Linux 驱动架构简析
发表于我的博客网站(prajna.top): http://prajna.top/doc/3/3049 欢迎大家前去交流。
这篇文章不是驱动开发教程,只不过作者读过内核源码后,想对知识做一个梳理,从源码的角度分析一下Linux的驱动架构的实现。行文也不大讲究,希望可以把问题说清楚。本文使用的kernel 源码版本是 3.13.3。
学习kernel虽然没有捷径,但是有合理的方法。
1) 首先,需要熟悉操作系统的设计与实现,推荐大家看 MINIX作者的那部书,同时把MINIX的kernel代码研读一下。 不然,你不知道操作系统都有哪些模块, 不知道操作系统要做些什么事情,提供什么功能。简单地说,操作系统首先要驱动 CPU,然后提供那几大管理(进程,内存,文件),实现一两百个系统呼叫,提供驱动接口, 用户态与内核之间进行切换。
2) 去intel的官网,找一下 ‘Intel® 64 and IA-32 Architectures Software Developer’s Manual’ , 了解一下 CPU的架构,工作模式,底层编码。否则, 你不知道 gdt,ldt,page table,实地址,保护模式,定时器中断都是什么东西,为什么操作系统要这样来设置寄存器。这块基本上全汇编语言,对CPU的初始化,寄存器设置,手册上面都有严格的时需要求。 哪些操作需要屏蔽中断,哪些需要在一个指令周期完成等等。有了上面的基础后,大概知道一个操作系统大概要做些什么事情, 如何驱动底层的 CPU,这个时候阅读 linux的kernel代码,事半功倍。
kernel分为两个模块:一个是core: cpu, 中断,进程,内存几大管理, 提供系统呼叫。另一个是driver。 linux的driver 都是有架构的,不需要从底层做起。各类架构称为‘子系统’:如,block子系统,net子系统,usb子系统等。 别看操作系统的代码量大,其实,driver占了估计 80%的代码量, 这些都是不需要去看的。驱动是否放在内核,就是微内核与宏内核的区别。
阅读源码过程中,观其大略即可,主要了解整个结构,以及程序的流程。如:系统呼叫的调用,追一个就可以了—— 看看操作系统如何捕捉软中断, 根据中断号,dispatch到相应的服务程序,如何保存现场, 完成后,又如何回到用户态。 系统呼叫调用,核心就是 dispatch的流程。 追完一支系统呼叫,其它的大概就知道怎么回事了。driver 也就一样的, 找个简单的驱动看看, 从驱动层一直到驱动的架构,流程清楚就可以了。 如字符设备驱动, 追一下注册后, 驱动框架如何把该设备放入 list,当有用户请求的时候,它又如何查找到相应的设备,调用相应的操作函数, 一路追下来,流程大概就清楚了。
不建议一开始就阅读“linux内核源码分析” 之类的书, 会让读者一头雾水。 正确的方法应该是, 先了解相应的背景知识后,再来阅读源码。Driver 框架的源码的位于 drivers/base/, 它是整个驱动模式的基础框架,相当于OO语言的里面的Object对象。 其实,Linux 的驱动框架就是一个OO的结构, core模块定义数据结构,函数接口,实现各种通用的功能——相当于OO里面的基类。各模块的设备驱动程序则只需要实现 core模块里面定义的接口即可。
bus, driver, device 框架
linux的外围设备驱动,都是通过 bus + driver + device来管理的,其实也好理解 ,外设都是通过总线来与cpu通讯的。kernel会实现各种总线的规范以及设备管理(设备检测,驱动绑定等),驱动程序只需要注册自己的驱动,实现对设备的读写控制即可。
这类驱动通常是2个层次:总线子系统 + 驱动模块,它的流程大概是:
1) bus_register(xx)
kernel里面的各bus子系统(如:serio, usb, pci, ...)会使用该函数来注册自己。
2) driver_register(xx)
驱动模块使用它来向总线系统注册自己,这样驱动模块只需要关注相应driver接口的实现。通常,bus子系统会对 driver_register来进行封装,如:
- serio 提供serio_register_driver()
- usb 提供usb_register_driver()
- pci提供 pci_register_driver()
3) registe_device(xx)
各总线除了管理driver外,还管理device,通常会提供一支API来添加设备,如: input_register_device, serio_add_port.实现上都是通过一个链表对设备进行管理,通常是在初始化或者probe的时候, 添加设备。
设备(device)指的是具体实现总线协议的物理设备,如对serio总线而言,i8042就是它的一个设备,而该总线连接的设备(鼠标,键盘)则是一个serio driver。
注册
bus.c 和 driver.c 分别对 bus,driver和device进行管理,提供注册bus, driver和查找 device 功能。
bus_register(*bus) 这个函数会生成两个list,用来保存设备和驱动。
INIT_LIST_HEAD(&priv->interfaces);
klist_init(&priv->klist_devices, klist_devices_get, klist_devices_put);
klist_init(&priv->klist_drivers, NULL, NULL);
* priv是 struct subsys_private定义在 driver/base/base.hdriver_register(*drv) 实际上就是调用 bus_add_driver(*drv) 把 drv 添加到 klist_drivers:
klist_add_tail(&priv->knode_bus, &bus->p->klist_drivers);同理注册device,也是通过 bus_add_device(*dev),添加到 klist_devices:
klist_add_tail(&dev->p->knode_bus, &bus->p->klist_devices);以 hid_bus_type为例,执行 bus_register(&hid_bus_type) 后, hid_bus_type->p->klist_devices 和 hid_bus_type->p->klist_klist_drivers 这两个list 会被初始化,为后面的 driver和 device 注册做准备,driver数据结构如下:
static struct hid_driver tpkbd_driver = {
.name = "lenovo_tpkbd",
.id_table = tpkbd_devices,
.input_mapping = tpkbd_input_mapping,
.probe = tpkbd_probe,
.remove = tpkbd_remove,
};注册driver时,它先经过 __hid_register_driver(&tpkbd_driver),设置一些基本参数。
hdrv->driver.bus = &hid_bus_type;
.....
driver_register(&hdrv->driver);设置'driver.bus'字段后,driver和bus的对应关系就建立起来了。 然后, 经过 driver_register 后,hid_bus_type->p->list_drivers 保存了 tpkbd_driver.
Q: driver模块是不知道 hid_driver 这个数据结构的,它如何能把它的指针放到list里面呢?
答案是”不能”, list_drivers 是不能保存 hid_driver 指针的。driver模块提供了一个接口: 'struct device_driver' , hid_driver 这个结构里面需要包含该结构。
struct hid_driver {
const struct hid_device_id *id_table;
/* private: */
struct device_driver driver;
}注册的时候,取的是 driver 字段的地址,也就是 hid_driver.driver 的指针, driver_register(&hdrv->driver); 当从 driver模块 callback 到 hid-core模块的时候, 如
static int hid_bus_match(struct device *dev, struct device_driver *drv)
{
struct hid_driver *hdrv = container_of(drv, struct hid_driver, driver);
struct hid_device *hdev = container_of(dev, struct hid_device, dev);
return hid_match_device(hdev, hdrv) != NULL;
}使用 container_of 就把 hid_driver.driver 的指针转换成了hid_driver 的指针--这个方法类似 OO编程里面使用基类指针指向派生类对象。Linux普通使用这个方法,来构建框架。
device和driver绑定
当增加新device的时候,bus 会轮循它的驱动列表来找到一个匹配的驱动,它们是通过device id和 driver的id_table来进行 ”匹配”的,主要是在 driver_match_device()[drivers/base/base.h] 通过 bus->match() 这个callback来让驱动判断是否支持该设备,一旦匹配成功,device的driver字段会被设置成相应的driver指针 :
really_probe()
{
dev->driver = drv;
if (dev->bus->probe) {
ret = dev->bus->probe(dev);
...
} else if (drv->probe) {
ret = drv->probe(dev);
...
}
}然后 callback 该 driver 的 probe 或者 connect 函数,进行一些初始化操作。
同理,当增加新的driver时,bus也会执行相同的动作,为驱动查找设备。因此,绑定发生在两个阶段:
1: 驱动找设备,发生在driver向bus系统注册自己时候,函数调用链是:
driver_register --> bus_add_driver --> driver_attach() [dd.c] -- 将轮循device链表,查找匹配的device。
2: 设备查找驱动,发生在设备增加到总线的的时候,函数调用链是:
device_add --> bus_probe_device --> device_initial_probe --> device_attach -- 将轮循driver链表,查找匹配的driver。
匹配成功后,系统继续调用 driver_probe_device() 来 callback 'drv->probe(dev)' 或者 'bus->probe(dev) -->drv->connect(),在probe或者connect函数里面,驱动开始实际的初始化操作。因此,probe() 或者 connect() 是真正的驱动'入口'。
对驱动开发者而言,最基本是两个步骤:
- 定义device id table.
