→高字节。*/
temp=Read_Ds1302(RTC_Adr[rr1]);//读取数据。
bcdzh[rr1*3]=(temp&0xf0)>>4;//转换十位。
bcdzh[rr1*3+1]=temp&0x0f;//转换个位。
}
for(rr2=0;rr2<8;rr2++)
{
//将时间数据输入zfhc(字符缓存)数组,进而显示至数码管上。
sprintf(zfhc+rr2,"%u",(unsigned int)bcdzh[rr2]);
}
}
DS18B20温度测量
DS18B20是一个单总线通信的温度测量芯片,其通信方式十分便捷。其可通过单总线获取电源,也可通过VDD引脚外接一个电源,更加详细的介绍请参看芯片手册。
DS18B20的事件序列为:初始化→写入命令:ROM命令(紧跟任何数据交换请求)→写入命令:功能命令(紧跟任何数据交换请求)。单总线上的所有事件都必须以初始化开始。当从DS18B20中读出数据时,需要注意温度数据格式的转换,其读出的温度数据为2个字节,且首先读出的数据为温度的低字节数据,其次才是温度的高字节数据。虽然蓝桥杯官方会给出DS18B20的驱动程序,但用户仍要自己编写一部分驱动代码。
用户可通过配置暂存寄存器调整测温精度(即每一个二进制位代表的温度),可分别调为0.5℃、0.25℃、0.125℃、0.0625℃。DS18B20输出的温度数据格式为16进制,需转换为十进制数,再乘以分辨率才能得到温度实际值(负数是以补码形式输出,需要将输出的数据进行取反再+1的换算),转换时务必要分清浮点数和整型数!必要时可采取“1元=100分”类似的方法来避免浮点数的计算。
例如:
//以下部分为所需编写的驱动代码。
unsigned int rd_temperature(void)//务必注意函数的类型。
{
unsigned char low,high;//分别用于存储温度数据的低字节和高字节。
unsigned int temperature;//最终返回值。
init_ds18b20();//初始化。
Write_DS18B20(0xcc);//ROM命令——跳过ROM。
Write_DS18B20(0x44);//对温度进行模数转换。
//Delay_OneWire(1000);//延时,等待转换完成,一般情况下可删除。
init_ds18b20();
Write_DS18B20(0xcc);
Write_DS18B20(0xbe);//读取RAM里温度暂存寄存器的数据。
low=Read_DS18B20();//低字节数据传输给low。
high=Read_DS18B20();//高字节数据传输给high。
temperature=high;//①整合。将2个字节的char类型数据整合成1个int类型的数据。
temperature<<=8;//②整合。
temperature|=low;//③整合。
return temperature;//将数据返回给上层函数。
}
//以下为测量转换温度的程序。
//方式一。
void get_Temperature(void)//获取实际温度数据函数。
{
unsigned int rt;//rt(real temperature)用于存放实际的温度。
//从ds18b20中读取温度数据,保留2位小数,因室内温度一般都高于0度,故此处不判断温度的正负。
rt=rd_temperature();
sprintf(zfhc,"%4.2f",rt/16.0);//除“16.0”就是乘以0.0625,“.0”一定要加!
