Scipy:高端科学计算
原文地址 : 点击打开链接
作者:Adrien Chauve, Andre Espaze, Emmanuelle Gouillart, Ga?l Varoquaux, Ralf Gommers
翻译自:scipy lecture notes
译者表示最后部分没怎么看懂,此文档维护中……Scipy
scipy包包含致力于科学计算中常见问题的各个工具箱。它的不同子模块相应于不同的应用。像插值,积分,优化,图像处理,,特殊函数等等。
scipy可以与其它标准科学计算程序库进行比较,比如GSL(GNU C或C++科学计算库),或者Matlab工具箱。scipy是Python中科学计算程序的核心包;它用于有效地计算numpy矩阵,来让numpy和scipy协同工作。
在实现一个程序之前,值得检查下所需的数据处理方式是否已经在scipy中存在了。作为非专业程序员,科学家总是喜欢重新发明造轮子,导致了充满漏洞的,未经优化的,很难分享和维护的代码。相反,Scipy程序经过优化和测试,因此应该尽可能使用。
目录
- 文件输入/输出:scipy.io
- 特殊函数:scipy.special
- 线性代数运算:scipy.linalg
- 快速傅里叶变换:scipy.fftpack
- 工作示例:找到原始周期
- 工作示例:高斯图像模糊
- 优化和拟合:scipy.optimize
- 统计和随机数: scipy.stats
- 直方图和概率密度函数
- 百分位
- 统计检测
- 插值:scipy.interpolate
- 数值积分:scipy.integrateFusy,
- 信号处理:scipy.signal
- 图像处理:scipy.ndimage
- 图像的几何变换
- 图像滤镜
- 数学形态学
- 图像测量
- 总结练习
- Footnotes
警告:这个教程离真正的数值计算介绍很远。因为枚举scipy中不同的子模块和函数非常无聊,我们集中精力代之以几个例子来给出如何使用`scipy`进行计算的大致思想。
scipy 由一些特定功能的子模块组成:
| 模块 | 功能 |
|---|---|
| scipy.cluster | 矢量量化 / K-均值 |
| scipy.constants | 物理和数学常数 |
| scipy.fftpack | 傅里叶变换 |
| scipy.integrate | 积分程序 |
| scipy.interpolate | 插值 |
| scipy.io | 数据输入输出 |
| scipy.linalg | 线性代数程序 |
| scipy.ndimage | n维图像包 |
| scipy.odr | 正交距离回归 |
| scipy.optimize | 优化 |
| scipy.signal | 信号处理 |
| scipy.sparse | 稀疏矩阵 |
| scipy.spatial | 空间数据结构和算法 |
| scipy.special | 任何特殊数学函数 |
| scipy.stats | 统计 |
它们全依赖numpy,但是每个之间基本独立。导入Numpy和这些scipy模块的标准方式是:
import numpy as np from scipy import stats # 其它子模块相同
主scipy命名空间大多包含真正的numpy函数(尝试 scipy.cos 就是 np.cos)。这些仅仅是由于历史原因,通常没有理由在你的代码中使用import scipy
文件输入/输出:scipy.io
-
导入和保存matlab文件:
In [1]: from scipy import io as spio In [3]: import numpy as np In [4]: a = np.ones((3, 3)) In [5]: spio.savemat('file.mat', {'a': a}) # savemat expects a dictionary /usr/lib/python2.7/site-packages/scipy/io/matlab/mio.py:266: FutureWarning: Using oned_as default value ('column') This will change to 'row' in future versions oned_as=oned_as) In [6]: data = spio.loadmat('file.mat', struct_as_record=True) In [7]: data['a'] Out[7]: array([[ 1., 1., 1.], [ 1., 1., 1.], [ 1., 1., 1.]]) -
读取图片:
In [16]: from scipy import misc In [17]: misc.imread('scikit.png') Out[17]: array([[[255, 255, 255, 255], [255, 255, 255, 255], [255, 255, 255, 255], ..., [255, 255, 255, 255], [255, 255, 255, 255], [255, 255, 255, 255]], [[255, 255, 255, 255], [255, 255, 255, 255], [255, 255, 255, 255], ..., [255, 255, 255, 255], [255, 255, 255, 255], [255, 255, 255, 255]], [[255, 255, 255, 255], [255, 255, 255, 255], [255, 255, 255, 255], ..., [255, 255, 255, 255], [255, 255, 255, 255], [255, 255, 255, 255]], ..., [[255, 255, 255, 255], [255, 255, 255, 255], [255, 255, 255, 