Python进行有限元编程-平面应力问题(三节点三角形单元)
参考书籍是:《有限元方法基础教程》(国际单位制)(第五版)
章节为:第6章 建立平面应力和平面应变刚度方程
重要的事情继续强调(有限元的基本计算流程):
Step 1: 选择单元类型。
Step 2: 选择位移函数。
Step 3: 定义应变/位移和 应力/应变关系。
Step 4: 推导单元刚度矩阵和方程。
Step 5: 组合单元刚度方程得出总体方程并引进边界条件。
Step 6: 求解未知自由度。
Step 7:求解单元应变和应力。
Step 8: 解释结果。
==> 关于三节点三角形单元的刚度矩阵的推导过程,详见《有限元方法基础教程》第6章 建立平面应力和平面应变刚度方程
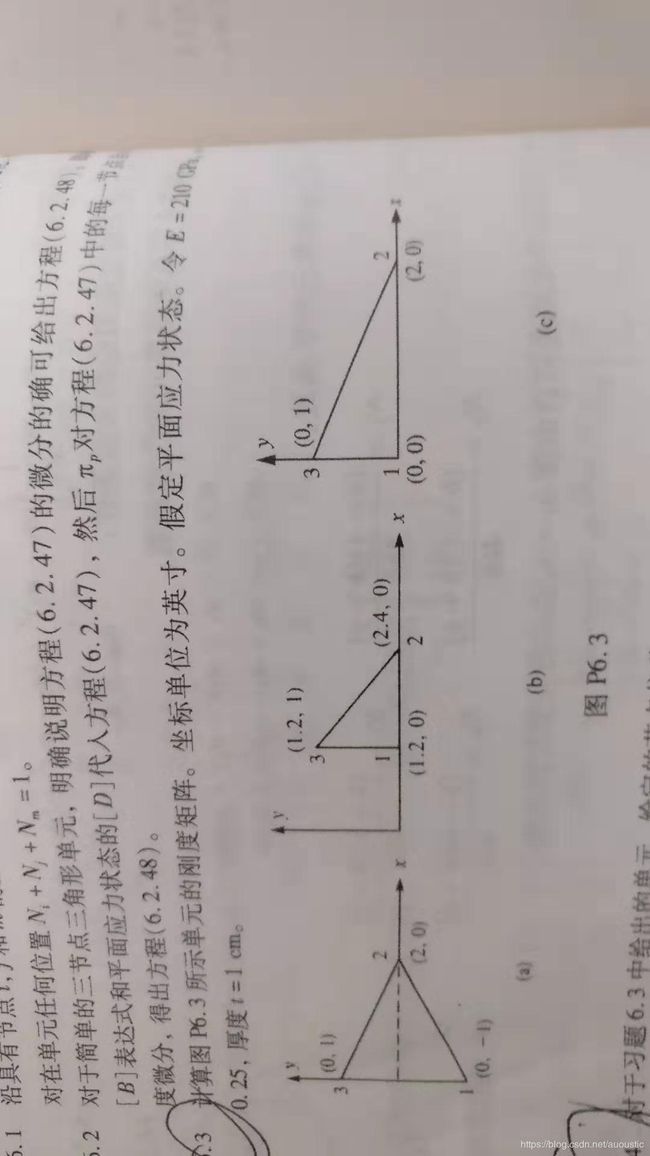
==> 本次主要计算的问题见上图。
==> 首先创建一个单元类。
==> 关于python中的构造函数(__init__方法)(因为之前学习java程序,java程序有一个构造函数的说法)传入的参数包括:三节点的坐标,和杨氏模量,泊松比,以及单元的厚度。(单元的面积是根据节点的坐标计算出来的)
import numpy as np
class T3(object):
