从零开始丨INDEMIND双目视觉惯性模组ROS平台ORB-SLAM教程及记录
本文涉及很多代码及文字,排版、文字错误请见谅。
阅读时间预计30分钟
本文涉及图像、数据均由INDEMIND双目视觉惯性模组采集
文章涉及所有代码修改皆已上传至Github,大家自行修改后可对比参照
下载链接:Github
文章目录
- 一:环境介绍
- 二:下载SDK及ORB-SLAM源码
- 三:修改源码
- 1 . 源码路径
- 2 . 修改stereo_euroc.cc文件
- 1)将其橙色区域改成
- 2)添加时间转换函数
- 3)删除LoadImages函数
- 4)添加回调函数imagelCallback
- 5)添加show_ORB函数
- 6)ros初始化
- 7)删除 LoadImages函数
- 3 . 新建FileYaml.h文件
- 4 . 新建FileYaml.cc文件
- 5 . 修改CMakeLists.txt文件
- 1)
- 2)
- 3)
- 4)
- 5)
- 6. 编译
- 1)
- 7. 执行
- 1)
- 2)
- 3)
一:环境介绍
系统:Ubuntu 16.04 ROS
ORB依赖库:Pangolin、OpenCV、Eigen3、DBoW2、g2o,ros
二:下载SDK及ORB-SLAM源码
下载地址:
SDK:http://indemind.cn/sdk.html
ORB-SLAM:https://github.com/raulmur/ORB_SLAM2
三:修改源码
1 . 源码路径
下载好SDK之后,进入SDK-Linux/demo_ros/src目录。将下载好源码的放在该目录下,并对其改名,改为 ORB_SLAM
2 . 修改stereo_euroc.cc文件
进入ORB_SLAM2/Examples/Stereo目录下,修改stereo_euroc.cc文件。
1)将其橙色区域改成

代码如下:
#include
#include
#include
#include
#include
#include
#include
#include "ros/ros.h"
#include
#include
#include "std_msgs/String.h"
#include "FileYaml.h"
#include
#include
#include
#include
using namespace std;
ros::Subscriber image_l_sub;
ros::Subscriber image_r_sub;
int image_l_count = 0;
queue que_image_l;
queue que_image_r;
queue que_stamp;
std::mutex limage_mutex;
std::mutex rimage_mutex;
std::condition_variable left_data_cond;
std::condition_variable right_data_cond;
// std::lock_guardlock(rimage_mutex);
// std::thread show_thread{show_image}; //visualization thread
// show_thread.detach();
cv::Mat imLeft;
cv::Mat imRight;
ros::Time ros_stamp;
long double stamp;
修改后如下:

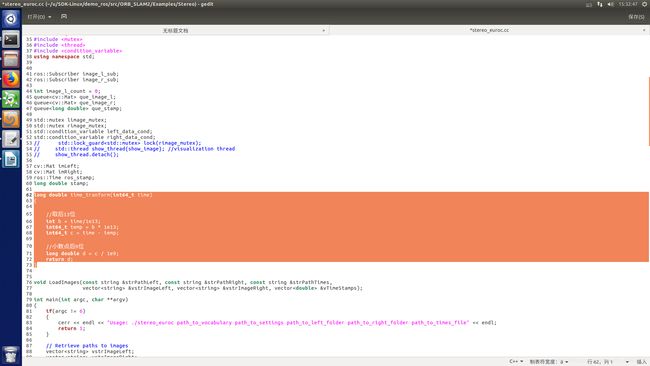
2)添加时间转换函数
在代码,long double stamp;后添加时间转换函数
long double time_tranform(int64_t time)
{
//取后13位
int b = time/1e13;
int64_t temp = b * 1e13;
int64_t c = time - temp;
//小数点后9位
long double d = c / 1e9;
return d;
}
修改后如下:
3)删除LoadImages函数

