STM32F767+STM32CubeMX I2C通信读写EEPROM数据(采用轮询、DMA、中断三种方式)
STM32F767+STM32CubeMX I2C通信读写EEPROM数据(采用轮询、DMA、中断三种方式)
摘要-前言
作为一名STM32的初学者,在学习过程中会遇到很多问题,解决过程中会看到很多博主发过的文章,每次都是零零总总的学习各个大牛的经验。但时间久了就会忘记其中的一些关键点,所以才有了把自己解决问题的过程记录下来的想法,日后回忆起也很方便。
前人们做过很多STM32 I2C通信的努力,但大多都是基于STM32F0、F1、F4这些系列的板子,而众所周知不同系列之间还是有不同的,这就导致初学者学习STM32时,会遇到很多困难。另外 I2C通信很多人采取的是软件模拟实现,对硬件并不看好。但是毕竟这么多年过去了,HAL库及CubeMX的出现,能够很大程度上解决I2C宕机的问题。所以本文除了讲解CubeMX I2C通信以外,也顺便做了实验来验证I2C的实际效果。
硬件设施:正点原子STM32F676阿波罗开发板
IDE:KEIL5
STM32CubeMX:5.4.0
STM32CubeMX Firmware Package Name and Version:STM32Cube FW_F7 V1.15.0
Keil STM32F767芯片包:Keil.STM32F7xx_DFP.2.12.0
EEPROM:24C02
I2C2-SCL:PH4
I2C2-SDA:PH5
轮询方式(普通方式)读写EEPROM(24C02)
配置RCC
 选择HSE的Crystal/Ceramic Resonator其余默认
选择HSE的Crystal/Ceramic Resonator其余默认
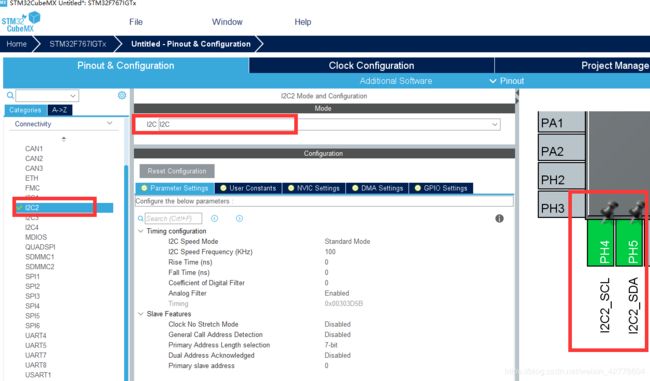
配置I2C2
这里需要注意一下,CubeMX默认的I2C2不是PH4和PH5,是PF0和PF1。如果直接点击左侧选项中的I2C2,就自动成了默认PF0和PF1。正点原子开发板资料中虽然写了24C02连接在I2C2上,但是粗心的我并没有注意引脚号,在配置工程时,选择了默认,这一个小小的问题,浪费了我两天时间。
配置时,在右侧的芯片上找到PH4与PH5,左键引脚,选择I2C2_SCL和I2C2-SDA,此时两个引脚会变成黄色。
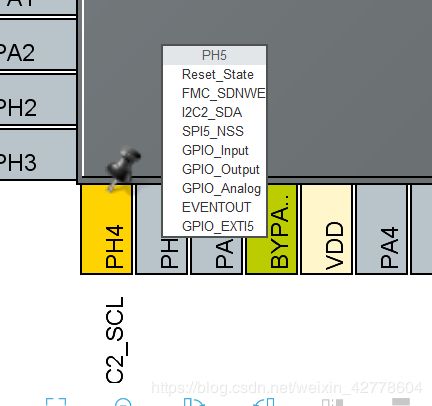
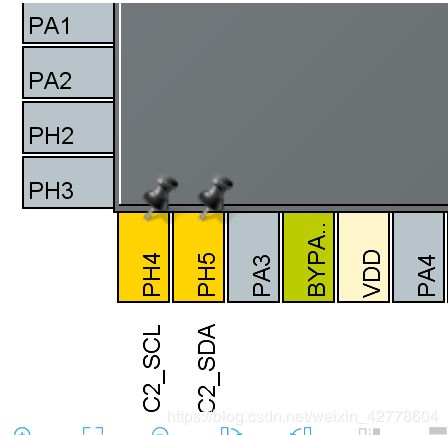
这个时候再去选中左侧的I2C2,就会定位到PH4和PH5了。
接下来再看下面的配置参数:
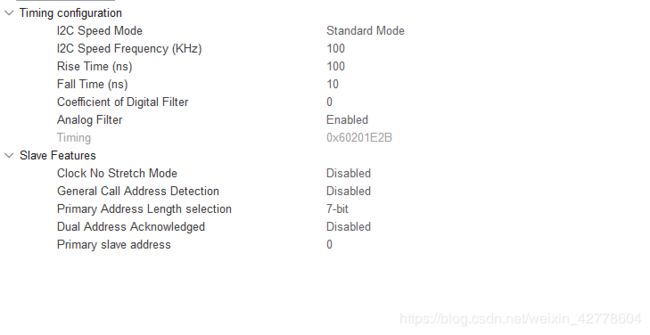
