参考书籍《Unity3D人工智能编程精粹》《Unity3D人工智能编程》
游戏AI的架构模型
- 运动层:AI的具体行为,比如移动
- 决策层:决定AI下一时间步该做什么
- 战略层:从集体层面对个体AI进行控制
除此之外,还要结合动画系统,物理引擎,感知系统等,共同组成人工智能
个体AI
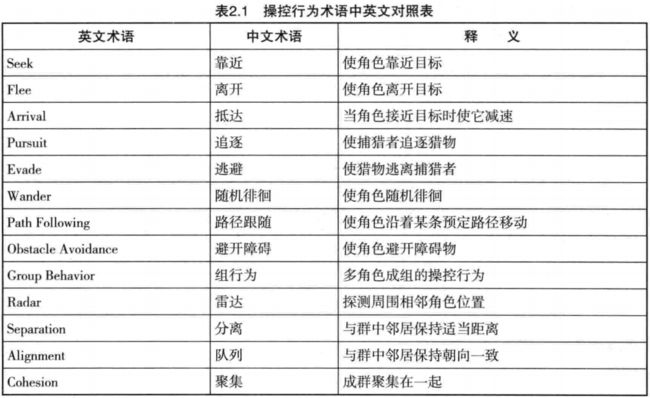
- Seek 是最常见的AI行为,最简单的实现是给AI添加一个修正力使之向目标移动
- Flee 和Seek相反,通常我们都要设置一个Distance范围判断结束行为。用Vector3.sqrMagnitude向量平方长度,计算会更快
- Arrival 到达目标减速至停止,可设置一个StopDistance,距离大于停止距离时给一个Force移向目标
- Pursuit 追逐会预测Target的未来位置,比如预测t时间内Target不会转向,AI将计算未来位置朝之移动。另外还可以用点乘计算夹角,判断双方是不是面对面
- Evade 逃避。与Pursuit反向
- Wander 随机徘徊。设置一个圆周半径,每帧给Target附加随机位移,比AI只按照预设好的路线移动更加真实
- FollowPath 路径跟随。设置radius路点半经,让AI在路径间切换更加真实
- CollisionAvoidance 避开障碍。向前射线检测障碍物的包围圈,产生一个排斥力。
集体AI
组行为
- 分离:避免局部拥挤
- 队列:朝向附近同伴的平均朝向
- 聚集:向附近同伴的平均位置移动
Radar 检测附近的AI角色(数学/Trigger)
Separation 分离。
搜索领域内的其他邻居,计算两者间的向量并单位化,得到排斥力方向,排斥力大小与距离成反比
Alignment 队列。将AI的朝向纠正为和邻居一致,平均朝向减去当前朝向就是操控朝向
Cohesion 聚集。
集体AI往往需要一个集体状态机, 负责判断团队整体状态和动作
各个角色则需要完成动作的多层状态机设置,比如这层行动路线,下层具体行为,下层角度速度细节
AI Director导演系统控制整局游戏流程
更多实例暂略……
A*寻路
A* (A-Star)算法是一种静态路网中
求解最短路最有效的直接搜索方法,也是许多其他问题的常用启发式算法。注意——是最有效的直接搜索算法,之后涌现了很多预处理算法(如ALT,CH,HL等等),在线查询效率是A*算法的数千甚至上万倍。
欧几里得/欧拉距离: 多维空间两点间的距离,即直线距离
曼哈顿距离:估计到目标格子之间的水平和垂直方格的数量和,即不走斜路
地图,目标估计,代价,节点
导航图:将地图用图表示
1、基于单元的导航图
将地图划分为多边形单元组成的规则网格。易于动态更新,但时间空间消耗都大
2、创建可见点导航图
先手工放置一些路径点,然后若路径点之间可视,就能以边连接。可以设置一些特殊点,适合简单的寻路
3、创建导航网格NavMesh
将可行走区域划分为凸多边形。可以是多种多边形的组合,让网格划分更加合理
采用“视线确定”方法,向前跳到视线最远途经点,对路径进行后处理,得到更平滑的路径
效率高,空间小
以基于单元的导航图为例,执行A*算法
g(n):起始节点到当前节点n的代价
h(n):当前节点n到目标节点的估计代价
f(n)=g(n)+h(n) 从初始状态经由状态n到目标状态的代价估计
open表:待考察的结点的优先级队列,代价从低到高(可以不排序,只找最小值)
closed表:已考查的结点列表
①
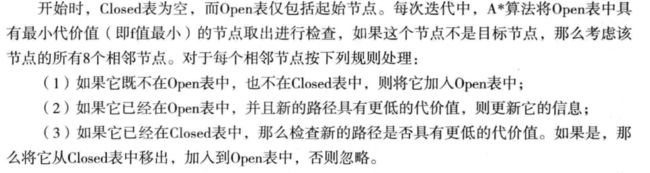

②
第一步:取起始结点,将其8个邻接点加入Open,并将各邻接点的父节点设置为起始节点,起始点加入Close
第二步:计算open表中结点的代价f=g+h,计算规则是:
g:取父节点g值,根据n点和父节点的连接方式计算。如果是直角连接g++,对角连接g+=1.414
h:采用欧几里得距离/ 曼哈顿距离[不考虑障碍物]
根据f大小来确定open表中下一个要被检查的节点
第三步:取f最小结点,检查8个邻接点,障碍物点无视。
计算各邻接点通过当前结点得到的新g值,计算规则同上
新结点加入open表
已经在open表的,若新g值比原值大,不需更新。若小于原值,则更新g,f,父节点,而不用更新h
已经在closed表的,按上图文字处理
第四步:对于具有相等的最小代价值f的结点,可任选一个计算。
……