}
//方式二。采取了“1元=100分”类似的方法进行温度转换。
void get_Temperature(void)//获取实际温度数据函数。
{
unsigned int rt;//rt(real temperature)用于存放实际的温度。
//从ds18b20中读取温度数据,保留2位小数,因室内温度一般都高于0度,故此处不判断温度的正负。
rt=rd_temperature()*0.0625*100;
sprintf(zfhc,"%8u",(unsigned int)rt);//加“8”是为了让数码管显示的字符靠右对齐。
}
I2C协议通信
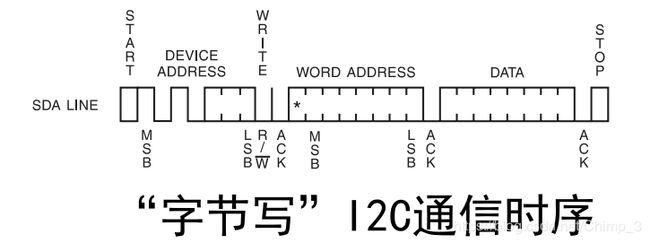
写通信格式:
单字节:主机发送起始位→主机发送元件片选写字节信号→等待从机回应→主机发送写地址→等待从机回应→主机发送第一个字节→等待从机回应→主机发送终止位
多字节:主机发送起始位→主机发送元件片选写字节信号→等待从机回应→主机发送写地址→等待从机回应→主机发送第一个字节→等待从机回应→主机发送第二个字节→等待从机回应→…→主机发送终止位
读通信格式:
单字节:主机发送起始位→主机发送元件片选写字节信号→等待从机回应→主机发送读地址→等待从机回应→主机发送起始位→主机发送元件片选读字节信号→等待从机回应→主机接收第一个字节→主机不响应从机→主机发送终止位
多字节:主机发送起始位→主机发送元件片选写字节信号→等待从机回应→主机发送读地址→等待从机回应→主机发送起始位→主机发送元件片选读字节信号→等待从机回应→主机接收第一个字节→主机响应从机→主机接收第二个字节→主机响应从机→…→主机不响应从机→主机发送停止位
注意:①请尽量将I2C通信程序放入中断服务程序中,否则中断会干扰I2C协议的通信!②若无法将I2C通信程序放入中断服务程序中,请务必要在I2C协议通信时关闭中断,以尽可能减小中断对I2C协议的影响。③有的使用I2C协议的芯片需要一定时间的缓冲,请务必在芯片缓冲完毕后再进行下一轮通信。如AT24C02芯片,每次写一字节需5ms的时间,这5ms即为缓冲时间。
PCF8591
PCF8591是一个兼A/D、D/A转换功能为一体的8位精度的芯片,其最多可接8个同类芯片。PCF8591的A/D转换原理为逐次逼近式,具有4个模拟量输入通道(可通过编程选择单端或差分输入)。其与单片机的交流方式为I2C通信,A/D转换后的数字量输出以及D/A转换时的数字量输入,均通过I2C通信传输。更多详细资料请参看数据手册。
使用PCF8591的步骤可简要概括如下:①发送PCF8591片选信号字。②发送控制字。③(D/A转换)发送数字量;(A/D转换)接收数字量。以上步骤为简略步骤,具体使用时,务必注意I2C协议的通信特点。
片选信号字:该字节分为固定部分和可编程部分,高4位为固定部分(1001),低四位为可编程部分,其中,D0为读/写位,D1、D2、D3位为芯片片选信号位(根据外部硬件A0、A1、A2接线图来确定),一般情况下,若只有一个PCF8591,A0、A1、A2直接接地,故D1、D2、D3位都为0。
控制字:发送到PCF8591的第二个字节将被存储到控制寄存器,用于控制器件功能。D7和D3位为固定位,恒为0;D6位为D/A和A/D转换功能的选择位,0为A/D转换,1为D/A转换;D5和D4位为模拟量四种输入方式的选择位;D2位为通道自动增加位,为1,芯片每次A/D转换后自动将通道号+1,选择下一个通道,为0则恒保持一个通道;D1和D0位则为通道输出选择位。
D/A转换输入字:发送给PCF8591的第三个字节将被存储至DAC数据寄存器,并使用片上D/A转换器转换成对应的模拟电压。
例如:
void adzh(void)
{
IIC_Start();//主机发送起始位。
IIC_SendByte(0x90);//主机发送PCF8591芯片片选及写信号。
IIC_WaitAck();//等待从机响应。