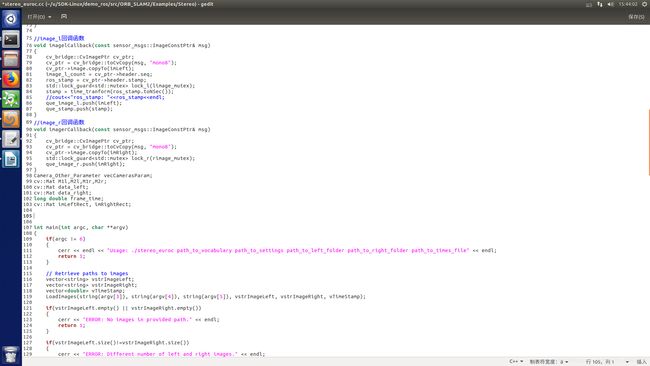
4)添加回调函数imagelCallback
在time_tranform和main函数之间添加左图回调函数imagelCallback,添加右图回调函数imagerCallback,以及一些变量的定义

代码如下:
//image_l回调函数
void imagelCallback(const sensor_msgs::ImageConstPtr&msg)
{
cv_bridge::CvImagePtr cv_ptr;
cv_ptr = cv_bridge::toCvCopy(msg, "mono8");
cv_ptr->image.copyTo(imLeft);
image_l_count = cv_ptr->header.seq;
ros_stamp = cv_ptr->header.stamp;
std::lock_guard lock_l(limage_mutex);
stamp = time_tranform(ros_stamp.toNSec());
//cout<<"ros_stamp: "<image.copyTo(imRight);
std::lock_guard lock_r(rimage_mutex);
que_image_r.push(imRight);
}
Camera_Other_Parameter vecCamerasParam;
cv::Mat M1l,M2l,M1r,M2r;
cv::Mat data_left;
cv::Mat data_right;
long double frame_time;
cv::Mat imLeftRect, imRightRect;
5)添加show_ORB函数
在cv::Mat imLeftRect, imRightRect;之后,添加show_ORB函数,用于获取图像数据和时间,以及启动ORB的功能
代码如下:
void show_ORB()
{
//-----------------ORB_SLAM2 Init---------------------------------------------
const string param1_ORBvoc = "Vocabulary/ORBvoc.txt";
const string param3_ORByaml = "Examples/Stereo/EuRoC.yaml";
ORB_SLAM2::System SLAM(param1_ORBvoc,param3_ORByaml,ORB_SLAM2::System::STEREO,true);
std::this_thread::sleep_for(std::chrono::milliseconds(500));
while(true)
{
std::this_thread::sleep_for(std::chrono::milliseconds(30));
std::unique_lock lock_l(limage_mutex);
data_left = que_image_l.front();
frame_time = que_stamp.front();
que_image_l.pop();
que_stamp.pop();
lock_l.unlock();
std::unique_lock lock_r(rimage_mutex);
data_right = que_image_r.front();
que_image_r.pop();
lock_r.unlock();
// cout.precision(13);
// cout<<"frame: "< >(t2 - t1).count();
// Wait to load the next frame
double T = 0;
T = que_stamp.front() - frame_time;
if(ttrack < T)
usleep((T-ttrack)*1e6);
/*
cv::imshow("left",data_left);
cv::imshow("right",data_right);
cv::waitKey(1);*/
}
// Stop all threads
SLAM.Shutdown();
// Save camera trajectory
SLAM.SaveTrajectoryTUM("CameraTrajectory.txt");
修改后如下:

6)ros初始化
将main函数内的内容全部删除,在main函数内添加ros初始化,读取配置文件,去畸变,获取参数,校正,ORB_SLAM的启动
代码如下:
ros::init(argc,argv,"ORB_SLAM2");
ros::NodeHandle n;
image_l_sub = n.subscribe("/module/image_left",100,imagelCallback);
image_r_sub = n.subscribe("/module/image_right", 100,imagerCallback);
const char *param2_SDKyaml = "/home/indemind/u/SDK-Linux-ros/lib/1604/headset.yaml";
readConfig(param2_SDKyaml,vecCamerasParam);
//-----------------fisheye rectify---------------------------------------------
cv::Mat Q;
if(vecCamerasParam.K_l.empty() || vecCamerasParam.K_r.empty() || vecCamerasParam.P_l.empty() || vecCamerasParam.P_r.empty() || vecCamerasParam.R_l.empty() ||
vecCamerasParam.R_r.empty() || vecCamerasParam.D_l.empty() || vecCamerasParam.D_r.empty() || vecCamerasParam.rows==0 || vecCamerasParam.cols==0)
{
cerr << "ERROR: Calibration parameters to rectify stereo are missing!" << endl;
return -1;
}
cv::fisheye::initUndistortRectifyMap(vecCamerasParam.K_l,vecCamerasParam.D_l,vecCamerasParam.R_l,vecCamerasParam.P_l.rowRange(0,3).colRange(0,3),
cv::Size(vecCamerasParam.cols,vecCamerasParam.rows),CV_32FC1,M1l,M2l);
cv::fisheye::initUndistortRectifyMap(vecCamerasParam.K_r,vecCamerasParam.D_r,vecCamerasParam.R_r,vecCamerasParam.P_r.rowRange(0,3).colRange(0,3),
cv::Size(vecCamerasParam.cols,vecCamerasParam.rows),CV_32FC1,M1r,M2r);
cout << "the P_l of initUndistortRectifyMap after" << endl;
for(int i = 0;i < 3;++i)
for(int j = 0;j < 3;++j)
{
double *ptr = vecCamerasParam.P_l.ptr(i,j);
cout << *ptr<(i,j);
cout << *ptr< 修改后如下:
7)删除 LoadImages函数
文件修改完成!
3 . 新建FileYaml.h文件
进入SDK-Linux/demo_ros/src/ORB_SLAM2/include目录下,新建FileYaml.h文件,将下列代码填入文件:
#ifndef _FILEYAML_H
#define _FILEYAML_H
#include
#include
using namespace std;
#include
#include
#include
#include
#include
#include
#include
#include
#include
using namespace cv;
using namespace Eigen;
using namespace Sophus;
using cv::FileStorage;
using cv::FileNode;
struct Camera
{
Eigen::Matrix4d T_SC;
Eigen::Vector2d imageDimension;
Eigen::VectorXd distortionCoefficients;
Eigen::Vector2d focalLength;
Eigen::Vector2d principalPoint;
std::string distortionType;
Camera() :
T_SC(Eigen::Matrix4d::Identity()),
imageDimension(Eigen::Vector2d(1280, 800)),
distortionCoefficients(Eigen::Vector2d(0, 0)),
focalLength(Eigen::Vector2d(700, 700)),
principalPoint(Eigen::Vector2d(640, 400)),
distortionType("equidistant")
{
}
void write(FileStorage& fs) const //Write serialization for this class
{
fs << "{:";
fs << "T_SC";
fs << "[:";
for (int i = 0; i < 4; i++)
{
for (int j = 0; j < 4; j++)
{
fs << T_SC(i, j);
}
}
fs << "]";
fs << "image_dimension";
fs << "[:";
fs << imageDimension(0) << imageDimension(1);
fs << "]";
fs << "distortion_coefficients";
fs << "[:";
for (int i = 0; i < distortionCoefficients.rows(); i++)
{
fs << distortionCoefficients(i);
}
fs << "]";
fs << "distortion_type" << distortionType;
fs << "focal_length";
fs << "[:";
fs << focalLength(0) << focalLength(1);
fs << "]";
fs << "principal_point";
fs << "[:";
fs << principalPoint(0) << principalPoint(1);
fs << "]";
fs << "}";
}
void read(const FileNode& node) //Read serialization for this class
{
cv::FileNode T_SC_node = node["T_SC"];
cv::FileNode imageDimensionNode = node["image_dimension"];
cv::FileNode distortionCoefficientNode = node["distortion_coefficients"];
cv::FileNode focalLengthNode = node["focal_length"];
cv::FileNode principalPointNode = node["principal_point"];
// extrinsics
T_SC << T_SC_node[0], T_SC_node[1], T_SC_node[2], T_SC_node[3], T_SC_node[4], T_SC_node[5], T_SC_node[6], T_SC_node[7], T_SC_node[8], T_SC_node[9], T_SC_node[10], T_SC_node[11], T_SC_node[12], T_SC_node[13], T_SC_node[14], T_SC_node[15];
imageDimension << imageDimensionNode[0], imageDimensionNode[1];
distortionCoefficients.resize(distortionCoefficientNode.size());
for (size_t i = 0; i 注:该文件为读取文件的头文件
4 . 新建FileYaml.cc文件
进入SDK-Linux/demo_ros/src/ORB_SLAM2/src目录下,新建FileYaml.cc文件,将下列代码填入文件:
#include "FileYaml.h"
static void write(FileStorage& fs, const std::string&, const Camera& x)
{
x.write(fs);
}
static void read(const FileNode& node, Camera& x, const Camera& default_value = Camera())
{
if (node.empty())
x = default_value;
else
x.read(node);
}
void readConfig(const char *yamlPath,Camera_Other_Parameter &vecCamerasOtherParam)
{
std::vector vecCameras;
cv::FileStorage fin(yamlPath, cv::FileStorage::READ);
if(!fin.isOpened())
{
cerr << endl << "Failed to load readConfig yamlPath " << endl;
return ;
}
cv::FileNode cameras_node = fin["cameras"];
/*
cv::FileNode Rl_node = fin["Rl"];
cv::FileNode Rr_node = fin["Rr"];
cv::FileNode Pl_node = fin["Pl"];
cv::FileNode Pr_node = fin["Pr"];
cv::FileNode Kl_node = fin["Kl"];
cv::FileNode Kr_node = fin["Kr"];
cv::FileNode Dl_node = fin["Dl"];
cv::FileNode Dr_node = fin["Dr"];*/
fin["Rl"] >> vecCamerasOtherParam.R_l;
fin["Rr"] >> vecCamerasOtherParam.R_r;
fin["Pl"] >> vecCamerasOtherParam.P_l;
fin["Pr"] >> vecCamerasOtherParam.P_r;
fin["Kl"] >> vecCamerasOtherParam.K_l;
fin["Kr"] >> vecCamerasOtherParam.K_r;
fin["Dl"] >> vecCamerasOtherParam.D_l;
fin["Dr"] >> vecCamerasOtherParam.D_r;
/*
vecCamerasOtherParam.R_l = Rl_node.mat();
vecCamerasOtherParam.R_r = Rr_node.mat();
vecCamerasOtherParam.P_l = Pl_node.mat();
vecCamerasOtherParam.P_r = Pr_node.mat();
vecCamerasOtherParam.K_l = Kl_node.mat();
vecCamerasOtherParam.K_r = Kr_node.mat();
vecCamerasOtherParam.D_l = Dl_node.mat();
vecCamerasOtherParam.D_r = Dr_node.mat();*/
for (cv::FileNodeIterator it = cameras_node.begin(); it != cameras_node.end(); it++)
{
Camera camera;
(*it) >> camera;
vecCameras.push_back(camera);
}
//obtain col & row
vecCamerasOtherParam.cols = vecCameras[0].imageDimension(0);
vecCamerasOtherParam.rows = vecCameras[0].imageDimension(1);
//obtain R & t
Eigen::Matrix4d T_SC_left;
Eigen::Matrix4d T_SC_right;
T_SC_left = vecCameras[0].T_SC;
T_SC_right = vecCameras[1].T_SC;
SE3 T_SC_l(T_SC_left.topLeftCorner(3,3),T_SC_left.topRightCorner(3,1));
SE3 T_SC_r(T_SC_right.topLeftCorner(3,3),T_SC_right.topRightCorner(3,1));
SE3 Tcl_cr = T_SC_l.inverse()*T_SC_r;
SE3 Tcr_cl = T_SC_r.inverse()*T_SC_l;
Matrix3d R = Tcr_cl.rotation_matrix();
Vector3d t = Tcr_cl.translation();
//Eigen tranfer to array
double * R_ptr= new double[R.size()];
double *t_ptr = new double[t.size()];
Map(R_ptr, R.rows(), R.cols()) = R;
Map(t_ptr, t.rows(), t.cols()) = t;
cout<<"R_matrix"< 注:该文件为读取文件的源文件
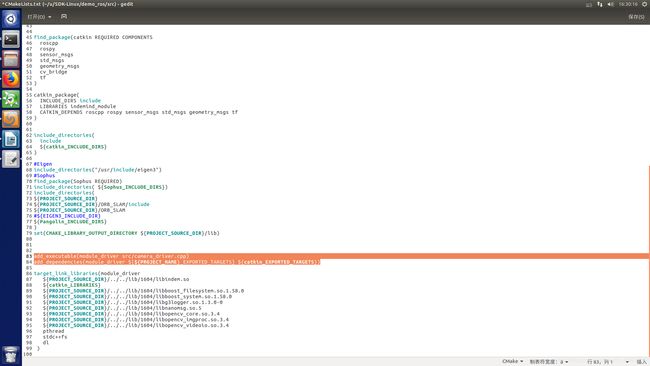
5 . 修改CMakeLists.txt文件
进入SDK-Linux/demo_ros/src目录下,修改CMakeLists.txt文件
将ORB中的CMakeLists.txt添加到SDK的CMakeLists.txt下,修改如下:
1)
在add_compile_options(-std=c++11)后面添加
IF(NOT CMAKE_BUILD_TYPE)
SET(CMAKE_BUILD_TYPE Release)
ENDIF()
MESSAGE("Build type: " ${CMAKE_BUILD_TYPE})
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -Wall -O3 -march=native ")
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -Wall -O3 -march=native")
# Check C++11 or C++0x support
include(CheckCXXCompilerFlag)
CHECK_CXX_COMPILER_FLAG("-std=c++11" COMPILER_SUPPORTS_CXX11)
CHECK_CXX_COMPILER_FLAG("-std=c++0x" COMPILER_SUPPORTS_CXX0X)
if(COMPILER_SUPPORTS_CXX11)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++11")
add_definitions(-DCOMPILEDWITHC11)
message(STATUS "Using flag -std=c++11.")
elseif(COMPILER_SUPPORTS_CXX0X)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -std=c++0x")
add_definitions(-DCOMPILEDWITHC0X)
message(STATUS "Using flag -std=c++0x.")
else()
message(FATAL_ERROR "The compiler ${CMAKE_CXX_COMPILER} has no C++11 support. Please use a different C++ compiler.")
endif()
LIST(APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake_modules)
find_package(OpenCV 3.0 QUIET)
if(NOT OpenCV_FOUND)
find_package(OpenCV 2.4.3 QUIET)
if(NOT OpenCV_FOUND)
message(FATAL_ERROR "OpenCV > 2.4.3 not found.")
endif()
endif()
#find_package(Eigen3 3.1.0 REQUIRED)
find_package(Pangolin REQUIRED)
修改后如下:

2)

#Eigen
include_directories("/usr/include/eigen3")
#Sophus
find_package(Sophus REQUIRED)
include_directories( ${Sophus_INCLUDE_DIRS})
include_directories(
${PROJECT_SOURCE_DIR}
${PROJECT_SOURCE_DIR}/ORB_SLAM/include
${PROJECT_SOURCE_DIR}/ORB_SLAM
#${EIGEN3_INCLUDE_DIR}
${Pangolin_INCLUDE_DIRS}
)
set(CMAKE_LIBRARY_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/lib)
3)
add_library(${PROJECT_NAME} SHARED
ORB_SLAM/src/FileYaml.cc
ORB_SLAM/src/System.cc
ORB_SLAM/src/Tracking.cc
ORB_SLAM/src/LocalMapping.cc
ORB_SLAM/src/LoopClosing.cc
ORB_SLAM/src/ORBextractor.cc
ORB_SLAM/src/ORBmatcher.cc
ORB_SLAM/src/FrameDrawer.cc
ORB_SLAM/src/Converter.cc
ORB_SLAM/src/MapPoint.cc
ORB_SLAM/src/KeyFrame.cc
ORB_SLAM/src/Map.cc
ORB_SLAM/src/MapDrawer.cc
ORB_SLAM/src/Optimizer.cc
ORB_SLAM/src/PnPsolver.cc
ORB_SLAM/src/Frame.cc
ORB_SLAM/src/KeyFrameDatabase.cc
ORB_SLAM/src/Sim3Solver.cc
ORB_SLAM/src/Initializer.cc
ORB_SLAM/src/Viewer.cc
4)