- probe()或connect()开始具体的初始化工作。
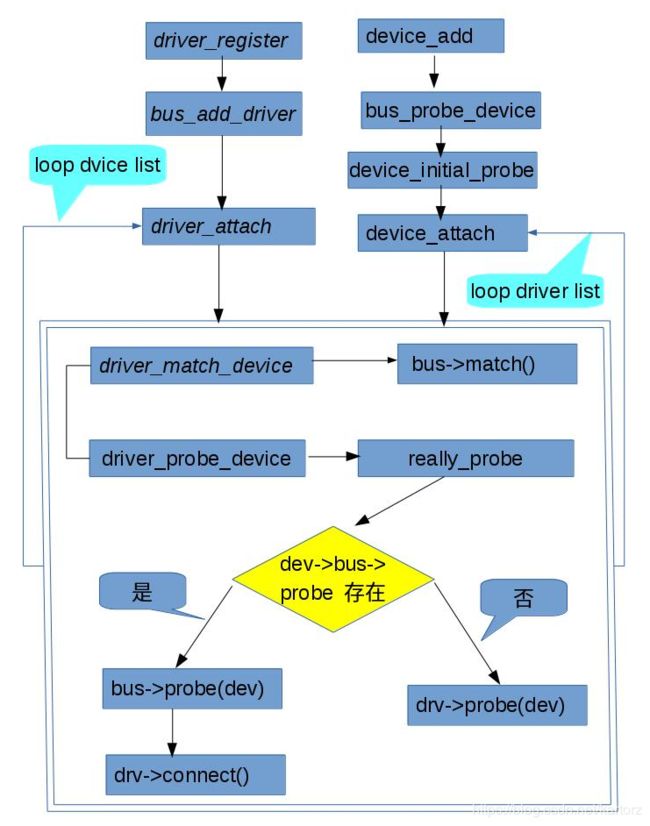
(driver和device注册流程图)
实例分析:atkbd键盘驱动
Serio Bus 主要是支持 PS/2,串口等串行设备协议,物理上可以通过i8042控制芯片来连接PS/2的鼠标或键盘,它的架构是:
- serio.c 实现总线框架。
- serio_register_port 注册底层读写设备-- port就是 serio的底层通讯设备, 它执行serio总线的底层读写。
- serio_register_driver 注册驱动,与port进行绑定,利用port进行底层的读写通讯。
atkbd 驱动注册的时侯,需指定它支持的port类型。
serio->id.type = SERIO_8042; //表明驱动需要8042的支持。
serio_register_driver() // 注册自己, 根据设备id绑定相应的 port(本例中是8042)。
作为serio的port, i8042 通过 serio_register_port 来注册,生成serio对象,这样驱动程序就可以通过 serio->wirte/read 来调用i8042进行底层的通讯。 数据流程框图如下:
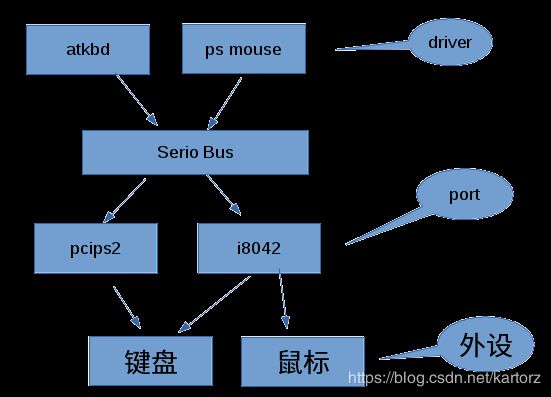
driver 通过 bus 匹配 port,通过port与外设通讯。
我们可以在sys接口 [/sys/bus/serio/] 目录下找到设备和驱动的相关信息,里面的内容可以通过 DEVICE_ATTR_XX 系列宏定义来添加。 port 的命令规则是serio0, serio1, serioN 是自动增加的。
dev_set_name(&serio->dev, "serio%ld", (long)atomic_inc_return(&serio_no) - 1);atkbd注册serio驱动后,还需要注册input设备,它需要实现input子系统的接口,作为一个input设备工作。input.c 定义了callback 和公用接口,子模块实现相应接口。
keybord: drivers/input/keyboard/atkbd.c
注册设备
atkbd.c: atkbd_connect → input_register_device()Input子系统通过event 字符设备来与应用程序进行通讯。
evdev.c: evdev_init → input_register_handler → ....
cdev_init(xx, fops) // 处理 /dev/input/eventX的读写操作。atkdb通过注册Serio Bus 驱动和Input device来打通从应用程序到外设通讯链路:
application --> /dev/input/eventX --> Input 子系统 --> atkdb驱动 --> serio bus --> i8042 port --> 物理键盘。
我们可以看到字符设备主要是用来提供应用层接口,Bus框架则用来管理外设驱动。
Input提供了proc文件接口,可以查看相应的信息。
cat /proc/bus/input/devices : 可以得到某个设备的event number.
cat /proc/bus/input/handlers通过cat eventX可以得到按键产生input_event,查看 event里面的原始数据
sudo cat /dev/input/eventXX | hexdump
XX: event number.USB
以usb serial的代码为例来说明一下usb总线驱动的基本工作流程。
注册
struct usb_driver *udriver = kzalloc(sizeof(*udriver), GFP_KERNEL);
udriver->name = "usb_ftdi";
udriver->probe = usb_ftdi_probe;
rc = usb_register(udriver);
udriver->id_table = id_table;
rc = driver_attach(&udriver->drvwrap.driver);先创建一个udriver --
- probe 函数用来做硬件初始化
- id_table用来标识驱动支持的芯片类型,用于匹配外设。
- usb_register 注册到usb总线
- driver_attach 插入驱动。
插入驱动后,将会与usb的底层设备(hub)进行绑定。hub在初始化的时侯,会开启一个任务来检测端口的变化,并使用缺省的"endpoint"来枚举外设,得到它的“接口描述符”,与驱动绑定后,会把该外设的信息通过 probe函数回传给驱动,通过id比对后,找到对应的外设驱动,在usb_ftdi_probe 函数进行具体的驱动初始化。
通讯
USB设备框架是 device --> interface --> endpoint。如某个设备拥有音频和存储两个功能,那么它有"音频接口“和“存储接口”,每个接口又包含几个通讯“端点”,用来同主机通讯。其中“endpoint 0” 是缺省的通讯端点,主机通过它来读取设备的各种信息--在usb的规范里称为“描述符”,如:设备描述符,接口描述符,端点描述符,每个设备都要提供一套usb的“标志描述符”供主机来枚举它。
usb_ftdi_probe首先分析“接口描述符”,得到它的端口信息--
for (i = 0; i < iface_desc->desc.bNumEndpoints; ++i) {
epd = &iface_desc->endpoint[i].desc;
if (usb_endpoint_is_bulk_in(epd)) {
...
} else if (usb_endpoint_is_bulk_out(epd)) {
...
} else if (usb_endpoint_is_int_in(epd)) {
...
} else if (usb_endpoint_is_int_out(epd)) {
...
}
}usb共有4类“端点”--
- bulk : 用于大量的数据传输,如:U盘。
- Control : 控制信息传输。
- Interrupt : 低频低延时数据传输。
- Isochronal: 周期性数据传输。
驱动需要在probe函数分析“端点描述符”来创建相应的端点,每个“端点”都有IN/OUT两个方向--
- IN : Host 读取 设备数据。
- OUT : Host 写数据到设备。
控制管道
endpoint 0是usb协议的标准控制端点,主机通过这个端点来枚举设备,读取它的信息。usb_control_msg 这个函数通过"控制管道"来读写外设的'寄存器',核心参数是 "Request", "Request Type","wWalue"和"wIndex"。具体参数值需要向设备制造查询,如果是通用设备可以直接查询相应的规范。
以FTDI_SIO_GET_MODEM_STATUS 为例:
/*
* BmRequestType: 1100 0000b
* bRequest: 5
* wValue: zero
* wIndex: Port
* wLength: 1
* Data: Status
*/
usb_control_msg(dev, usb_rcvctrlpipe(dev, 0),
5, 0xC0, 0, priv->port,
buf, 1, WDR_TIMEOUT);根据设备的定义,我们得到的参数如下:
- request -- 6
- requesttype -- 0xC0
- wValue -- 0
- wIndex -- Port (在设备的描述符里找回)
usb_rcvctrlpipe(dev, 0),创建一个读的“管道”,使用的是默认的控制端点0。
下面是一个设置"波特率"的例子:
#define FTDI_SIO_SET_BAUDRATE_REQUEST_TYPE 0x40
#define FTDI_SIO_SET_BAUDRATE_REQUEST 3
/*
* BmRequestType: 0100 0000B