255], ..., [255, 255, 255, 255], [255, 255, 255, 255], [255, 255, 255, 255]], [[255, 255, 255, 255], [255, 255, 255, 255], [255, 255, 255, 255], ..., [255, 255, 255, 255], [255, 255, 255, 255], [255, 255, 255, 255]], [[255, 255, 255, 255], [255, 255, 255, 255], [255, 255, 255, 255], ..., [255, 255, 255, 255], [255, 255, 255, 255], [255, 255, 255, 255]]], dtype=uint8) In [18]: import matplotlib.pyplot as plt In [19]: plt.imread('scikit.png') Out[19]: array([[[ 1., 1., 1., 1.], [ 1., 1., 1., 1.], [ 1., 1., 1., 1.], ..., [ 1., 1., 1., 1.], [ 1., 1., 1., 1.], [ 1., 1., 1., 1.]], [[ 1., 1., 1., 1.], [ 1., 1., 1., 1.], [ 1., 1., 1., 1.], ..., [ 1., 1., 1., 1.], [ 1., 1., 1., 1.], [ 1., 1., 1., 1.]], [[ 1., 1., 1., 1.], [ 1., 1., 1., 1.], [ 1., 1., 1., 1.], ..., [ 1., 1., 1., 1.], [ 1., 1., 1., 1.], [ 1., 1., 1., 1.]], ..., [[ 1., 1., 1., 1.], [ 1., 1., 1., 1.], [ 1., 1., 1., 1.], ..., [ 1., 1., 1., 1.], [ 1., 1., 1., 1.], [ 1., 1., 1., 1.]], [[ 1., 1., 1., 1.], [ 1., 1., 1., 1.], [ 1., 1., 1., 1.], ..., [ 1., 1., 1., 1.], [ 1., 1., 1., 1.], [ 1., 1., 1., 1.]], [[ 1., 1., 1., 1.], [ 1., 1., 1., 1.], [ 1., 1., 1., 1.], ..., [ 1., 1., 1., 1.], [ 1., 1., 1., 1.], [ 1., 1., 1., 1.]]], dtype=float32)
参见:
- 载入txt文件:numpy.loadtxt()/numpy.savetxt()
- 智能导入文本/csv文件:numpy.genfromtxt()/numpy.recfromcsv()
- 高速,有效率但numpy特有的二进制格式:numpy.save()/numpy.load()
特殊函数:scipy.special
特殊函数是先验函数。scipy.special的文档字符串写得非常好,所以我们不在这里列出所有函数。常用的有:
- 贝塞尔函数,如scipy.special.jn()(整数n阶贝塞尔函数)
- 椭圆函数(scipy.special.ellipj()雅可比椭圆函数,……)
- 伽马函数:scipy.special.gamma(),还要注意scipy.special.gammaln,这个函数给出对数坐标的伽马函数,因此有更高的数值精度。
线性代数运算:scipy.linalg
scipy.linalg模块提供标准线性代数运算,依赖于底层有效率的实现(BLAS,LAPACK)。
-
scipy.linalg.det()函数计算方阵的行列式:
In [22]: from scipy import linalg In [23]: arr = np.array([[1, 2], ....: [3, 4]]) In [24]: linalg.det(arr) Out[24]: -2.0 In [25]: linalg.det(np.ones((3,4))) --------------------------------------------------------------------------- ValueError Traceback (most recent call last)in () ----> 1 linalg.det(np.ones((3,4))) /usr/lib/python2.7/site-packages/scipy/linalg/basic.pyc in det(a, overwrite_a) 398 a1 = np.asarray_chkfinite(a) 399 if len(a1.shape) != 2 or a1.shape[0] != a1.shape[1]: --> 400 raise ValueError('expected square matrix') 401 overwrite_a = overwrite_a or _datacopied(a1, a) 402 fdet, = get_flinalg_funcs(('det',), (a1,)) ValueError: expected square matrix
py.linalg.inv()`函数计算方阵的逆:
In [26]: arr = np.array([[1, 2],
[3, 4]])
In [27]: iarr = linalg.inv(arr)
In [28]: iarr
Out[28]:
array([[-2. , 1. ],
[ 1.5, -0.5]])
In [29]: np.allclose(np.dot(arr, iarr), np.eye(2))
Out[29]: True
