图像特征匹配
简介
本文主要演示利用opencv自带的特征检测算子做图像的特征匹配。
检测算子包括
- SIFT
- SURF
- ORB
特征描述子提取算子包括
- SIFT
- SURF
- ORB
- VGG
匹配算法
- FlannBasedMatcher
本文不对相关原理做介绍,只演示其用法,如果对原理感兴趣可以查阅相关文档学习。
首先,包含所需要的头文件
#include
#include
#include
#include
#include
#include
#include
#include
定义几个辅助函数,其声明如下
template
void detect_keypoint(const cv::Ptr det, const cv::Mat &src, std::vector &kpts);
template
void extract_feature_desc(const cv::Ptr feat, const cv::Mat &src, std::vector &kpts, cv::Mat &desc);
template
void detectAndCompute(const cv::Ptr det, const cv::Mat &src, std::vector &kpts, cv::Mat &desc);
/*********************************************************
* @brief 两幅图像特征匹配
* @Inparam desc1
* @Inparam desc2
* @Outparam good_matches
* @return
* @author hscoder
* @date 2020-03-28
********************************************************/
void match(const cv::Mat &desc1, const cv::Mat &desc2, std::vector &good_matches , bool orb = false);
void show_match(cv::Mat &left, const std::vector &kpt1, cv::Mat &right, const std::vector &kpt2, std::vector &good_matches, const char *winName);
这里定义了三个模板函数,分别是detect_keypoint、extract_feature_desc、detectAndCompute
- detect_keypoint 检测关键点函数,可以传入sift、surf、orb等检测对象
- extract_feature_desc 提取特征描述子,可以传入sift、surf、orb、vgg等
- detectAndCompute 检测关键点并提取特征描述子,支持sift、surf、orb
另外两个
- match 特征匹配,利用Lowe’s algorithm,获取优秀匹配点
- show_match 图像匹配可视化显示
主要代码如下
cv::Mat left_image = imread("/Users/han/Deeplearning/opencv_tutorial/dnn_tutorial/left.jpeg");
cv::Mat right_image = imread("/Users/han/Deeplearning/opencv_tutorial/dnn_tutorial/right.jpeg");
// 定义sift检测器
cv::Ptr sift = cv::xfeatures2d::SIFT::create();
// 定义surf检测器
cv::Ptr surf = cv::xfeatures2d::SURF::create(1000);
// 定义描述子提取器
// sift
cv::Ptr sift_desc = cv::xfeatures2d::SiftDescriptorExtractor::create();
// surf
cv::Ptr surf_desc = cv::xfeatures2d::SurfDescriptorExtractor::create();
// vgg
cv::Ptr vgg_desc = cv::xfeatures2d::VGG::create();
std::vector kpts1, kpts2;
cv::Mat desc1, desc2;
std::vector good_matches;
auto start_time = std::chrono::steady_clock::now();
auto end_time = std::chrono::steady_clock::now();
auto cost_time = std::chrono::duration_cast(end_time - start_time).count();
start_time = std::chrono::steady_clock::now();
std::cout << "-----------------sift------------------" << std::endl;
detectAndCompute(sift, left_image, kpts1, desc1);
detectAndCompute(sift, right_image, kpts2, desc2);
std::cout << "left image detect " << kpts1.size() << " keypoint" << std::endl;
std::cout << "right image detect " << kpts2.size() << " keypoint" << std::endl;
std::cout << "desc1 size: (" << desc1.rows << " , " << desc1.cols << ")" << std::endl;
std::cout << "desc2 size: (" << desc2.rows << " , " << desc2.cols << ")" << std::endl;
end_time = std::chrono::steady_clock::now();
cost_time = std::chrono::duration_cast(end_time - start_time).count();
std::cout << "cost time: " << cost_time << ("ms") << std::endl;