循环直到终点
其他
1.对于已经计算的(存在于open或closed表中)节点,无需再次计算,因为选择那些节点只会绕远
2.障碍物节点加入closed表,对于被open或closed表包围的节点,也加入closed表中
和Dijkstra算法的区别:
Dijkstra是BFS,不会去预估到终点的距离,因此在有多个权值相等的路径时会搜索很多不必要的结点。而且没有考虑障碍物
A*是按照启发函数,向着目标搜。很适合寻路
Dijkstra会求出所有点的最短路径, 得到理论上的最优解,而A*则只会找需要计算的点。结果是A*更快,但是不一定是最优解
Unity寻路
- AI使用NavMeshAgent组件
- 如果要配合物理引擎使用,则AI需要有kinematic的刚体,表示刚体由nav控制
- 和Animator配合使用的话,最好不要用root motion
- 将地面勾选Navigation Static,再打开Navigation视图,点击bake即可看到蓝色可达区域
Navigation Area 可以设置object为不同Area,会用不同颜色表示
可以在NavMeshAgent中修改其可以行走的Area
Off Mesh Link 添加跳跃点(手动路径)
默认的NaveMesh Agent组件上面是勾选了Auto Traverse Off Mesh Link(自动通过OffMeshLink)选项的。这样的意思是人物只要到了OffMeshLink的开始点,就会自动的移动到OffMeshLink的结束点。
Navmesh Obstacle
enable时不可通行,false时可通行。此情况下物体不会暂停
寻路还有很多用法,这里就暂不详述了
AI感知事件
AI往往要感知视觉、听觉等信息来决策下一步的行为,其中又包括位置信息,对象属性信息,自身信息等
1、
轮询(主动查询信息)
轮询类似编程中的switch-case,是AI周期性地查询所需要的信息,轮询非常常见,容易维护,但有效信息率低,花费性能较多
轮询中心(没有必要每个AI都进行一遍查询,而是集中处理需要查询的信息)
2、
事件驱动(被动得知信息)
事件是一种高效的消息传递机制,由事件分发者主动通知每个感兴趣的AI,这样就使AI准时获得有效信息
可以做一个中心检测系统(事件管理器),记录每个AI感兴趣的事件,并通知他们,还方便了调试
3、
Trigger触发器
触发器其实和事件比较接近,相比之下,触发器是事件的本源,比如监听声音的声音触发器,检测观察物的视觉触发器,等待时间的时间触发器等等
Trigger 常用一个半径计算检测的范围,
Sensor 感知器则定义了枚举类型和变量,保存了事件管理器
视觉感知:圆锥形探测
听觉感知:衰减范围。而感知器也有对应的感知阈值
触觉感知:碰撞器
记忆感知:记忆List+Time留存时间
……
FSM有限状态机
finite-state machine 是表示有限个
状态 以及在这些状态之间的
转移和动作等行为的数学模型。
最简单的用enum+switch即可实现
在Unity中,我们可以用Animator或其他FSM框架实现可视化状态机
但是对于一些复杂的AI,用FSM图十分繁琐,效率低且容易出错,对一般的AI来说,FSM就足够了
BehaviorTree行为树
行为树是由行为节点组成的树状结构
对于FSM,每个节点表示一个状态,而对于BT,每个节点表示一个行为。
行为树层次清晰,易于模块化,封装性好,可重用,是一种效果理想的AI编辑器
在BT中,节点是有层次(Hierarchical)的,子节点由其父节点来控制。
每个节点的执行都有一个结果(成功Success,失败Failure或运行Running),该节点的执行结果都由其父节点来管理,从而决定接下来做什么,父节点的类型决定了不同的控制类型。
常见结点:Sequence,
Selector,Parallel,Decorators
AI实例
AI包括设计和实现两部分
AI设计
首先要根据需求,设计关卡中合适的AI,是个体还是集体,有什么特点,可行性,并制作相应的资源
AI的基本逻辑:感知-行动-反应-学习
AI的基本能力
AI的基本属性
设计逻辑流程图/状态图
设计AI使用技能,就好比调用一个结点
2D横版AI
个体行动:待更新
集体战术:夹击,车轮,埋伏
3D平面AI
常见的技能行为有:追寻,连击,远程攻击,固定线路攻击,绕路,反向攻击,跳起等等
关于Unity-AI的更多技术,我将另外写篇博文