* bRequest: FTDI_SIO_SET_BAUDRATE
* wValue: BaudDivisor value - see below
* wIndex: Port
* wLength: 0
* Data: None
*/具体调用如下:
usb_control_msg(port->serial->dev,
usb_sndctrlpipe(port->serial->dev, 0),
FTDI_SIO_SET_BAUDRATE_REQUEST,
FTDI_SIO_SET_BAUDRATE_REQUEST_TYPE,
1, port,
NULL, 0, WDR_SHORT_TIMEOUT);usb_sndctrlpipe(dev, 0),创建默认(端点0)的写控制“管道”,由于只是改命令无 附加数据,buf参数是'NULL',长度是'0',其它的核心参数,根据协议规范写入即可。
Bulk 管道
bulk 用于大量的数据传输,数据封装在urb里,urb 全称为"USB Request Block" ,类似于网络的IP包,它由Host调度,通过层次的hub传递到设备。USB2是主机对从机的单向通讯,读写数据都由主机来发动。
Host写数据到设备
usb_fill_bulk_urb(port->write_urbs[i], udev,
usb_sndbulkpipe(udev, epd->bEndpointAddress),
port->bulk_out_buffers[i], buffer_size,
write_bulk_callback, port);
usb_submit_urb(urb, mem_flags); // 启动
void write_bulk_callback(struct urb *urb) {
count = port->serial->type->prepare_write_buffer(
port, urb->transfer_buffer, port->bulk_out_size);
urb->transfer_buffer_length = count;
result = usb_submit_urb(urb, mem_flags);
}如上图的示例代码,它是一个连续传输数据的流程,
首先,usb_fill_bulk_urb --
- usb_sndbulkpipe 定义一个主机输出的管道。
- port->bulk_out_buffers[i]和buffer_size 提供数据缓冲和大小。
- write_bulk_callback, urb传输完成后的callback。
其次, usb_submit_urb -- 启动"写数据",提交urb到主机去调度。
最后,定义 write_bulk_callback 函数 --
- 更新数据缓冲区。
- 再次usb_submit_urb ,轮循调用这个callback,直到数据传输完毕,如果数据可以一次性传输完成的,就不需要定义这个 callback了。
Host 从设备读取数据
usb_fill_bulk_urb(port->read_urbs[i], udev,
usb_rcvbulkpipe(udev, epd->bEndpointAddress),
port->bulk_in_buffers[i], buffer_size,
type->read_bulk_callback, port);
usb_submit_urb(port->read_urbs[index], mem_flags); // 启动
static void read_bulk_callback(struct urb *urb) {
for (i = 0; i < urb->actual_length; i++)
printk(KERN_CONT " 0x%x", urb->transfer_buffer[i]);
usb_submit_urb(port->read_urbs[urbinx], GFP_ATOMIC);
}上面的代码则是一个连续读取数据的流程,
首先,usb_fill_bulk_urb --
- usb_rcvbulkpipe 定义一个主机输出的管道。
- port->bulk_in_buffers[i]和buffer_size 提供数据缓冲和大小。
- read_bulk_callback, urb传输完成后的callback。
其次, usb_submit_urb -- 启动"读数据",提交urb到主机去调度。
最后,定义 read_bulk_callback 函数 --
- 提取缓冲区的数据。
- 再次usb_submit_urb ,轮循调用这个callback,直到数据传输完毕,如果不需要再读取数据,就不要再提交 urb。
从上面例子可以看出,bulk的读写流程都是先创建urb,然后使用 usb_submit_urb来启动读写,在callback里面处理数据,如果需要继续读写,则在callback函数里,再次调用 usb_submit_urb。
Interrupt 管道
通讯流程同bulk,只是 usb_fill_int_urb 多了一个 'interval' 参数,用来设置它的调度时间,可以进行一些时序控制。
Isochronal 管道
用来传输一定速率的数据,如:音视频流。速率通过 'interval' 参数来设置,驱动通过循环检测 URB的状态,来持续写入/读取数据。
块设备
块设备指的是存储设备,块设备驱动就是存储驱动如:HD,SSD。它不同于外设驱动,Linux 用 Block 子系统对它们进行管理,把应用层的IO读写请求,转变为Request ,传给相应的块设备驱动。
那么文件系统与Block子系统是什么关系呢?