IIC_SendByte(0x03);//主机发送控制字,模式:D/A转换,输入方式单端输入,输出通道3。
IIC_WaitAck();//等待从机响应。
IIC_Start();//主机发送起始位。
IIC_SendByte(0x91);//主机发送PCF8591芯片片选及读信号。
IIC_WaitAck();等待从机响应。
v=IIC_RecByte();//主机接收电压数字量数据。
IIC_SendAck(1);//主机发送“无应答”信号。
IIC_Stop();//结束通信。
v=(5*v/256)*100;//换算成实际电压的100倍,方便显示。
sprintf(zfhc,"u%3d",(u16)v);//将电压输入字符缓存数组,用于数码管显示。
}
AT24C02
AT24C02的使用方法类似于PCF8591,因为它们都是采用I2C通信协议。
AT24C02提供2048位串行电可擦除和可编程只读存储器(EEPROM),其大小为256个字节,每个字节8位。 该装置低功耗和低压操作应用于各种场合。通过两线串行接口访问,使用I2C与单片机通信。其还具有一个写保护引脚,当该引脚接高电平时,禁止对AT24C02进行写操作,低电平则允许写操作。更多详细资料请参看数据手册。
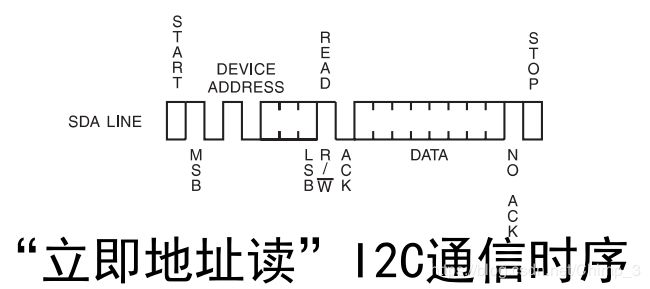
其有“字节写”和“页写”两种写入方式和“立即地址读”、“选择性读”和“连续读”三种读取方式。通过I2C是否应答来区分它们。
其与单片机通信过程可简要概括如下:①发送AT24C02芯片片选信号字。②发送地址。③写入数据/读出数据。
片选信号字:该字节分为固定部分和可编程部分,高4位为固定部分(1010),低四位为可编程部分,其中,D0为读/写位(低电平写,高电平读),D1、D2、D3位为芯片片选信号位(根据外部硬件A0、A1、A2接线图来确定),一般情况下,若只有一个AT24C02,A0、A1、A2直接接地,故D1、D2、D3位都为0。
写操作:不管是“字节写”还是“页写”,都需要传输一个存储地址给AT24C02,不同的是,对于“页写”方式来说,该地址为首地址。传输完地址后,在传输数据时,“字节写”在传输完一个字节后就等待从机回应并发送停止通信信号,而“页写”则在等待从机回应后再发送数据,每回应一次就再发送一个字节数据给AT24C02,最多可发送16字节数据,每次传输前从机都会把之前的地址+1,以接收新数据。
示例代码:
//字节写
void write_E2(void)//写入存储函数。
{
IIC_Start();
IIC_SendByte(0xa0);//选中AT24C02并选择写模式。
IIC_WaitAck();
IIC_SendByte(0);//输入写地址0x00。
IIC_WaitAck();
IIC_SendByte(0x34);//写入数据。
IIC_WaitAck();
IIC_Stop();
// Delayms(5);//可省略,写入至少需要5毫秒的时间。
}
//页写
void write_E2(void)//写入存储函数。
{
IIC_Start();
IIC_SendByte(0xa0);//选中AT24C02并选择写模式。
IIC_WaitAck();
IIC_SendByte(0);//输入写地址0x00。
IIC_WaitAck();
IIC_SendByte(0x34);//写入第1个数据。
IIC_WaitAck();
IIC_SendByte(0x35);//写入第2个数据。
IIC_WaitAck();
……
IIC_Stop();
// Delayms(5);//可省略,写入至少需要5毫秒的时间。
}

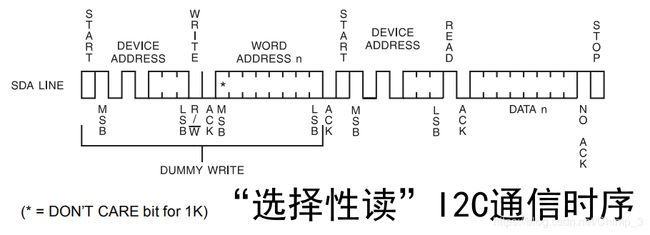
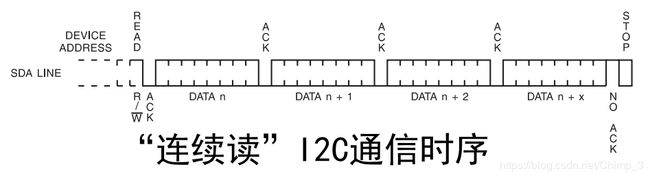