最后计算奇异阵的逆(它的行列式为0)将会引发(raise)LinAlgError:
In [32]: arr = np.array([[3, 2],
[6, 4]])
In [33]: linalg.inv(arr)
---------------------------------------------------------------------------
LinAlgError Traceback (most recent call last)
in ()
----> 1 linalg.inv(arr)
/usr/lib/python2.7/site-packages/scipy/linalg/basic.pyc in inv(a, overwrite_a)
346 inv_a, info = getri(lu, piv, overwrite_lu=1)
347 if info > 0:
--> 348 raise LinAlgError("singular matrix")
349 if info < 0:
350 raise ValueError('illegal value in %d-th argument of internal '
LinAlgError: singular matrix
-
还有更多高级运算,如奇异值分解(SVD):
In [34]: arr = np.arange(9).reshape((3, 3)) + np.diag([1, 0, 1]) In [35]: uarr, spec, vharr = linalg.svd(arr)它的结果数组谱是:
In [36]: spec Out[36]: array([ 14.88982544, 0.45294236, 0.29654967])
原始矩阵可以由svd的输出用np.dot点乘重新组合得到:
In [37]: sarr = np.diag(spec) In [38]: svd_mat = uarr.dot(sarr).dot(vharr) In [39]: np.allclose(svd_mat, arr) Out[39]: True
SVD在信号处理和统计中运用很广。许多其它标准分解(QR,LU,Cholesky,Schur),还有线性系统的解也可以从scipy.linalg中获得。
快速傅里叶变换:scipy.fftpack
scipy.fftpack模块用来计算快速傅里叶变换。作为示例,一个(噪声)输入信号可能像这样:
In [40]: time_step = 0.02
In [41]: period = 5
In [42]: time_vec = np.arange(0, 20, time_step)
In [43]: sig = np.sin(2 * np.pi / period * time_vec) + \
....: 0.5 * np.random.randn(time_vec.size)
观测者并不指导信号频率,仅仅等间隔取样信号sig。信号应该来自一个真实的函数所以傅里叶变换将是对称的。scipy.fftpack.fftfreq()函数将生成取样频率,scipy.fftpack.fft()将计算快速傅里叶变换:
因为功率结果是对称的,仅仅需要使用谱的正值部分来找出频率:
In [48]: pidxs = np.where(sample_freq > 0) In [49]: freqs = sample_freq[pidxs] In [50]: power = np.abs(sig_fft)[pidxs]
信号频率可以这样被找到:
In [51]: freq = freqs[power.argmax()] In [52]: np.allclose(freq, 1./period) Out[52]: True
现在高频噪声将被从傅里叶变换信号中移除:
In [53]: sig_fft[np.abs(sample_freq) > freq] = 0
得到滤波信号,可以用scipy.fftpack.ifft函数计算:
In [54]: main_sig = fftpack.ifft(sig_fft)
结果可以这样可视化:
In [55]: plt.figure() Out[55]:In [56]: plt.plot(time_vec, sig) Out[56]: [ ] In [57]: plt.plot(time_vec, main_sig, linewidth=3) /usr/lib/python2.7/site-packages/numpy/core/numeric.py:320: ComplexWarning: Casting complex values to real discards the imaginary part return array(a, dtype, copy=False, order=order) Out[57]: [ ] In [58]: plt.xlabel('Time [s]') Out[58]: In [59]: plt.ylabel('Amplitude') Out[59]: In [60]: plt.show()
numpy.fft
Numpy也有一个FFT实现(numpy.fft)。然而,通常scipy的应该优先使用,因为它使用了更有效率的底层实现。
工作示例:找到原始周期
source code
source code
工作示例:高斯图像模糊
卷积:
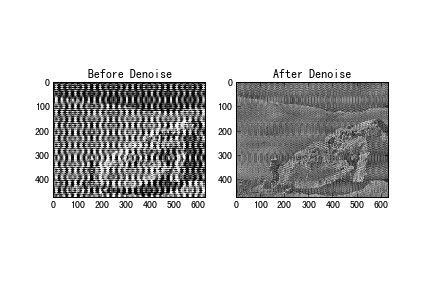
练习:登月图片消噪
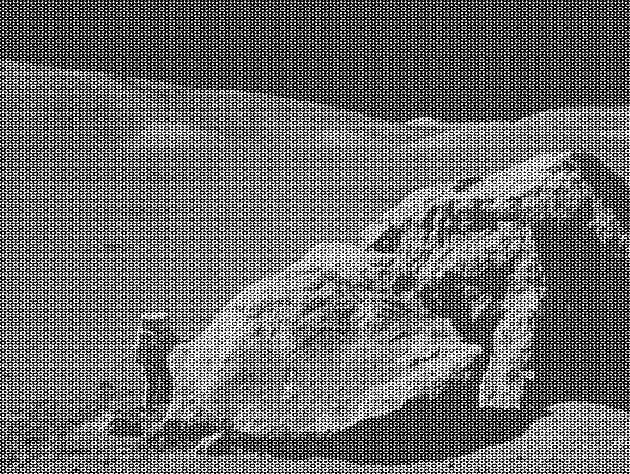
- 检查提供的图像moonlanding.png,该图像被周期噪声严重污染了。在这个练习中,我们旨在使用快速傅里叶变换清除噪声。
- 用plt.imread加载图像。
- 使用scipy.fftpack中的2-D傅里叶函数找到并绘制图像的谱线(傅里叶变换)。可视化这个谱线对你有问题吗?如果有,为什么?