将其修改为:
target_link_libraries(${PROJECT_NAME}
${OpenCV_LIBS}
#${EIGEN3_LIBS}
${Pangolin_LIBRARIES}
${Sophus_LIBRARIES}
${PROJECT_SOURCE_DIR}/ORB_SLAM/Thirdparty/DBoW2/lib/libDBoW2.so
${PROJECT_SOURCE_DIR}/ORB_SLAM/Thirdparty/g2o/lib/libg2o.so
)
5)
完成4)操作后,在其后添加:
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/ORB_SLAM/Examples/RGB-D)
add_executable(rgbd_tum
ORB_SLAM/Examples/RGB-D/rgbd_tum.cc)
target_link_libraries(rgbd_tum ${PROJECT_NAME}
${Sophus_LIBRARIES})
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/ORB_SLAM/Examples/Stereo)
add_executable(stereo_kitti
ORB_SLAM/Examples/Stereo/stereo_kitti.cc)
target_link_libraries(stereo_kitti ${PROJECT_NAME}
${Sophus_LIBRARIES})
add_executable(stereo_euroc
ORB_SLAM/Examples/Stereo/stereo_euroc.cc)
add_dependencies(stereo_euroc ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(stereo_euroc ${PROJECT_NAME}
${Sophus_LIBRARIES}
${catkin_LIBRARIES})
add_executable(module_driver src/camera_driver.cpp)
add_dependencies(module_driver ${${PROJECT_NAME}_EXPORTED_TARGETS} ${catkin_EXPORTED_TARGETS})
target_link_libraries(module_driver
${PROJECT_SOURCE_DIR}/../../lib/1604/libindem.so
${catkin_LIBRARIES}
${PROJECT_SOURCE_DIR}/../../lib/1604/libboost_filesystem.so.1.58.0
${PROJECT_SOURCE_DIR}/../../lib/1604/libboost_system.so.1.58.0
${PROJECT_SOURCE_DIR}/../../lib/1604/libg3logger.so.1.3.0-0
${PROJECT_SOURCE_DIR}/../../lib/1604/libnanomsg.so.5
${PROJECT_SOURCE_DIR}/../../lib/1604/libopencv_core.so.3.4
${PROJECT_SOURCE_DIR}/../../lib/1604/libopencv_imgproc.so.3.4
${PROJECT_SOURCE_DIR}/../../lib/1604/libopencv_videoio.so.3.4
pthread
stdc++fs
dl
)
set(CMAKE_RUNTIME_OUTPUT_DIRECTORY ${PROJECT_SOURCE_DIR}/ORB_SLAM/Examples/Monocular)
add_executable(mono_tum
ORB_SLAM/Examples/Monocular/mono_tum.cc)
target_link_libraries(mono_tum
${Sophus_LIBRARIES}
${PROJECT_NAME})
add_executable(mono_kitti
ORB_SLAM/Examples/Monocular/mono_kitti.cc)
target_link_libraries(mono_kitti
${Sophus_LIBRARIES}
${PROJECT_NAME})
add_executable(mono_euroc
ORB_SLAM/Examples/Monocular/mono_euroc.cc)
target_link_libraries(mono_euroc
${Sophus_LIBRARIES}
${PROJECT_NAME})
CMakeLists.txt修改完毕
6. 编译
1)
安装INDEMIND SDK,教程请查看:开讲啦丨INDEMIND双目惯性模组运行ORB-SLAM算法示例
进入SDK-Linux/demo_ros目录下,执行catkin_make命令,结果如下

7. 执行
1)
新打开一个shell,执行roscore命令,如下图

2)
进入SDK-Linux/lib/1604目录下,执行
sudo -s,sudo chmod 777 ./run.sh
之后执行
./run.sh
3)
进入SDK-Linux/demo_ros/src/ORB_SLAM目录下,执行./Examples/Stereo/stereo_euroc命令

注意:此时,将获得去畸变之后的参数,把下列参数写入到SDK-Linux/demo_ros/src/ORB_SLAM/src/Tracking.cc文件中,如下图
float fx = 597.935;
float fy = 597.935;
float cx = 476.987;
float cy = 442.158;
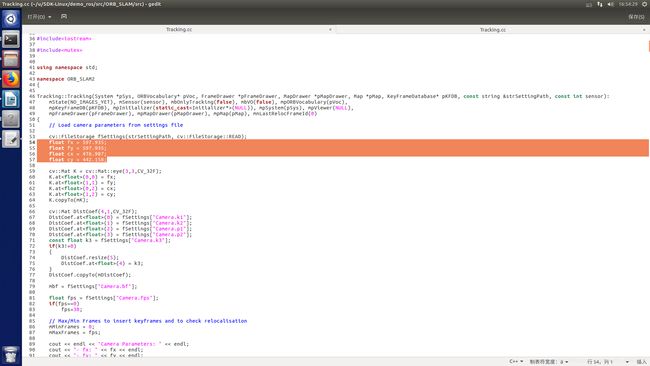
最后,再次编译,并执行,即可得到实时ORB
Demo连接:腾讯视频