# 接下来首先创建类的构造函数 __init__
# 对传入的参数进行说明,需要传入单元节点的坐标数据 coordinates
# 传入材料的杨氏模量E; 材料的泊松比 v
# 单元的厚度 t.
def __init__(self, coors, E, v, t):
self.coors = coors
self.E = E
self.v = v
self.t = t
self.B = None
self.D = None
self.A = None
在初始化中,我们给当前单元增加了B矩阵,D矩阵,A(单元面积)作为当前单元类的属性(attribute)。
==> 首先计算出对应的B矩阵,B矩阵的推导公式见《有限元方法基础教程》。(B矩阵是由N矩阵求偏导得来的)。
def Bmat(self):
# coors中的数据排列规则是 x_i, x_j, x_m, y_i, y_j, y_m
x_i, x_j, x_m, y_i, y_j, y_m = self.coors
# 首先计算出当前对应的行列式
A2 = x_i * (y_j - y_m) + x_j*(y_m - y_i) + x_m*(y_i - y_j)
# 然后计算生成对应的a_i, a_j, a_m
a_i = x_j * y_m - y_j * x_m
a_j = y_i * x_m - x_i * y_m
a_m = x_i * y_j - y_i * x_j
# 计算生成对应的beta
b_i = y_j - y_m
b_j = y_m - y_i
b_m = y_i - y_j
# 计算生成对应的r_i, r_j, r_m
r_i = x_m - x_j
r_j = x_i - x_m
r_m = x_j - x_i
# 然后将上述的所有的数据组合成B矩阵
B = np.zeros((3, 6), dtype=np.float32)
B[0][0] = b_i
B[0][2] = b_j
B[0][4] = b_m
# 然后添加r数据
B[1][1] = r_i
B[1][3] = r_j
B[1][5] = r_m
# 然后下面添加对应的b和r数据
B[2][0] = r_i
B[2][1] = b_i
B[2][2] = r_j
B[2][3] = b_j
B[2][4] = r_m
B[2][5] = b_m
return A2/2, B/A2
此处不仅计算出了B矩阵,还有当前单元的面积。这在单元刚度矩阵的公式中仍有应用。
==> 接下来是计算出对应的D矩阵,D矩阵是应力,应变关系的矩阵,本文主要是针对平面应力问题(注意区分平面应力问题和平面应变问题,两者最主要的区别,可以按照如下的规则:在3D问题中的,当有一个方向上的尺寸远小于另外两个方向上的尺寸时,可将该问题简化为平面应力问题;当有一个方向上的尺寸远大于另外两个方向上的尺寸时,可将该问题简化为平面应变问题)
# 接下来创建一个函数,来生成对应的D矩阵
def Dmat(self):
# 对于三角形三节点的,生成的D矩阵是3*3
D = np.array([[1, self.v, 0],
[self.v, 1, 0],
[0, 0, (1-self.v)/2]])
return D * self.E / (1 - self.v**2)
==> 对应于三节点三角形单元,其对应的单元刚度矩阵的表达式可以写为如下形式:
【k】= 【B】^T * 【D】 * 【B】 * t * A;