- 这个谱包含高频和低频成分。噪声是在谱线的高频部分中,所以设置一些成分为0(使用数组切片)。
- 应用逆傅里叶变换来看最后的图像。
优化和拟合:scipy.optimize
优化是找到最小值或等式的数值解的问题。
scipy.optimization子模块提供了函数最小值(标量或多维)、曲线拟合和寻找等式的根的有用算法。
from scipy import optimize
找到标量函数的最小值
让我们定义以下函数
In [2]: def f(x): ...: return x**2 + 10 * np.sin(x)
然后绘制它:
In [3]: x = np.arange(-10, 10, 0.1) In [4]: plt.plot(x, f(x)) Out[4]: [] In [5]: plt.show()
该函数在大约-1.3有个全局最小值,在3.8有个局部最小值。
找到这个函数最小值一般而有效的方法是从初始点使用梯度下降法。BFGS算法1是做这个的好方法:
In [6]: optimize.fmin_bfgs(f, 0)
Optimization terminated successfully.
Current function value: -7.945823
Iterations: 5
Function evaluations: 24
Gradient evaluations: 8
Out[6]: array([-1.30644003])
这个方法一个可能的问题在于,如果函数有局部最小值,算法会因初始点不同找到这些局部最小而不是全局最小:
In [7]: optimize.fmin_bfgs(f, 3, disp=0) Out[7]: array([ 3.83746663])
如果我们不知道全局最小值的邻近值来选定初始点,我们需要借助于耗费资源些的全局优化。为了找到全局最小点,最简单的算法是蛮力算法2,该算法求出给定格点的每个函数值。
In [10]: grid = (-10, 10, 0.1) In [11]: xmin_global = optimize.brute(f, (grid,)) In [12]: xmin_global Out[12]: array([-1.30641113])
对于大点的格点,scipy.optimize.brute()变得非常慢。scipy.optimize.anneal()提供了使用模拟退火的替代函数。对已知的不同类别全局优化问题存在更有效率的算法,但这已经超出scipy的范围。一些有用全局优化软件包是OpenOpt、IPOPT、PyGMO和PyEvolve。
为了找到局部最小,我们把变量限制在(0, 10)之间,使用scipy.optimize.fminbound():
In [13]: xmin_local = optimize.fminbound(f, 0, 10) In [14]: xmin_local Out[14]: 3.8374671194983834
注意:在高级章节部分数学优化:找到函数最小值中有关于寻找函数最小值更详细的讨论。
找到标量函数的根
为了寻找根,例如令f(x)=0的点,对以上的用来示例的函数f我们可以使用scipy.optimize.fsolve():
In [17]: root = optimize.fsolve(f, 1) # 我们的初始猜测是1 In [18]: root Out[18]: array([ 0.])
注意仅仅一个根被找到。检查f的图像在-2.5附近有第二个根。我们可以通过调整我们的初始猜测找到这一确切值:
In [19]: root = optimize.fsolve(f, -2.5) In [20]: root Out[20]: array([-2.47948183])
曲线拟合
假设我们有从被噪声污染的f中抽样到的数据:
In [21]: xdata = np.linspace(-10, 10, num=20) In [22]: ydata = f(xdata) + np.random.randn(xdata.size)
如果我们知道函数形式(当前情况是x^2 + sin(x)),但是不知道幅度。我们可以通过最小二乘拟合拟合来找到幅度。首先我们定义一个用来拟合的函数:
In [23]: def f2(x, a, b): ....: return a*x**2 + b*np.sin(x)
然后我们可以使用scipy.optimize.curve_fit()来找到a和b:
In [24]: guess = [2, 2] In [25]: params, params_covariance = optimize.curve_fit(f2, xdata, ydata, guess) In [26]: params Out[26]: array([ 1.00439471, 10.04911441])
现在我们找到了f的最小值和根并且对它使用了曲线拟合。我们将一切放在一个单独的图像中:
注意:Scipy>=0.11中提供所有最小化和根寻找算法的统一接口scipy.optimize.minimize(),scipy.optimize.minimize_scalar()和scipy.optimize.root()。它们允许通过method关键字方便地比较不同算法。
你可以在scipy.optimize中找到用来解决多维问题的相同功能的算法。
练习:曲线拟合温度数据
在阿拉斯加每个月的温度上下限,从一月开始,以摄氏单位给出。
| max: | 17, 19, 21, 28, 33, 38, 37, 37, 31, 23, 19, 18 |
|---|---|
| min: | -62, -59, -56, -46, -32, -18, -9, -13, -25, -46, -52, -58 |
- 绘制这些温度限
- 定义函数来描述最小和最大温度。提示:这个函数以一年为周期。提示:包括时间偏移。
- 对数据使用这个函数scipy.optimize.curve_fit()
- 绘制结果。是否拟合合理?如果不合理,为什么?
- 拟合精度的最大最小温度的时间偏移是否一样?
