使用Google colab的GPU运行resnet
使用Google colab的GPU运行resnet
由于我的电脑显卡是AMD,跑代码每一个epoch都要超级超级久,偶然间听到了Google colab,于是用起来了,感觉非常爽
Colaboratory 是一个免费的 Jupyter 笔记本环境,不需要进行任何设置就可以使用,并且完全在云端运行。
借助 Colaboratory,可以编写和执行代码、保存和共享分析结果,以及利用强大的计算资源,所有这些都可通过浏览器免费使用。
今日依旧是菜菜小孙,感谢某东的Jikess
创建Google账户
手机号无法注册
一步一步跟着就行,不过会出现中国手机号无法注册的问题,令人头秃。

下载Google Chrome,把之前的极速版给卸载了,settings中language设置成英语为默认语言,把中文(简体)卸载掉,就结局了手机号无法注册的问题。

然后就可以创建了
进入Google colab
网站
访问该网站,需要 (嘻嘻嘻)https://colab.research.google.com/notebooks/welcome.ipynb
新建
在初次使用过colab后,登录你的谷歌云盘,你就会发现可以新建Colaboratory了,新建它。
new中可以新建folder,也可以新建colaboratory

使用GPU
更改运行时类型(None,CPU,GPU)

这个地方也需要连接一下

运行代码,挂载谷歌云盘
这一步很重要,Colab的运行原理实际上就是给你分配一台远程的带GPU的主机,所以它的原始路径不是你的谷歌云盘(也就是你的代码文件)所在的路径。所以第一步我们先要把谷歌云盘挂载带到那台远程主机上:
from google.colab import drive
drive.mount('/content/gdrive')
输入并运行这行代码,会出来一个框让你输验证码,点击进入连接,按提示复制粘贴完成即可。
更改运行目录
import os
os.chdir("/content/gdrive/My Drive/Pytorch_try")
这是我的Pytorch_try文件夹

上传文件运行
点击文件夹名字,上传文件
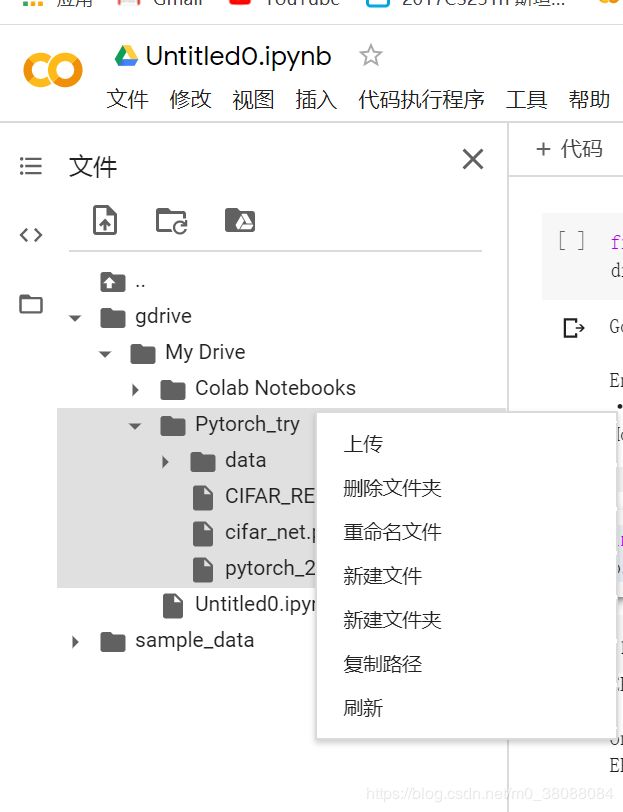
上传文件运行
第一种方式是直接跟Jupyter Notebook一样运行,不过不知道为什么会报错
An exception has occurred, use %tb to see the full traceback. SystemExit: 2
于是尝试了上传文件运行
!python CIFAR_RES.py
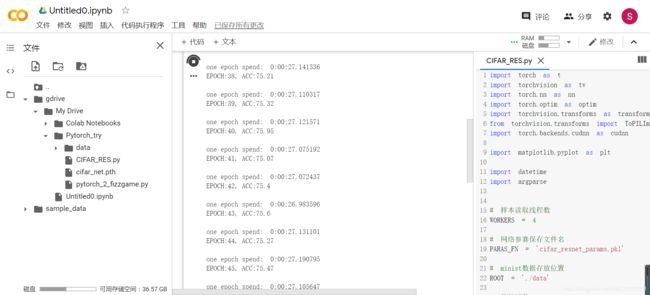
就跑起来了,每个epoch才25s左右,感觉非常棒,感谢大佬指点https://www.jianshu.com/p/a42d69568966
下面是resnet训练CIFAR10
import torch as t
import torchvision as tv
import torch.nn as nn
import torch.optim as optim
import torchvision.transforms as transforms
from torchvision.transforms import ToPILImage
import torch.backends.cudnn as cudnn
import matplotlib.pyplot as plt
import datetime
import argparse
# 样本读取线程数
WORKERS = 4
# 网络参赛保存文件名
PARAS_FN = 'cifar_resnet_params.pkl'
# minist数据存放位置
ROOT = './data'
# 目标函数
loss_func = nn.CrossEntropyLoss()
# 最优结果
best_acc = 0
# 记录准确率,显示曲线
global_train_acc = []
global_test_acc = []
'''
残差块
in_channels, out_channels:残差块的输入、输出通道数
对第一层,in out channel都是64,其他层则不同
对每一层,如果in out channel不同, stride是1,其他层则为2
'''
class ResBlock(nn.Module):
def __init__(self, in_channels, out_channels, stride=1):
super(ResBlock, self).__init__()
# 残差块的第一个卷积
# 通道数变换in->out,每一层(除第一层外)的第一个block
# 图片尺寸变换:stride=2时,w-3+2 / 2 + 1 = w/2,w/2 * w/2
# stride=1时尺寸不变,w-3+2 / 1 + 1 = w
self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size=3, stride=stride, padding=1)
self.bn1 = nn.BatchNorm2d(out_channels)
self.relu = nn.ReLU(inplace=True)
# 残差块的第二个卷积
# 通道数、图片尺寸均不变
self.conv2 = nn.Conv2d(out_channels, out_channels, kernel_size=3, stride=1, padding=1)
self.bn2 = nn.BatchNorm2d(out_channels)
# 残差块的shortcut
# 如果残差块的输入输出通道数不同,则需要变换通道数及图片尺寸,以和residual部分相加
# 输出:通道数*2 图片尺寸/2
if in_channels != out_channels:
self.downsample = nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size=1, stride=2),
nn.BatchNorm2d(out_channels)
)
else:
# 通道数相同,无需做变换,在forward中identity = x
self.downsample = None
def forward(self, x):
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out
'''
定义网络结构
'''
class ResNet34(nn.Module):
def __init__(self, block):
super(ResNet34, self).__init__()
# 初始卷积层核池化层
self.first = nn.Sequential(
# 卷基层1:7*7kernel,2stride,3padding,outmap:32-7+2*3 / 2 + 1,16*16
nn.Conv2d(3, 64, 7, 2, 3),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
# 最大池化,3*3kernel,1stride(32的原始输入图片较小,不再缩小尺寸),1padding,
# outmap:16-3+2*1 / 1 + 1,16*16
nn.MaxPool2d(3, 1, 1)
)
# 第一层,通道数不变
self.layer1 = self.make_layer(block, 64, 64, 3, 1)
# 第2、3、4层,通道数*2,图片尺寸/2
self.layer2 = self.make_layer(block, 64, 128, 4, 2) # 输出8*8
self.layer3 = self.make_layer(block, 128, 256, 6, 2) # 输出4*4
self.layer4 = self.make_layer(block, 256, 512, 3, 2) # 输出2*2
self.avg_pool = nn.AvgPool2d(2) # 输出512*1
self.fc = nn.Linear(512, 10)
def make_layer(self, block, in_channels, out_channels, block_num, stride):
layers = []
# 每一层的第一个block,通道数可能不同
layers.append(block(in_channels, out_channels, stride))
# 每一层的其他block,通道数不变,图片尺寸不变
for i in range(block_num - 1):
layers.append(block(out_channels, out_channels, 1))
return nn.Sequential(*layers)
def forward(self, x):
x = self.first(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.avg_pool(x)
# x.size()[0]: batch size
x = x.view(x.size()[0], -1)
x = self.fc(x)
return x
'''
训练并测试网络
net:网络模型
train_data_load:训练数据集
optimizer:优化器
epoch:第几次训练迭代
log_interval:训练过程中损失函数值和准确率的打印频率
'''
def net_train(net, train_data_load, optimizer, epoch, log_interval):
net.train()
begin = datetime.datetime.now()
# 样本总数
total = len(train_data_load.dataset)
# 样本批次训练的损失函数值的和
train_loss = 0
# 识别正确的样本数
ok = 0
for i, data in enumerate(train_data_load, 0):
img, label = data
img, label = img.cuda(), label.cuda()
optimizer.zero_grad()
outs = net(img)
loss = loss_func(outs, label)
loss.backward()
optimizer.step()
# 累加损失值和训练样本数
train_loss += loss.item()
_, predicted = t.max(outs.data, 1)
# 累加识别正确的样本数
ok += (predicted == label).sum()
if (i + 1) % log_interval == 0:
# 训练结果输出
# 已训练的样本数
traind_total = (i + 1) * len(label)
# 准确度
acc = 100. * ok / traind_total
# 记录训练准确率以输出变化曲线
global_train_acc.append(acc)
end = datetime.datetime.now()
