stm32控制半导体制冷器实现饮水机保温制冷功能
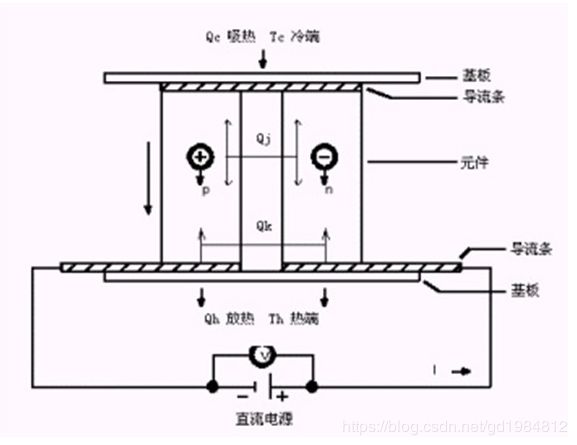
半导体致冷器件是由半导体所组成的一种冷却装置,随着近代的半导体发展才有实际的应用,也就是致冷器的发明。其工作原理是由直流电源提供电子流所需的能量,通上电源后,电子负极(-)出发,首先经过P型半导体,于此吸热量,到了N型半导体,又将热量放出,每经过一个NP模块,就有热量由一边被送到令外一边造成温差而形成冷热端。冷热端分别由两片陶瓷片所构成,冷端要接热源,也就是欲冷却之。在以往致冷器是运用在CPU的,是利用冷端面来冷却CPU,而热端面散出的热量则必需靠风扇来排出。致冷器也应用于做成车用冷/热保温箱,冷的方面可以冷饮机,热的方面可以保温热的东西。
半导体制冷片的工作原理是基于帕尔帖原理,该效应是在1834年由J.A.C帕尔帖首先发现的,即利用当两种不同的导体A和B组成的电路且通有直流电时,在接头处除焦耳热以外还会释放出某种其它的热量,而另一个接头处则吸收热量,且帕尔帖效应所引起的这种现象是可逆的,改变电流方向时,放热和吸热的接头也随之改变,吸收和放出的热量与电流强度I成正比,且与两种导体的性质及热端的温度有关
设计要求使用一块制冷片实现制冷和保温,也就是要设计可以正向反向输出的电源,使用温度传感器采集温度,当接近设定温度时,逐步减小驱动电流,直到达到平衡为止。项目中使用两片IR2101S驱动NMOS实现H桥驱动电路,使用定时器PWM控制输出电流,驱动电路原理图如下。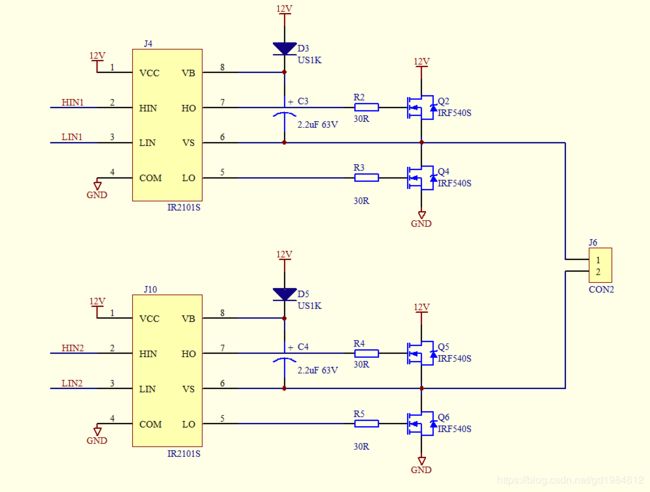
主控采用STM32.关键程序如下
void TIM_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_OCInitTypeDef TIM_OCInitStructure;
TIM_BDTRInitTypeDef TIM_BDTRInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
// ¿ªÆô¶¨Ê±Æ÷ʱÖÓ,¼´ÄÚ²¿Ê±ÖÓCK_INT=72M
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB | RCC_APB2Periph_TIM1, ENABLE);
// Êä³ö±È½ÏͨµÀ1 GPIO ³õʼ»¯
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 | GPIO_Pin_9 ;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14 ;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB, GPIO_Pin_13);
GPIO_ResetBits(GPIOB, GPIO_Pin_14);
TIM_DeInit(TIM1); //½«ÍâÉèTIM1¼Ä´æÆ÷ÖØÉèΪȱʡֵ
TIM_TimeBaseInitStruct.TIM_ClockDivision = TIM_CKD_DIV1 ; //ÉèÖÃÁËʱÖÓ·Ö¸î(Tck_tim)
TIM_TimeBaseInitStruct.TIM_CounterMode = TIM_CounterMode_Up ; //Ñ¡ÔñÁ˼ÆÊýÆ÷ģʽ(TIMÏòÉϼÆÊýģʽ)
TIM_TimeBaseInitStruct.TIM_Period = 6005 ; //É趨¼ÆÊýÆ÷×Ô¶¯ÖØ×°Öµ,È¡Öµ·¶Î§0x0000~0xFFFF
TIM_TimeBaseInitStruct.TIM_Prescaler = 71 ; //ÉèÖÃÓÃÀ´×÷ΪTIM3ʱÖÓƵÂʳýÊýµÄÔ¤·ÖƵֵΪ(79+1),È¡Öµ·¶Î§0x0000~0xFFFF
TIM_TimeBaseInitStruct.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM1, &TIM_TimeBaseInitStruct ) ;
/* ¶¨Ê±Æ÷Êä³öͨµÀ1ģʽÅäÖà */
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;/* ģʽÅäÖãºPWMģʽ1 */
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; /* Êä³ö״̬ÉèÖãºÊ¹ÄÜÊä³ö */
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable; /* »¥²¹Í¨µÀÊä³ö״̬ÉèÖãºÊ¹ÄÜÊä³ö */
TIM_OCInitStructure.TIM_Pulse = 3000;/* ÉèÖÃÌø±äÖµ£¬µ±¼ÆÊýÆ÷¼ÆÊýµ½Õâ¸öֵʱ£¬µçƽ·¢ÉúÌø±ä */
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;/* µ±¶¨Ê±Æ÷¼ÆÊýֵСÓÚCCR1_ValʱΪ¸ßµçƽ */
TIM_OCInitStructure.TIM_OCNPolarity= TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCNIdleState_Reset;