练习:2维最小化
source code
六峰值驼背函数:
有全局和多个局部最小。找到这个函数的全局最小。
提示:
- 变量应该限制在-2 < x < 2 , -1 < y < 1.
- 使用numpy.meshgrid()和plt.imshow来可视地搜寻区域。
- 使用scipy.optimize.fmin_bfgs()或其它多维极小化器。
这里有多少极小值?这些点上的函数值是多少?如果初始猜测是(x, y) = (0, 0)会发生什么?
参见总结练习非线性最小二乘拟合:在点抽取地形激光雷达数据上的应用,来看另一个,更高级的例子。
统计和随机数: scipy.stats
scipy.stats包括统计工具和随机过程的概率过程。各个随机过程的随机数生成器可以从numpy.random中找到。
直方图和概率密度函数
给定一个随机过程的观察值,它们的直方图是随机过程的pdf(概率密度函数)的估计器:
In [1]: import numpy as np In [2]: a = np.random.normal(size=1000) In [3]: bins = np.arange(-4, 5) In [4]: bins Out[4]: array([-4, -3, -2, -1, 0, 1, 2, 3, 4]) In [5]: histogram = np.histogram(a, bins=bins, normed=True)[0] In [6]: bins = 0.5*(bins[1:] + bins[:-1]) In [7]: bins Out[7]: array([-3.5, -2.5, -1.5, -0.5, 0.5, 1.5, 2.5, 3.5]) In [8]: from scipy import stats In [9]: b = stats.norm.pdf(bins) # norm是正态分布 In [10]: import matplotlib.pyplot as plt In [11]: plt.plot(bins, histogram) Out[11]: [] In [12]: plt.plot(bins, b) Out[12]: [ ] In [13]: plt.show()
如果我们知道随机过程属于给定的随机过程族,比如正态过程。我们可以对观测值进行最大似然拟合来估计基本分布参数。这里我们对观测值拟合一个正态过程:
In [14]: loc, std = stats.norm.fit(a) In [15]: loc Out[15]: 0.0052651057415999758 In [16]: std Out[16]: 0.97945439802779732
练习:概率分布
从参数为1的伽马分布生成1000个随机数,然后绘制这些样点的直方图。你能够在其上绘制pdf吗(应该匹配)?
另外:这些分布有些有用的方法。通过阅读它们的文档字符串或使用IPython的tab补全来探索它们。你能够通过对你的随机变量使用拟合找到形状参数1吗?
百分位
中位数是来观测值之下一半之上一半的值。
In [3]: np.median(a) Out[3]: -0.047679175711778043
它也被叫作50百分位点,因为有50%的观测值在它之下:
In [6]: stats.scoreatpercentile(a, 50) Out[6]: -0.047679175711778043
同样我们可以计算百分之九十百分点:
In [7]: stats.scoreatpercentile(a, 90) Out[7]: 1.2541592439997036
百分位是CDF的一个估计器(累积分布函数)。
统计检测
统计检测是决策指示。例如,我们有两个样本集,我们假设它们由高斯过程生成。我们可以使用T检验来决定是否两个样本值显著不同:
In [8]: a = np.random.normal(0, 1, size=100) In [9]: b = np.random.normal(1, 1, size=10) In [10]: stats.ttest_ind(a, b) Out[10]: (array(-2.4119199601156796), 0.01755485116571583)
输出结果由以下部分组成:
- T统计量:它是这么一种标志,与不同两个随机过程之间成比例并且幅度和差异的显著程度有关3。
- p值:两个过程相同的概率。如果接近1,这两个过程是几乎完全相同的。越靠近零,两个过程越可能有不同的均值。
插值:scipy.interpolate
scipy.interpolate对从实验数据拟合函数来求值没有测量值存在的点非常有用。这个模块基于来自netlib项目的FITPACK Fortran 子程序。
通过想象接近正弦函数的实验数据:
In [1]: measured_time = np.linspace(0, 1, 10) In [2]: noise = (np.random.random(10)*2 - 1) * 1e-1 In [3]: measures = np.sin(2 * np.pi * measured_time) + noise
scipy.interpolate.interp1d类会构建线性插值函数:
In [4]: from scipy.interpolate import interp1d In [5]: linear_interp = interp1d(measured_time, measures)
然后scipy.interpolate.linear_interp实例需要被用来求得感兴趣时间点的值:
In [6]: computed_time = np.linspace(0, 1, 50) In [7]: linear_results = linear_interp(computed_time)
三次插值也能通过提供可选关键字参数kind来选择:4
In [8]: cubic_interp = interp1d(measured_time, measures, kind='cubic') In [9]: cubic_results = cubic_interp(computed_time)
结果现在被集合在以下Matplotlib图像中:
source code
scipy.interpolate.interp2d与scipy.interpolate.interp1d相似,但是面向二维数组。注意,对interp族,计算时间必须在测量时间范围内。参见Maximum wind speed prediction at the Sprog? station的总结练习获得更高级的插值示例。