读操作:“立即地址读”时,不需要输入地址,直接读取1字节数据即可,地址默认为上次读/写操作的地址。“选择性读”时,则和PCF8591一样,需先写入地址,再读出1字节数据。“连续读”则是读取完一个字节后,主机发送一个“0”应答信号告诉从机需要更多数据,AT24C02则将地址+1,继续向主机发送数据,当地址达到最大后,AT24C02将会回到0地址,继续发送数据。需要注意的是,凡是读操作,在结束时,主机都需发送一个“1”不应答信号,再发送终止传输信号。
示例代码:
//立即地址读
void read_E2(void)//读取存储函数。
{
u8 tem;
IIC_Start();
IIC_SendByte(0xa1);//选中AT24C02并选择读模式。
IIC_WaitAck();
tem=IIC_RecByte();//读取设定的参数值。
IIC_SendAck(1);
IIC_Stop();
}
//选择性读
void read_E2(void)//读取存储函数。
{
u8 tem;
IIC_Start();
IIC_SendByte(0xa0);//选中AT24C02并选择写模式。
IIC_WaitAck();
IIC_SendByte(0);//输入读地址0x00。
IIC_WaitAck();
IIC_Start();
IIC_SendByte(0xa1);//选中AT24C02并选择读模式。
IIC_WaitAck();
tem=IIC_RecByte();//读取设定的参数值。
IIC_SendAck(1);
IIC_Stop();
}
//连续读
void read_E2(void)//读取存储函数。
{
u8 sz[8];
IIC_Start();
IIC_SendByte(0xa0);//选中AT24C02并选择写模式。
IIC_WaitAck();
IIC_SendByte(0);//输入读地址0x00。
IIC_WaitAck();
IIC_Start();
IIC_SendByte(0xa1);//选中AT24C02并选择读模式。
IIC_WaitAck();
sz[0]=IIC_RecByte();//读取设定的参数值。
IIC_SendAck(0);
sz[1]=IIC_RecByte();//读取设定的参数值。
IIC_SendAck(0);
sz[2]=IIC_RecByte();//读取设定的参数值。
IIC_SendAck(0);
…
IIC_SendAck(1);
IIC_Stop();
}
实验代码
代码部分阅读说明
一、下载代码时,请务必看清代码中单片机的时钟频率为多少,以免程序运行出错。
二、因笔记在不同时间段分多次完成,故有些代码中功能相同的函数会有一些区别。
三、在按键代码中,给P3口赋值以及“key”的赋值有两种写法:①“P3=0x0f”“key=P3”。②“P3|=0x0f”“key=(P3&0x0f)”。在此说明一下,②的写法是更为谨慎的写法,其使用了位运算符号“|=”,尽量保证了P3口的初始状态不变,防止在按键与其他元件共同使用该口时,因P3口状态改变而导致元件使用出错。但①的写法更方便读者理解按键消抖的原理,便未修改。
LED灯
LED灯实验一 ↓
//实验效果:所有LED灯同时点亮,并以每100毫秒亮一次的频率不断闪烁。
#includeLED灯实验二 ↓
//实验预期效果:8个led灯先依次点亮。
#includeLED灯实验三 ↓
/*实验预期效果:8个led灯先依次点亮,然后再分别2个、3个、4个、5个、6个、7个依次点亮;接着,再4个4个交
替闪烁5次,最后全部闪烁5次。*/
#includeLED灯实验四 ↓
/*实验预期效果:8个led灯先依次点亮,然后再分别2个、3个、4个、5个、6个、7个依次点亮;接着,再4个4个交
替闪烁5次,最后全部闪烁5次。*/
//该实验采用了部分地址译码的方式选中锁存器,故在下载程序至单片机上之前,短接帽J13需要短接至MM位置。
