esp32cam小车
闲来没事,把以前做的摄像头小车发出来。视频
。先说说线路esp32cam模块一个h桥直流电机驱动一个履带底盘一个
io用的12,13,14,15电源就不说了然后h桥驱动器用的最便宜的2块多。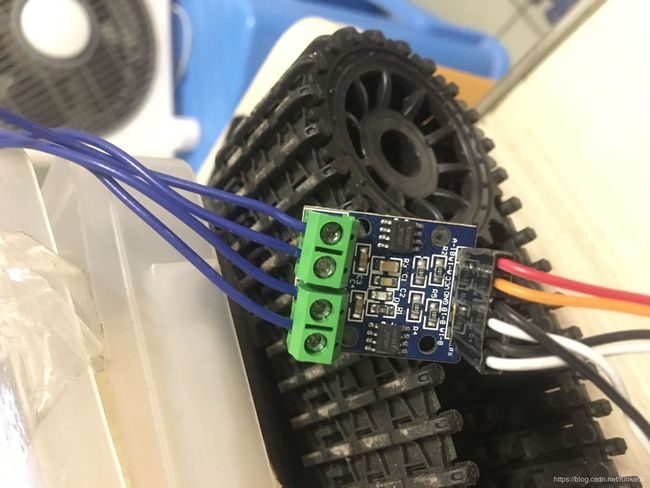
还有小车这个就贵点了
io12,13一组电机14,15一组,就这么简单
然后代码以前用的官方的程序改的有点麻烦,后来用的arduino这个简单在原有代码上添加脉冲代码主要改变占空比来改变速度ledcSetup函数用了两个低速和一个高速通道记不太清楚了频率都设成500别的也可以,影响不大,然后建立一个socket服务器端口800和手机端通讯。可做路由器端口映射实现远程操作,arduino代码
#include "esp_camera.h"
#include 无语了还要一点一点拷贝
下次再写安卓端