Block子系统主要是提供最底层的数据读写,也就是raw io,文件系统使用它进行IO操作,文件系统只专注于文件系统格式,以读取分区为例: 文件系统在初始化阶段,会call blkdev_get, 如果块设备还没有初始化,blkdev_get 则 调用块设备的 rescan_partitions, 去扫描分区,初始化设备。

注册
#define FR_MAJOR 310
#define DEVICE_NAME "fooram"
注册块设备(主设备号)
register_blkdev(FR_MAJOR, DEVICE_NAME);
unregister_blkdev(FR_MAJOR,DEVICE_NAME);
注册设备(MAJOR, MINOR)
blk_register_region(MKDEV(FR_MAJOR, 0),1, ....);
blk_unregister_region(MKDEV(FR_MAJOR, 0),1, ...);添加磁盘
dev->gd = alloc_disk(1);
dev->queue =blk_mq_init_queue(&dev→tag_set); //初始化请求队列
dev->gd->major = FR_MAJOR;
dev->gd->first_minor = 0;
dev->gd->fops = &fr_fops;
dev->gd->queue = dev->queue;
dev->gd->private_data = dev;
sprintf (dev->gd->disk_name, "frd0");
set_capacity(dev->gd, size);
add_disk(dev->gd);初始化请求队列
struct blk_mq_tag_set tag_set;
dev->tag_set.ops = &fr_mq_ops;
dev->tag_set.nr_hw_queues = 1;
dev->tag_set.queue_depth = 16;
dev->tag_set.numa_node = NUMA_NO_NODE;
dev->tag_set.flags = BLK_MQ_F_SHOULD_MERGE;
dev->tag_set.driver_data = dev;
err = blk_mq_alloc_tag_set(&dev->tag_set);
dev->queue = blk_mq_init_queue(&dev→tag_set);
static struct blk_mq_ops fr_mq_ops = {
.queue_rq = fr_queue_rq,
.map_queue = blk_mq_map_queue,
};初始化请求队列是添加磁盘的核心操作,块设备驱动的核心就是围绕着“请求队列”来展开,它的核心任务就是优化这个队列读写请求。当add_disk把磁盘加入系统后,请求队列就随时可以调度了。
处理设备请求
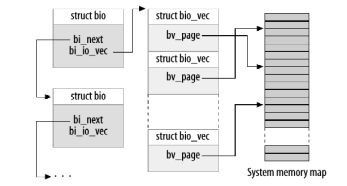
BIO 数据结构
Request Queue
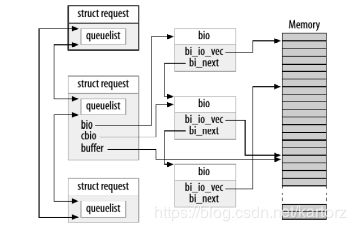
请求队列的每个"请求"(struct request)都包含着一个bio队列,bio结构里面就是设备的寻址(扇区,长度)和对应的内存空间。 “读”请求就是把设备对应的扇区写到相应的内存空间,“写”请求则刚好相反,把内存的数据写入相应的扇区。最简单的驱动就是用一个循环,依次处理各个请求,进行底层的IO读写,如:
Loop处理请求 (fr_queue_rq)
rq_for_each_segment (bvec, rq, iter) {
char *buffer = kmap_atomic(bvec.bv_page) + bvec.bv_offset;
unsigned nsecs = bvec.bv_len >> 9;
fr_transfer(dev, sector, nsecs, buffer, write);
sector += nsecs;
kunmap_atomic(buffer);
}设备读写数据(fr_transfer)
这个函数就是具体存储设备的底层读写操作,PCI设备可以用PCI_WRITE来写数据,USB设备也可以使用 BULK管道来传输数据。下面的示例代码没有物理设备是一个ram disk,简单地用memcpy 来传输数据。
loff_t pos = sector << SECTOR_SHIFT; //起始扇区
loff_t len = nsecs << SECTOR_SHIFT; // Size
//底层IO 如,PCI_WRITE(IOBase, register add,);
if (write)
memcpy(dev->data + pos, buffer, len);
else
memcpy(buffer, dev->data + pos, len);
参考资料
1: Linux 3.13源码。
2: Linux Device Drivers。
---
欢迎大家来我的网站交流: 般若程序蝉 