#includeLED灯实验五 ↓
//实验预期效果:LED灯逐颗逐颗点亮
//利用循环移位功能实现。
#include数码管
动态扫描显示0~7 ↓
//实验预期效果:数码管从左至右显示76543210。
#include指定数码管闪烁 ↓
//实验预期效果:数码管上从左至右第1、2、4、5、7、8片数码管以每秒一次的频率闪烁。
#include按键综合
独立键盘(常用方法) ↓
/*实验预期功能:数码管默认熄灭,按下S7键,最左边的数码管开始显示并+1,松开S7键,则显示0;按下S6键,数
码管开始-1,松开S6键,则会显示1。*/
#include独立键盘(简化方法) ↓
/*实验预期效果:依次按下S4,分别会出现:①LED全亮;②LED全灭;③蜂鸣器响;④继电器吸合;⑤蜂鸣器关闭;
⑥继电器关闭;⑦回到初始状态。按下S5,回到初始状态。S6、S7无功能。*/
//这是独立键盘的另外一种编程方式,该方式与矩阵键盘的方式相似。
#include用按键切换不同的数码管闪烁 ↓
/*实验预期效果:依次按下S6,从左至右,可以分别让第1、2片,第4、5片,第7、8片数码管闪烁;第四次按下,
数码管正常显示。*/
//这是独立键盘的另外一种编程方式,该方式与矩阵键盘的方式相似。
#include矩阵键盘(复杂方法) ↓
//实验预期效果:依次按下S4~S19,倒数第四个数码管会依次显示0~F。
//不足:除S4~S7外,剩下的按键在按下时都会出现消隐的情况。有时会出现按键与数码管的显示值不匹配的情况。
//注意:J5的短接帽一定要接到1、2口,即左边和中间。
#include矩阵键盘(简化方法) ↓
//实验预期效果:依次按下S4~S19,倒数第四个数码管会依次显示0~F。
//不足:所有按键在按下时那一刹那都会出现消隐的情况,若长按,数码管一直保持消隐状态,直至松手。
//注意:J5的短接帽一定要接到1、2口,即左边和中间。
#include定时器
利用定时器中断计时 ↓
/*实验预期效果:一上电,最右边三位数码管都亮,并且最后两位数码管从60开始减计时。减至0后,会从255开始
减。按S6键,可以更改计时方向,改为加计时。*/
//本实验采用了中断的方式进行计时,并且为方便计算,单片机频率设为12MHZ,务必注意。
#include利用sprintf函数完成数码管左移及显示 ↓
//实验预期效果:分别按下s4、s5、s6、s7,最右边两片数码管会显示9,10,11,12。
/*实验重点:①利用定时器进行数码管动态扫描,消除了之前按键按下就会消隐的缺陷。②利用了sprintf函数实现数
值的转换以及数字左移效果。*/
//左移效果:当9变成10时,1会左移至倒数第二片数码管上。
#include Ds1302实时时钟
实时时钟的显示 ↓
main.c主文件
//实验预期效果:上电后,数码管开始显示实时时间,从“21-15-21”开始计时。
//实验重点:利用sprintf函数转换段选信号执行数码管显示。
#include Ds1302.h头文件
//该文件蓝桥杯官方会下发。
#ifndef _ds1302_h
#define _ds1302_h
void Write_Ds1302(unsigned char temp);
void Write_Ds1302_Byte( unsigned char address,unsigned char dat );
unsigned char Read_Ds1302_Byte ( unsigned char address );
void Set_RTC(unsigned char* pucRtc);
void Read_RTC(unsigned char* pucRtc);
#endif
Ds1302.c驱动文件
//该文件蓝桥杯官方会下发。
#include Ds18b20温度传感器
实时温度的测量 ↓