==>这里我们需要计算B矩阵的转置矩阵,可以调用numpy中对于矩阵的转置操作; 也可以自己添加转置操作。
def transpose(self, target:(list, np.ndarray)):
# 首先把target包装成np.ndarray
if isinstance(target, list):
target = np.array(target)
# 然后创建一个新的数据内存
Tmat = np.zeros((target.shape[1], target.shape[0]), dtype=np.float32)
# 然后给Tmat进行遍历赋值
for row in range(target.shape[0]):
for col in range(target.shape[1]):
Tmat[col][row] = target[row][col]
return Tmat
接下来创建一个生成单元刚度矩阵的函数。
def stiffness_Matrix(self):
# 这里我么首先需要获取B矩阵
if self.B == None or self.A == None:
A, B = self.Bmat()
self.A = A
self.B = B
# 接下来获取对应的转置矩阵B_T
B_T = self.transpose(self.B)
# 然后获取D矩阵
if self.D == None:
D = self.Dmat()
self.D = D
# 首先进行B_T矩阵与D矩阵的相乘
# 创建一个内存空间
Mat_1 = np.zeros((B_T.shape[0], self.D.shape[1]), dtype=np.float32)
# 创建一个临时求和变量
sum_value = 0
# 然后接下来便是来计算出对应的数值
for row in range(B_T.shape[0]):
for col in range(self.D.shape[1]):
sum_value = 0
for n in range(B_T.shape[1]):
sum_value += B_T[row][n] * self.D[n][col]
else:
# 迭代结束后,当前位置的数据便计算完成了
Mat_1[row][col] = sum_value
# 循环结束后,当前的矩阵相乘便计算完毕了
# 接下来继续处理Mat_1矩阵和B矩阵相乘的计算过程
# 开辟内存空间
Mat_2 = np.zeros((Mat_1.shape[0], self.B.shape[1]), dtype=np.float32)
for row in range(Mat_1.shape[0]):
for col in range(self.B.shape[1]):
sum_value = 0
for n in range(Mat_1.shape[1]):
sum_value += Mat_1[row][n] * self.B[n][col]
else:
Mat_2[row][col] = sum_value
# 矩阵乘积结束之后,需要做的是去乘t
return Mat_2 * self.t * A
==> 将上述问题的坐标信息输入到程序中去,得到对应的单元刚度矩阵。

对比书上的课后答案如下:
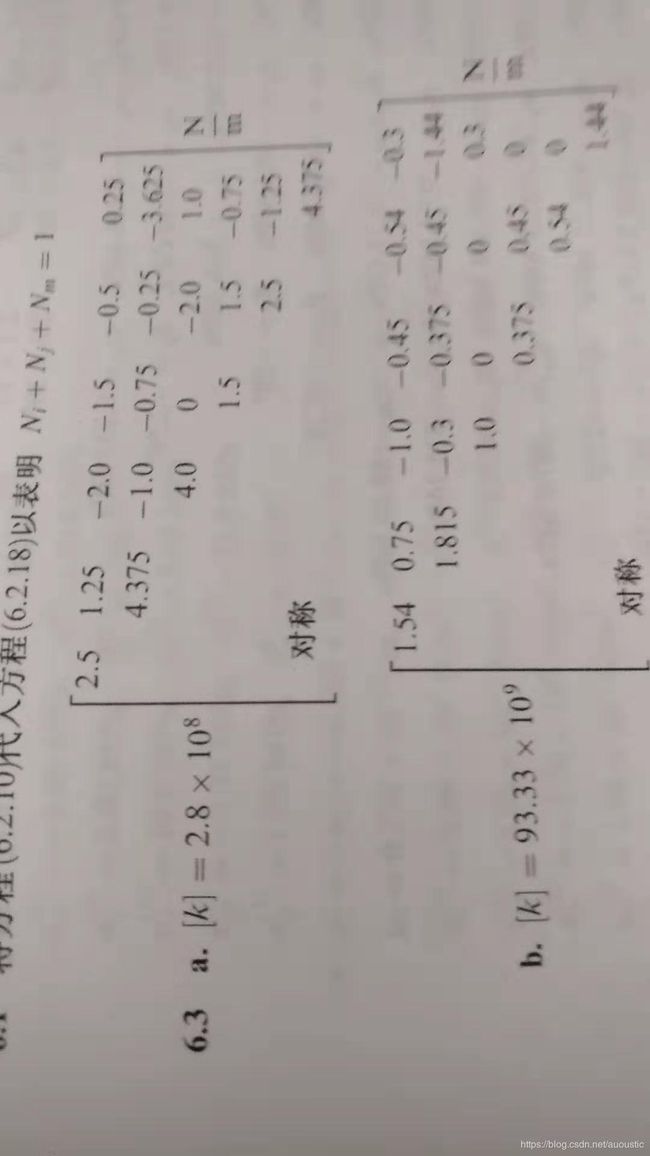
扶贫方式如下:

