STM32多路adc检测
首先先上一图,自己做的检测8位adc.测量八个adc传感器
1.12位分辨率
在STM32所有系列芯片中只有少部分是16位的,如:F373芯片。
12位分辨率意味着我们采集电压的精度可以达到:Vref /4096。
采集电压 = Vref * ADC_DR / 4096;
Vref:参考电压
ADC_DR:读取到ADC数据寄存器的值
由于寄存器是32位的,在配置的时候分左对齐和右对齐,一般我们使用右对齐,也就是对低12位数据为有效数据。
2.转换模式
A.单次和连续转换
单次:单通道单次转换、多通道单次(分多次)转换;
连续:单通道连续转换、多通道连续(循环)转换;
B.双ADC模式
也就是使用到了两个ADC,比如:ADC1和ADC2同时使用也就是双ADC模式。在该模式下可以配置为如下一些模式:同步规则模式、同步注入模式、独立模式等。
3.触发源
触发源就是触发ADC转换的来源,有外部中断线、定时器、软件等触发源。我们初学者常用软件触发,也就是需要转换一次,我们软件启动一次(本文提供实例也是软件触发)。
Ⅳ、本文实例描述
本文实例中关于ADC部分的配置及知识点,针对初学者相对比较多、理解起来也相对比较难一点。
根据题目“ADC三通道逐次转换(单次、单通道软件触发)”我们不难理解其转换的过程,但如何实现是一个难点。
1、三通道:我们定义了3条通道ADC1的ADC_Channel_1、ADC_Channel_2、ADC_Channel_3.
2.逐次转换:我们使用的是间断模式(规则组),也就是在规则组中定义了触发转换的序列。
3.单次:我们是没触发一次转换一次。
4.单通道:每次触发只转换一条通道。
Ⅴ、源代码分析
笔者以F1标准外设库(同时也建议初学者使用官方的标准外设库)为基础建立的工程,主要以库的方式来讲述(若您的F1芯片与提供工程不一样,可微信回复“修改型号”)。
下面将讲述ADC重要的几点:
1.输入引脚配置
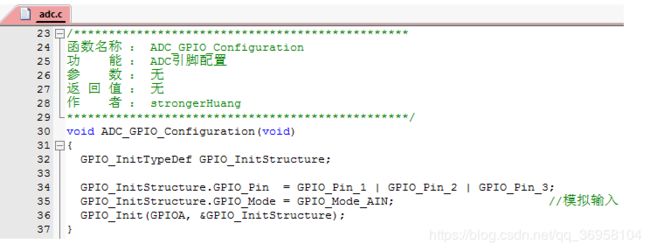
该函数位于adc.c文件下面;
引脚与通道的对应关系请参看你使用芯片的数据手册。
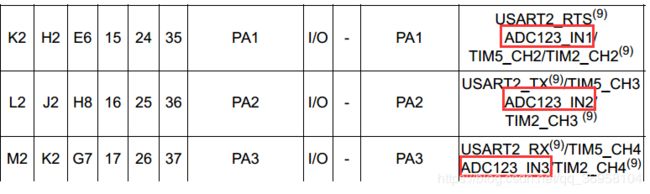
注意:
为什么是“ADC123_IN1”? 而不是ADC1_IN1,或者ADC2_IN1?
原因是ADC1、ADC2和ADC3共用这些引脚。
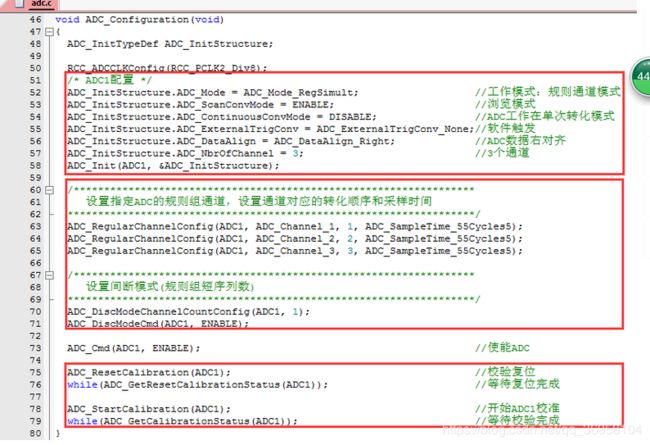
2. ADC配置
该函数位于rtc.c文件下面;
这个函数是本文的重点,是配置工作模式、规则通道及间断模式等的重点。下面依次来讲述源代码内容的意思;
A.初始化基本参数:
工作模式:ADC_Mode = ADC_Mode_RegSimult;
总共有10种,主要都是针对双ADC下使用。针对初学者这里不多描述,感兴趣的朋友可以先自行研究一下各个模式的使用。
浏览模式:ADC_ScanConvMode = ENABLE;
主要是针对多条通道而言,也就是说你是否有多条通道。
多通道:ENABLE;
单通道:DISABLE;
转换模式:ADC_ContinuousConvMode = DISABLE;
这里是配置是否需要连续转换。
连续转换ENABLE:也就是只需要启动(触发)转换一次,后面就不用再次启动(触发)就可以连续工作了。
单次转换DISABLE:也就是根据一次转换完后需要再次启动(触发)才能工作。
触发方式:ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
触发方式也就是使用什么方法触发ADC转换。哟定时器、外部触发、软件触发,一般常用软件触发。这里有很多种触发方式,详情可以参考其参数。
对其方式:ADC_DataAlign = ADC_DataAlign_Right;
右对其:低12位数据为有效位(常用);
左对其:高12为数据为有效位;
通道数:ADC_NbrOfChannel = 3;
这个参数比较简单,我们定义工作的通道数量。
B.设置规则组通道:
ADC_RegularChannelConfig(ADC1, ADC_Channel_1, 1, ADC_SampleTime_55Cycles5);
ADC_RegularChannelConfig(ADC1, ADC_Channel_2, 2, ADC_SampleTime_55Cycles5);
ADC_RegularChannelConfig(ADC1, ADC_Channel_3, 3, ADC_SampleTime_55Cycles5);
我们定义通道1的转换顺序为第1、通道2的转换顺序为第2、通道3的转换顺序为第3;
ADC_DiscModeChannelCountConfig(ADC1, 1);
ADC_DiscModeCmd(ADC1, ENABLE);
规则组间断模式配置。我们配置短序列为1,也就是说每触发一次转换一条通道。
关于间断模式请看参考手册。

C.校验:
ADC_ResetCalibration(ADC1); //校验复位
while(ADC_GetResetCalibrationStatus(ADC1)); //等待复位完成
ADC_StartCalibration(ADC1); //开始ADC1校准
while(ADC_GetCalibrationStatus(ADC1)); //等待校验完成
建议每次上电校正一次。
ADC有一个内置自校准模式。校准可大幅减小因内部电容器组的变化而造成的准精度误差。在校准期间,在每个电容器上都会计算出一个误差修正码(数字值),这个码用于消除在随后的转换中每个电容器上产生的误差。
3. ADC采集
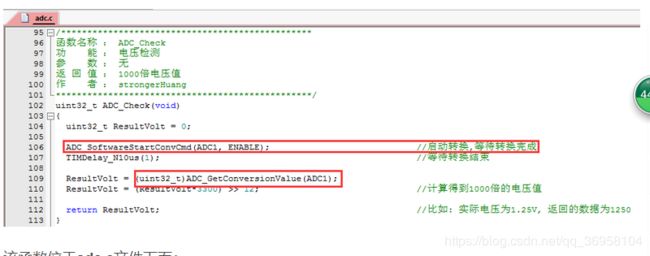
该函数位于adc.c文件下面;
上面的配置完成之后,就是实际采集数据的过程了。由于我们配置的是浏览(循环)模式,单次采集,也就是说我们没调用触发一次该函数,就会循环采集一条通道。
Ⅵ、说明
关于STM32的ADC转换这一块功能确实交强大也相对来说比较复杂,或许文中讲述的还不够清楚,若有不清楚的可以关注微信,在微信上留言。
关于笔者提供的软件工程实例,可关注微信,在会话框回复“关于工程”,有关于工程结构描述、型号修改等讲述。
以上总结仅供参考,若有不对之处,敬请谅解。
以下为配置的程序
STM32 ADC多通道转换
描述:用ADC连续采集11路模拟信号,并由DMA传输到内存。ADC配置为扫描并且连续转换模式,ADC的时钟配置为12MHZ。在每次转换结束后,由DMA循环将转换的数据传输到内存中。ADC可以连续采集N次求平均值。最后通过串口传输出最后转换的结果。
程序如下:
#i nclude "stm32f10x.h" //这个头文件包括STM32F10x所有外围寄存器、位、内存映射的定义
#i nclude "eval.h" //头文件(包括串口、按键、LED的函数声明)
#i nclude "SysTickDelay.h"
#i nclude "UART_INTERFACE.h"
#i nclude
#define N 50 //每通道采50次
#define M 12 //为12个通道
vu16 AD_Value[N][M]; //用来存放ADC转换结果,也是DMA的目标地址
vu16 After_filter[M]; //用来存放求平均值之后的结果
int i;
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //因为USART1管脚是以复用的形式接到GPIO口上的,所以使用复用推挽式输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//PA0/1/2 作为模拟通道输入引脚
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0| GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; //模拟输入引脚
GPIO_Init(GPIOA, &GPIO_InitStructure);
//PB0/1 作为模拟通道输入引脚
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; //模拟输入引脚
GPIO_Init(GPIOB, &GPIO_InitStructure);