main.c主文件
/*实验预期效果:方案一,右边四位数码管以“21-5”的格式实时显示实际温度,其中“-”为整数和小数的分割线;方
案二,右边三位数码管以“21.5”的格式实时显示实际温度(该方案将需修改的函数以注释的形式写在最后)。*/
/*实验重点:①sprintf函数的拓展用法,解决想要移位某片数码管的问题。如将“215”格式中的“5”右移一位,在之
前的位置加上“-”,变成“21-5”的格式。②通过“或”的位运算,将小数点加入,无需再创建数组。*/
#include onewire.h头文件
//该文件蓝桥杯官方会下发。
#ifndef __ONEWIRE_H
#define __ONEWIRE_H
unsigned int read_Temperature(void); //; ;
#endif
onewire.c驱动文件
//该文件蓝桥杯官方会下发。
/*
程序说明: 单总线驱动程序
软件环境: Keil uVision 4.10
硬件环境: CT107单片机综合实训平台(外部晶振12MHz) STC89C52RC单片机
日 期: 2011-8-9
*/
#include "stc15f2k60s2.h"
sbit DQ = P1^4; //单总线接口
//单总线延时函数
void Delay_OneWire(unsigned int t) //STC89C52RC——注:已修正适应IAP15F2K60系列芯片。
{
unsigned char x;
while(t--)
for(x=0;x<12;x++);
}
//通过单总线向DS18B20写一个字节
void Write_DS18B20(unsigned char dat)
{
unsigned char i;
for(i=0;i<8;i++)
{
DQ = 0;
DQ = dat&0x01;
Delay_OneWire(5);
DQ = 1;
dat >>= 1;
}
Delay_OneWire(5);
}
//从DS18B20读取一个字节
unsigned char Read_DS18B20(void)
{
unsigned char i;
unsigned char dat;
for(i=0;i<8;i++)
{
DQ = 0;
dat >>= 1;
DQ = 1;
if(DQ)
{
dat |= 0x80;
}
Delay_OneWire(5);
}
return dat;
}
//DS18B20设备初始化
bit init_DS18b20(void)
{
bit initflag = 0;
DQ = 1;
Delay_OneWire(12);
DQ = 0;
Delay_OneWire(80);
DQ = 1;
Delay_OneWire(10);
initflag = DQ;
Delay_OneWire(5);
return initflag;
}
unsigned int read_Temperature(void)
{
unsigned char low,high;
unsigned int sum;
init_DS18b20();//初始化DS18B20。
Write_DS18B20(0xCC);//因只有一个元件,可跳过ROM存储识别。
Write_DS18B20(0X44);//对温度进行模数转换。
Delay_OneWire(4000);
init_DS18b20();//初始化DS18B20。
Write_DS18B20(0xCC);//因只有一个元件,可跳过ROM存储识别。
Write_DS18B20(0XBE);//读取温度暂存器。
low=Read_DS18B20();//温度数据的低字节暂存于low中。
high=Read_DS18B20();//温度数据的高字节暂存于low中。
sum=high;
sum<<=8;
sum|=low;
return sum;//将数据返回给上层函数。
}