print('one epoch spend: ', end - begin)
'''
用测试集检查准确率
'''
def net_test(net, test_data_load, epoch):
net.eval()
ok = 0
for i, data in enumerate(test_data_load):
img, label = data
img, label = img.cuda(), label.cuda()
outs = net(img)
_, pre = t.max(outs.data, 1)
ok += (pre == label).sum()
acc = ok.item() * 100. / (len(test_data_load.dataset))
print('EPOCH:{}, ACC:{}\n'.format(epoch, acc))
# 记录测试准确率以输出变化曲线
global_test_acc.append(acc)
# 最好准确度记录
global best_acc
if acc > best_acc:
best_acc = acc
'''
显示数据集中一个图片
'''
def img_show(dataset, index):
classes = ('plane', 'car', 'bird', 'cat',
'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
show = ToPILImage()
data, label = dataset[index]
print('img is a ', classes[label])
show((data + 1) / 2).resize((100, 100)).show()
'''
显示训练准确率、测试准确率变化曲线
'''
def show_acc_curv(ratio):
# 训练准确率曲线的x、y
train_x = list(range(len(global_train_acc)))
train_y = global_train_acc
# 测试准确率曲线的x、y
# 每ratio个训练准确率对应一个测试准确率
test_x = train_x[ratio-1::ratio]
test_y = global_test_acc
plt.title('CIFAR10 RESNET34 ACC')
plt.plot(train_x, train_y, color='green', label='training accuracy')
plt.plot(test_x, test_y, color='red', label='testing accuracy')
# 显示图例
plt.legend()
plt.xlabel('iterations')
plt.ylabel('accs')
plt.show()
def main():
# 训练超参数设置,可通过命令行设置
parser = argparse.ArgumentParser(description='PyTorch CIFA10 ResNet34 Example')
parser.add_argument('--batch-size', type=int, default=128, metavar='N',
help='input batch size for training (default: 128)')
parser.add_argument('--test-batch-size', type=int, default=100, metavar='N',
help='input batch size for testing (default: 100)')
parser.add_argument('--epochs', type=int, default=200, metavar='N',
help='number of epochs to train (default: 200)')
parser.add_argument('--lr', type=float, default=0.1, metavar='LR',
help='learning rate (default: 0.1)')
parser.add_argument('--momentum', type=float, default=0.9, metavar='M',
help='SGD momentum (default: 0.9)')
parser.add_argument('--log-interval', type=int, default=10, metavar='N',
help='how many batches to wait before logging training status (default: 10)')
parser.add_argument('--no-train', action='store_true', default=False,
help='If train the Model')
parser.add_argument('--save-model', action='store_true', default=False,
help='For Saving the current Model')
args = parser.parse_args()
# 图像数值转换,ToTensor源码注释
"""Convert a ``PIL Image`` or ``numpy.ndarray`` to tensor.
Converts a PIL Image or numpy.ndarray (H x W x C) in the range
[0, 255] to a torch.FloatTensor of shape (C x H x W) in the range [0.0, 1.0].
"""
# 归一化把[0.0, 1.0]变换为[-1,1], ([0, 1] - 0.5) / 0.5 = [-1, 1]
transform = tv.transforms.Compose([
transforms.ToTensor(),
transforms.Normalize([0.5, 0.5, 0.5], [0.5, 0.5, 0.5])])
# 定义数据集
train_data = tv.datasets.CIFAR10(root=ROOT, train=True, download=True, transform=transform)
test_data = tv.datasets.CIFAR10(root=ROOT, train=False, download=False, transform=transform)
train_load = t.utils.data.DataLoader(train_data, batch_size=args.batch_size, shuffle=True, num_workers=WORKERS)
test_load = t.utils.data.DataLoader(test_data, batch_size=args.test_batch_size, shuffle=False, num_workers=WORKERS)
net = ResNet34(ResBlock).cuda()
print(net)
# 并行计算提高运行速度
net = nn.DataParallel(net)
cudnn.benchmark = True
# 如果不训练,直接加载保存的网络参数进行测试集验证
if args.no_train:
net.load_state_dict(t.load(PARAS_FN))
net_test(net, test_load, 0)
return
optimizer = optim.SGD(net.parameters(), lr=args.lr, momentum=args.momentum)
start_time = datetime.datetime.now()
for epoch in range(1, args.epochs + 1):
net_train(net, train_load, optimizer, epoch, args.log_interval)
# 每个epoch结束后用测试集检查识别准确度
net_test(net, test_load, epoch)
end_time = datetime.datetime.now()
global best_acc
print('CIFAR10 pytorch ResNet34 Train: EPOCH:{}, BATCH_SZ:{}, LR:{}, ACC:{}'.format(args.epochs, args.batch_size, args.lr, best_acc))
print('train spend time: ', end_time - start_time)
if args.save_model:
t.save(net.state_dict(), PARAS_FN)
if __name__ == '__main__':
main()