数值积分:scipy.integrateFusy,
最通用的积分程序是scipy.integrate.quad():
In [10]: from scipy.integrate import quad In [11]: res, err = quad(np.sin, 0, np.pi/2) In [12]: np.allclose(res, 1) Out[12]: True In [13]: np.allclose(err, 1 - res) Out[13]: True
其它可用的积分方案有fixed_quad,quadrature,romberg。
scipy.integrate也是用来积分常微分方程(ODE)的功能程序。特别是,scipy.integrate.odeint()是个使用LSODA(Livermore Solver for Ordinary Differential equations with Automatic method switching for stiff and non-stiff problems)通用积分器。参见ODEPACK Fortran library获得更多细节。
odeint解决这种形式的一阶ODE系统:
``dy/dt = rhs(y1, y2, .., t0,...)``
作为简介,让我们解决ODEdy/dt = -2y,区间t = 0..4,初始条件y(t=0) = 1。首先函数计算导数的位置需要被定义:
In [17]: def calc_derivative(ypos, time, counter_arr): ....: counter_arr += 1 ....: return -2 * ypos ....:
一个额外的参数counter_arr被添加,用来说明函数可能在单个时间步中被多次调用,直到解收敛。计数数组被定义成:
In [18]: counter = np.zeros((1,), dtype=np.uint16)
弹道将被计算:
In [19]: from scipy.integrate import odeint In [20]: time_vec = np.linspace(0, 4, 40) In [21]: yvec, info = odeint(calc_derivative, 1, time_vec, ....: args=(counter,), full_output=Tru)
因此导函数可以被调用40次(即时间步长数),
In [22]: counter Out[22]: array([129], dtype=uint16)
十个最初的时间点(time step)每个的累积迭代次数,可以这样获得:
In [23]: info['nfe'][:10] Out[23]: array([31, 35, 43, 49, 53, 57, 59, 63, 65, 69], dtype=int32)
注意到在第一个时间步的解需要更多的迭代。解yvec的轨道现在可以被画出:
source code
另一个使用scipy.integrate.odeint()的例子是一个阻尼弹簧-质点振荡器(二阶振荡)。附加在弹簧上质点的位置服从二阶常微分方程y'' + eps wo y' + wo^2 y= 0。其中wo^2 = k/m,k是弹簧常数,m是质量,eps=c/(2 m wo),c是阻尼系数。(译者:为什么不用latex……)对于这个例子,我们选择如下参数:
In [24]: mass = 0.5 # kg In [25]: kspring = 4 # N/m In [26]: cviscous = 0.4 # N s/m
所以系统将是阻尼振荡,因为:
In [27]: eps = cviscous / (2 * mass * np.sqrt(kspring/mass)) In [28]: eps < 1 Out[28]: True
对于scipy,integrate.odeint()求解器,二阶方程需要被转化成一个包含向量Y =y,y'的两个一阶方程的系统。定义nu = 2 eps * wo = c / m和om = wo^2 = k/m很方便:
In [29]: nu_coef = cviscous /mass In [30]: om_coef = kspring / mass
因此函数将计算速度和加速度通过:
In [31]: def calc_deri(yvec, time, nuc, omc): ....: return (yvec[1], -nuc * yvec[1] - omc * yvec[0]) ....: In [32]: time_vec = np.linspace(0, 10, 100) In [33]: yarr = odeint(calc_deri, (1, 0), time_vec, args=(nu_coef, om_coef))
最终的位置和速度在如下Matplotlib图像中显示:
source code
Scipy中不存在偏微分方程(PDE)求解器,一些解决PDE问题的Python软件包可以得到,像fipy和SfePy
(译者注:Python科学计算中洛伦兹吸引子微分方程的求解
信号处理:scipy.signal
In [34]: from scipy import signal
-
scipy.signal.detrend():移除信号的线性趋势:
In [35]: t = np.linspace(0, 5, 100) In [36]: x = t + np.random.normal(size=100) In [39]: import pylab as pl In [40]: pl.plot(t, x, linewidth=3) Out[40]: [] In [41]: pl.plot(t, signal.detrend(x), linewidth=3) Out[41]: [ ]
source code
-
scipy.signal.resample():使用FFT重采样n个点。
In [42]: t = np.linspace(0, 5, 100) In [43]: x = np.sin(t) In [44]: pl.plot(t, x, linewidth=3) Out[44]: [] In [45]: pl.plot(t[::2], signal.resample(x, 50), 'ko') Out[45]: [ ]
source code
-