match(desc1, desc2, good_matches);
std::cout << "经过匹配之后仍有: " << good_matches.size() << "对匹配对" << std::endl;
show_match(left_image, kpts1, right_image, kpts2, good_matches, "sift");
std::cout << "---------------------------------------";
kpts1.clear();
kpts2.clear();
good_matches.clear();
std::cout << "-----------------surf------------------" << std::endl;
start_time = std::chrono::steady_clock::now();
detectAndCompute(surf, left_image, kpts1, desc1);
detectAndCompute(surf, right_image, kpts2, desc2);
std::cout << "left image detect " << kpts1.size() << " keypoint" << std::endl;
std::cout << "right image detect " << kpts2.size() << " keypoint" << std::endl;
std::cout << "desc1 size: (" << desc1.rows << " , " << desc1.cols << ")" << std::endl;
std::cout << "desc2 size: (" << desc2.rows << " , " << desc2.cols << ")" << std::endl;
match(desc1, desc2, good_matches);
std::cout << "good match number is: " << good_matches.size() << std::endl;
end_time = std::chrono::steady_clock::now();
cost_time = std::chrono::duration_cast(end_time - start_time).count();
std::cout << "cost time: " << cost_time << ("ms") << std::endl;
show_match(left_image, kpts1, right_image, kpts2, good_matches, "surf");
std::cout << "---------------------------------------";
kpts1.clear();
kpts2.clear();
good_matches.clear();
std::cout << "---------------surf+vgg----------------" << std::endl;
start_time = std::chrono::steady_clock::now();
detect_keypoint(surf, left_image , kpts1);
detect_keypoint(surf , right_image , kpts2);
std::cout << "left image detect " << kpts1.size() << " keypoint" << std::endl;
std::cout << "right image detect " << kpts2.size() << " keypoint" << std::endl;
extract_feature_desc(vgg_desc , left_image , kpts1 , desc1);
extract_feature_desc(vgg_desc , right_image , kpts2 , desc2);
std::cout << "desc1 size: (" << desc1.rows << " , " << desc1.cols << ")" << std::endl;
std::cout << "desc2 size: (" << desc2.rows << " , " << desc2.cols << ")" << std::endl;
match(desc1, desc2, good_matches);
std::cout << "good match number is: " << good_matches.size() << std::endl;
end_time = std::chrono::steady_clock::now();
cost_time = std::chrono::duration_cast(end_time - start_time).count();
std::cout << "cost time: " << cost_time << ("ms") << std::endl;
show_match(left_image, kpts1, right_image, kpts2, good_matches, "surf+vgg");
std::cout << "---------------------------------------";
return 0;
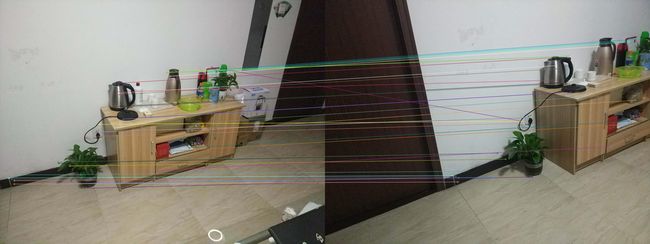
贴上不同算法的特征匹配图
Sift

Surf
Orb

Sift+VGG

Surf+VGG

上述匹配我采用的FlannBasedMatcher,opencv中有一个匹配器的抽象基类,其具体类有:FlannBasedMatcher、BFMatcher
因此匹配器可以由静态工厂函数方法直接创建,如下
cv::Ptr matcher = cv::DescriptorMatcher::create(const string& descriptorMatcherType)
支持的匹配类型有
- BruteForce (it uses L2 )
- BruteForce-L1
- BruteForce-Hamming
- BruteForce-Hamming(2)
- FlannBased
如有兴趣,可以用一个swich实现多种方法切换,比较一下效果。
本人以后会在个人公众号上定期更新一些cv相关的内容,如有兴趣可以关注本人公众号