//PC0/1/2/3/4/5 作为模拟通道输入引脚
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN; //模拟输入引脚
GPIO_Init(GPIOC, &GPIO_InitStructure);
}
}
void RCC_Configuration(void)
{
ErrorStatus HSEStartUpStatus;
RCC_DeInit(); //RCC 系统复位
RCC_HSEConfig(RCC_HSE_ON); //开启HSE
HSEStartUpStatus = RCC_WaitForHSEStartUp(); //等待HSE准备好
if(HSEStartUpStatus == SUCCESS)
{
FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable); //Enable Prefetch Buffer
FLASH_SetLatency(FLASH_Latency_2); //Set 2 Latency cycles
RCC_HCLKConfig(RCC_SYSCLK_Div1); //AHB clock = SYSCLK
RCC_PCLK2Config(RCC_HCLK_Div1); //APB2 clock = HCLK
RCC_PCLK1Config(RCC_HCLK_Div2); //APB1 clock = HCLK/2
RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_6); //PLLCLK = 12MHz * 6 = 72 MHz
RCC_PLLCmd(ENABLE); //Enable PLL
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET); //Wait till PLL is ready
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK); //Select PLL as system clock source
while(RCC_GetSYSCLKSource() != 0x08); //Wait till PLL is used as system clock source
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA|RCC_APB2Periph_GPIOB
| RCC_APB2Periph_GPIOC |RCC_APB2Periph_ADC1 | RCC_APB2Periph_AFIO |RCC_APB2Periph_USART1, ENABLE ); //使能ADC1通道时钟,各个管脚时钟
RCC_ADCCLKConfig(RCC_PCLK2_Div6); //72M/6=12,ADC最大时间不能超过14M
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE); //使能DMA传输
}
}
void ADC1_Configuration(void)
{
ADC_InitTypeDef ADC_InitStructure;
ADC_DeInit(ADC1); //将外设 ADC1 的全部寄存器重设为缺省值
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //ADC工作模式:ADC1和ADC2工作在独立模式
ADC_InitStructure.ADC_ScanConvMode =ENABLE; //模数转换工作在扫描模式
ADC_InitStructure.ADC_ContinuousConvMode = ENABLE; //模数转换工作在连续转换模式
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //外部触发转换关闭
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //ADC数据右对齐
ADC_InitStructure.ADC_NbrOfChannel = M; //顺序进行规则转换的ADC通道的数目
ADC_Init(ADC1, &ADC_InitStructure); //根据ADC_InitStruct中指定的参数初始化外设ADCx的寄存器
//设置指定ADC的规则组通道,设置它们的转化顺序和采样时间
//ADC1,ADC通道x,规则采样顺序值为y,采样时间为239.5周期
ADC_RegularChannelConfig(ADC1, ADC_Channel_0, 1, ADC_SampleTime_239Cycles5 );
ADC_RegularChannelConfig(ADC1, ADC_Channel_1, 2, ADC_SampleTime_239Cycles5 );
ADC_RegularChannelConfig(ADC1, ADC_Channel_2, 3, ADC_SampleTime_239Cycles5 );
ADC_RegularChannelConfig(ADC1, ADC_Channel_3, 4, ADC_SampleTime_239Cycles5 );
ADC_RegularChannelConfig(ADC1, ADC_Channel_8, 5, ADC_SampleTime_239Cycles5 );
ADC_RegularChannelConfig(ADC1, ADC_Channel_9, 6, ADC_SampleTime_239Cycles5 );
ADC_RegularChannelConfig(ADC1, ADC_Channel_10, 7, ADC_SampleTime_239Cycles5 );
ADC_RegularChannelConfig(ADC1, ADC_Channel_11, 8, ADC_SampleTime_239Cycles5 );