Signal中有许多窗函数:scipy.signal.hamming(), scipy.signal.bartlett(), scipy.signal.blackman()…
-
Signal中有滤波器(中值滤波scipy.signal.medfilt(), 维纳滤波scipy.signal.wiener()),但是我们将在图像部分讨论。
图像处理:scipy.ndimage
scipy中致力于图像处理的子模块是scipy,ndimage。
In [49]: from scipy import ndimage
图像处理程序可以根据它们执行的操作类别来分类。
图像的几何变换
改变方向,分辨率……
In [50]: from scipy import misc In [51]: lena = misc.lena() In [52]: shifted_lena = ndimage.shift(lena, (50, 50)) In [53]: shifted_lena2 = ndimage.shift(lena, (50, 50), mode='nearest') In [54]: rotated_lena = ndimage.rotate(lena, 30) In [55]: cropped_lena = lena[50:-50, 50:-50] In [56]: zoomed_lena = ndimage.zoom(lena, 2) In [57]: zoomed_lena.shape Out[57]: (1024, 1024) In [63]: pl.subplot(321) Out[63]:In [64]: pl.imshow(lena, cmap=cm.gray) Out[64]: In [65]: pl.subplot(322) Out[65]: In [66]: #等等
图像滤镜
In [76]: from scipy import misc In [77]: lena = misc.lena() In [78]: import numpy as np In [79]: noisy_lena = np.copy(lena).astype(np.float) In [80]: noisy_lena += lena.std()*0.5*np.random.standard_normal(lena.shape) In [81]: blurred_lena = ndimage.gaussian_filter(noisy_lena, sigma=3) In [82]: median_lena = ndimage.median_filter(blurred_lena, size=5) In [83]: from scipy import signal In [84]: wiener_lena = signal.wiener(blurred_lena, (5,5))
许多其它scipy.ndimage.filters和scipy.signal中的滤镜可以被应用到图像中。
练习
比较不同滤镜图像的直方图
数学形态学
数学形态学是源于几何论的数学形态学。它具有结合结构的特点并变换几何结构。二值图(黑白图),特别能被用该理论转换:要转换的集合是邻近的非零值像素。这个理论也被拓展到灰度图中。
基本的数学形态操作使用一个结构元素(structuring element)来改变其它几何结构。
让我们首先生成一个结构元素:
In [129]: el = ndimage.generate_binary_structure(2, 1)
In [130]: el
Out[130]:
array([[False, True, False],
[ True, True, True],
[False, True, False]], dtype=bool)
In [131]: el.astype(np.int)
Out[131]:
array([[0, 1, 0],
[1, 1, 1],
[0, 1, 0]])
-
腐蚀
In [132]: a = np.zeros((7,7), dtype=int) In [133]: a[1:6, 2:5] = 1 In [134]: a Out[134]: array([[0, 0, 0, 0, 0, 0, 0], [0, 0, 1, 1, 1, 0, 0], [0, 0, 1, 1, 1, 0, 0], [0, 0, 1, 1, 1, 0, 0], [0, 0, 1, 1, 1, 0, 0], [0, 0, 1, 1, 1, 0, 0], [0, 0, 0, 0, 0, 0, 0]]) In [135]: ndimage.binary_erosion(a).astype(a.dtype) Out[135]: array([[0, 0, 0, 0, 0, 0, 0], [0, 0, 0, 0, 0, 0, 0], [0, 0, 0, 1, 0, 0, 0], [0, 0, 0, 1, 0, 0, 0], [0, 0, 0, 1, 0, 0, 0], [0, 0, 0, 0, 0, 0, 0], [0, 0, 0, 0, 0, 0, 0]]) In [xxx]:# 腐蚀移除对象使结构更小 In [136]: ndimage.binary_erosion(a, structure=np.ones((5,5))).astype(a.dtype) Out[136]: array([[0, 0, 0, 0, 0, 0, 0], [0, 0, 0, 0, 0, 0, 0], [0, 0, 0, 0, 0, 0, 0], [0, 0, 0, 0, 0, 0, 0], [0, 0, 0, 0, 0, 0, 0], [0, 0, 0, 0, 0, 0, 0], [0, 0, 0, 0, 0, 0, 0]]) -
膨胀
In [137]: a = np.zeros((5,5)) In [138]: a[2, 2] = 1 In [139]: a Out[139]: array([[ 0., 0., 0., 0., 0.], [ 0., 0., 0., 0., 0.], [ 0., 0., 1., 0., 0.], [ 0., 0., 0., 0., 0.], [ 0., 0., 0., 0., 0.]]) In [140]: ndimage.binary_dilation(a).astype(a.dtype) Out[140]: array([[ 0., 0., 0., 0., 0.], [ 0., 0., 1., 0., 0.], [ 0., 1., 1., 1., 0.], [ 0., 0., 1., 0., 0.], [ 0., 0., 0., 0., 0.]]) -