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset;
TIM_OC1Init(TIM1, &TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;/* ģʽÅäÖãºPWMģʽ1 */
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; /* Êä³ö״̬ÉèÖãºÊ¹ÄÜÊä³ö */
TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable; /* »¥²¹Í¨µÀÊä³ö״̬ÉèÖãºÊ¹ÄÜÊä³ö */
TIM_OCInitStructure.TIM_Pulse = 3000;/* ÉèÖÃÌø±äÖµ£¬µ±¼ÆÊýÆ÷¼ÆÊýµ½Õâ¸öֵʱ£¬µçƽ·¢ÉúÌø±ä */
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;/* µ±¶¨Ê±Æ÷¼ÆÊýֵСÓÚCCR1_ValʱΪ¸ßµçƽ */
TIM_OCInitStructure.TIM_OCNPolarity= TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OCIdleState = TIM_OCNIdleState_Reset;
TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset;
TIM_OC2Init(TIM1, &TIM_OCInitStructure);
/* Automatic Output enable, Break, dead time and lock configuration*/
TIM_BDTRInitStructure.TIM_OSSRState = TIM_OSSRState_Enable;
TIM_BDTRInitStructure.TIM_OSSIState = TIM_OSSIState_Enable;
TIM_BDTRInitStructure.TIM_LOCKLevel = TIM_LOCKLevel_OFF;
TIM_BDTRInitStructure.TIM_DeadTime = 5;
TIM_BDTRInitStructure.TIM_Break = TIM_Break_Disable;
TIM_BDTRInitStructure.TIM_BreakPolarity = TIM_BreakPolarity_High;
TIM_BDTRInitStructure.TIM_AutomaticOutput = TIM_AutomaticOutput_Enable;
TIM_BDTRConfig(TIM1, &TIM_BDTRInitStructure);
TIM_OC1PreloadConfig(TIM1,TIM_OCPreload_Enable);
TIM_OC2PreloadConfig(TIM1,TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM1, ENABLE);/* ʹÄܶ¨Ê±Æ÷ÖØÔؼĴæÆ÷ARR */
TIM_Cmd(TIM1, ENABLE);/* ʹÄܶ¨Ê±Æ÷ */
TIM_CtrlPWMOutputs(TIM1, ENABLE); /* TIMÖ÷Êä³öʹÄÜ */
TIM_CCxCmd(TIM1,TIM_Channel_1,TIM_CCx_Enable);
TIM_CCxNCmd(TIM1,TIM_Channel_1,TIM_CCxN_Enable);
TIM_CCxCmd(TIM1,TIM_Channel_2,TIM_CCx_Enable);
TIM_CCxNCmd(TIM1,TIM_Channel_2,TIM_CCxN_Enable);
}根据设定温度值与采集温度值调节输出PWM占空比
if(SetTemperature>Temperature)
{
if(((SetTemperature-Temperature)*1200)>6000)TIM_SetCompare1(TIM1,6000);
else TIM_SetCompare1(TIM1,(SetTemperature-Temperature)*1200);
TIM_SetCompare2(TIM1,0);
TIM_CCxCmd(TIM1,TIM_Channel_1,TIM_CCx_Enable);
TIM_CCxCmd(TIM1,TIM_Channel_2,TIM_CCx_Disable);
GPIO_SetBits(GPIOB, GPIO_Pin_14);
GPIO_ResetBits(GPIOB, GPIO_Pin_13);
}
if(SetTemperature6000)TIM_SetCompare2(TIM1,6000);
else TIM_SetCompare2(TIM1,(Temperature-SetTemperature)*1200);
TIM_SetCompare1(TIM1,0);
TIM_CCxCmd(TIM1,TIM_Channel_1,TIM_CCx_Disable);
TIM_CCxCmd(TIM1,TIM_Channel_2,TIM_CCx_Enable);
GPIO_SetBits(GPIOB, GPIO_Pin_13);
GPIO_ResetBits(GPIOB, GPIO_Pin_14);
}