ADC_RegularChannelConfig(ADC1, ADC_Channel_12, 9, ADC_SampleTime_239Cycles5 );
ADC_RegularChannelConfig(ADC1, ADC_Channel_13, 10, ADC_SampleTime_239Cycles5 );
ADC_RegularChannelConfig(ADC1, ADC_Channel_14, 11, ADC_SampleTime_239Cycles5 );
ADC_RegularChannelConfig(ADC1, ADC_Channel_15, 12, ADC_SampleTime_239Cycles5 );
// 开启ADC的DMA支持(要实现DMA功能,还需独立配置DMA通道等参数)
ADC_DMACmd(ADC1, ENABLE);
ADC_Cmd(ADC1, ENABLE); //使能指定的ADC1
ADC_ResetCalibration(ADC1); //复位指定的ADC1的校准寄存器
while(ADC_GetResetCalibrationStatus(ADC1)); //获取ADC1复位校准寄存器的状态,设置状态则等待
ADC_StartCalibration(ADC1); //开始指定ADC1的校准状态
while(ADC_GetCalibrationStatus(ADC1)); //获取指定ADC1的校准程序,设置状态则等待
}
void DMA_Configuration(void)
{
DMA_InitTypeDef DMA_InitStructure;
DMA_DeInit(DMA1_Channel1); //将DMA的通道1寄存器重设为缺省值
DMA_InitStructure.DMA_PeripheralBaseAddr = (u32)&ADC1->DR; //DMA外设ADC基地址
DMA_InitStructure.DMA_MemoryBaseAddr = (u32)&AD_Value; //DMA内存基地址
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC; //内存作为数据传输的目的地
DMA_InitStructure.DMA_BufferSize = N*M; //DMA通道的DMA缓存的大小
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable; //外设地址寄存器不变
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable; //内存地址寄存器递增
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord; //数据宽度为16位
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord; //数据宽度为16位
DMA_InitStructure.DMA_Mode = DMA_Mode_Circular; //工作在循环缓存模式
DMA_InitStructure.DMA_Priority = DMA_Priority_High; //DMA通道 x拥有高优先级
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable; //DMA通道x没有设置为内存到内存传输
DMA_Init(DMA1_Channel1, &DMA_InitStructure); //根据DMA_InitStruct中指定的参数初始化DMA的通道
}
//配置所有外设
void Init_All_Periph(void)
{
RCC_Configuration();
GPIO_Configuration();
ADC1_Configuration();
DMA_Configuration();
//USART1_Configuration();
USART_Configuration(9600);
}
u16 GetVolt(u16 advalue)
{
return (u16)(advalue * 330 / 4096); //求的结果扩大了100倍,方便下面求出小数
}
void filter(void)
{
int sum = 0;
u8 count;
for(i=0;i<12;i++)
{
for ( count=0;count { sum += AD_Value[count][i]; } After_filter[i]=sum/N; sum=0; } u16 value[M]; init_All_Periph(); filter(); printf("value[%d]:t%d.%dvn",i,value[i]/100,value[i]0) ; }
}
int main(void)
{
SysTick_Initaize();
ADC_SoftwareStartConvCmd(ADC1, ENABLE);
DMA_Cmd(DMA1_Channel1, ENABLE); //启动DMA通道
while(1)
{
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);//等待传输完成否则第一位数据容易丢失
for(i=0;i<12;i++)
{
value[i]= GetVolt(After_filter[i]);
delay_ms(100);
}
}
总结
该程序中的两个宏定义,M和N,分别代表有多少个通道,每个通道转换多少次,可以修改其值。
曾出现的问题:配置时钟时要知道外部晶振是多少,以便准确配置时钟。将转换值由二进制转换为十进制时,要先扩大100倍,方便显示小数。最后串口输出时在 printf语句之前加这句代码,防止输出的第一位数据丢失:while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);