开操作(opening)
In [141]: a = np.zeros((5,5), dtype=np.int) In [142]: a[1:4, 1:4] = 1; a[4, 4] = 1 In [143]: a Out[143]: array([[0, 0, 0, 0, 0], [0, 1, 1, 1, 0], [0, 1, 1, 1, 0], [0, 1, 1, 1, 0], [0, 0, 0, 0, 1]]) In [144]: # 开操作可以移除小的对象 In [145]: ndimage.binary_opening(a, structure=np.ones((3,3))).astype(np.int)Out[145]: array([[0, 0, 0, 0, 0], [0, 1, 1, 1, 0], [0, 1, 1, 1, 0], [0, 1, 1, 1, 0], [0, 0, 0, 0, 0]]) In [146]: # 开操作也能平滑边角 In [147]: ndimage.binary_opening(a).astype(np.int) Out[147]: array([[0, 0, 0, 0, 0], [0, 0, 1, 0, 0], [0, 1, 1, 1, 0], [0, 0, 1, 0, 0], [0, 0, 0, 0, 0]]) -
闭操作(closing): ndimage.binary_closing
练习
查看开操作腐蚀,然后膨胀的量
一个开操作移除小的结构,而一个闭操作填补小的空洞。这种操作因此可被用来“清理”图像。
In [149]: a = np.zeros((50, 50)) In [150]: a[10:-10, 10:-10] = 1 In [151]: a += 0.25*np.random.standard_normal(a.shape) In [152]: mask = a>=0.5 In [153]: opened_mask = ndimage.binary_opening(mask) In [154]: closed_mask = ndimage.binary_closing(opened_mask)
练习
验证重构区域比初始区域更小。(如果闭操作在开操作之前则相反)
对灰度值图像,腐蚀(或者是膨胀)相当于用被集中在所关心像素点的结构元素所覆盖像素的最小(或最大)值替代当前像素点。
In [173]: a = np.zeros((7,7), dtype=np.int)
In [174]: a[1:6, 1:6] = 3
In [175]: a[4,4] = 2; a[2,3] = 1
In [176]: a
Out[176]:
array([[0, 0, 0, 0, 0, 0, 0],
[0, 3, 3, 3, 3, 3, 0],
[0, 3, 3, 1, 3, 3, 0],
[0, 3, 3, 3, 3, 3, 0],
[0, 3, 3, 3, 2, 3, 0],
[0, 3, 3, 3, 3, 3, 0],
[0, 0, 0, 0, 0, 0, 0]])
In [177]: ndimage.grey_erosion(a, size=(3,3))
Out[177]:
array([[0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0],
[0, 0, 1, 1, 1, 0, 0],
[0, 0, 1, 1, 1, 0, 0],
[0, 0, 3, 2, 2, 0, 0],
[0, 0, 0, 0, 0, 0, 0],
[0, 0, 0, 0, 0, 0, 0]])
图像测量
让我们首先生成一个漂亮的合成图像:
In [178]: x, y = np.indices((100, 100)) In [179]: sig = np.sin(2*np.pi*x/50.)*np.sin(2*np.pi*y/50.)*(1+x*y/50.**2)**2 In [180]: mask = sig > 1
现在我们查找图像中对象的各种信息:
In [181]: labels, nb = ndimage.label(mask)
In [182]: nb
Out[182]: 8
In [183]: areas = ndimage.sum(mask, labels, xrange(1, labels.max()+1))
In [184]: areas
Out[184]: array([ 190., 45., 424., 278., 459., 190., 549., 424.])
In [185]: maxima = ndimage.maximum(sig, labels, xrange(1, labels.max()+1))
In [186]: maxima
Out[186]:
array([ 1.80238238, 1.13527605, 5.51954079, 2.49611818,
6.71673619, 1.80238238, 16.76547217, 5.51954079])
In [187]: ndimage.find_objects(labels==4)
Out[187]: [(slice(30L, 48L, None), slice(30L, 48L, None))]
In [188]: sl = ndimage.find_objects(labels==4)
In [189]: import pylab as pl
In [190]: pl.imshow(sig[sl[0]])
Out[190]:
参见总结练习Image processing application: counting bubbles and unmolten grains获取更多高级示例。
总结练习
(译者:我不是很懂……)
总结练习主要使用Numpy,Scipy和Matplotlib。它们提供一些现实生活中用Python计算的示例。既然基本的Numpy和scipy使用已经被介绍了,欢迎有兴趣的用户尝试这些练习。
练习:
斯普罗站最大风速预测
非线性最小二乘拟合:地形雷达数据的点提取
图像处理应用:计数气泡和未融颗粒
建议的解:
图像处理练习解的示例:玻璃中的未融颗粒
Footnotes
-
BFGS算法?
-
Brute-Force方法?
-
……这解释,我真不懂。但t统计量是什么我知道……?
-
numpy 0.17可能会有bug?