选择了标准模式,那么频率对应100KHZ。Rise Time、Fall Time、Coefficient of Digital Filter 实际上是要遵循一套非常复杂的时序计算方法的,也和对应的外设有关系,在设置前要阅读相关的外设资料此处暂时不展开。Timing由软件自动计算好,这也是CubeMX方便之处。
配置USART1
配置串口的目的,是为了能够把从EEPROM读出来的数据“打印”在串口调试助手上,方便检验。
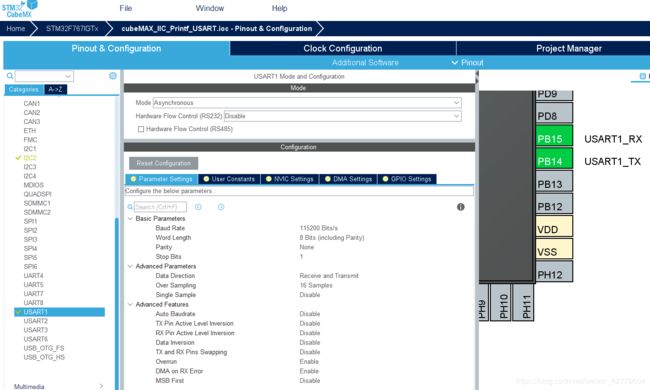 选择USART1,在选择Asynchronous,其余默认即可。
选择USART1,在选择Asynchronous,其余默认即可。
配置时钟树
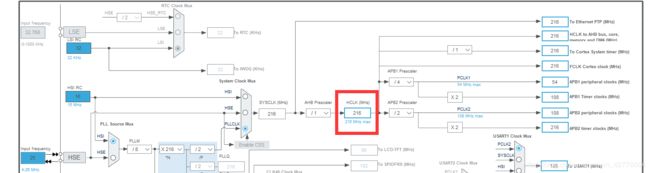 直接把红色地方拉满即可。
直接把红色地方拉满即可。
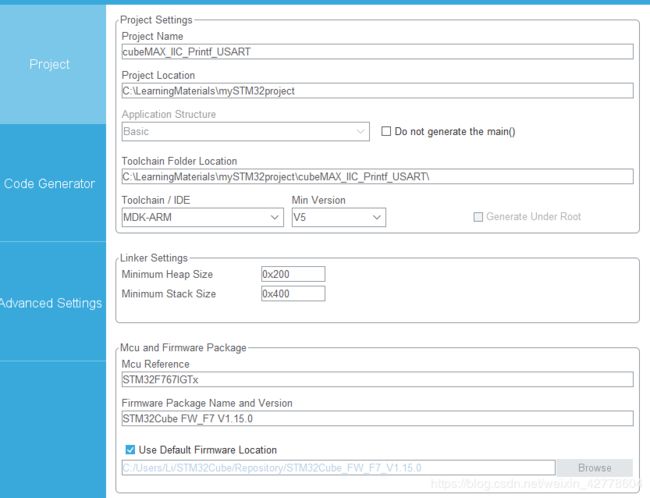
工程管理
从串口打印汉字、英文、数字等可读性信息
配置完后,打开工程,在main.c中添加如下代码,对prinf函数进行重定位。
#include
/* USER CODE BEGIN PFP */
#ifdef __GNUC__
#define PUTCHAR_PROTOTYPE int __io_putchar(int ch)
#else
#define PUTCHAR_PROTOTYPE int fputc(int ch, FILE *f)
#endif /* __GNUC__ */
PUTCHAR_PROTOTYPE
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0x0001);
return ch;
}
/* USER CODE END PFP */
勾选微库
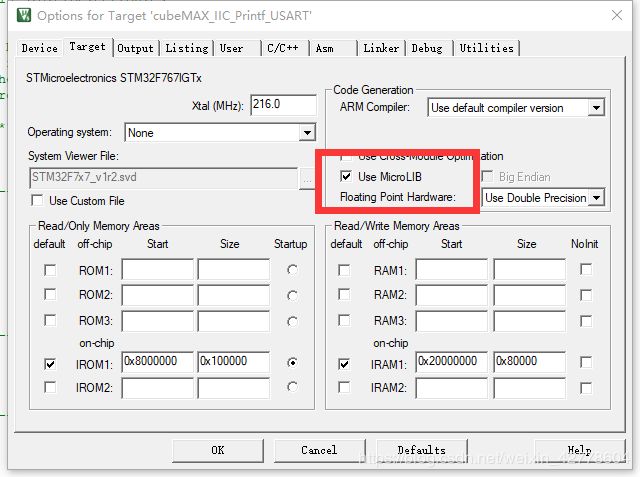 然后就可以开开心心用Printf函数了。
然后就可以开开心心用Printf函数了。
I2C轮询方式的代码
/* USER CODE BEGIN PD */
#define ADDR_24LCxx_Write 0xA0
#define ADDR_24LCxx_Read 0xA1
#define BufferSize 0X100
/* USER CODE END PD */
24C02的写地址是0XA0,读地址为0XA1,总存储空间为256字节。
/* USER CODE BEGIN PV */
uint8_t WriteBuffer[BufferSize], ReadBuffer[BufferSize];
uint16_t i,j;
uint16_t recv;//保存I2C读写函数的返回值,方便DEBUG
/* USER CODE END PV */
查阅24C02的资料可知,该EEPROM总存储量256字节,按照页来存储,每页8个字节。因此每次写入只可以写8个字节,写满的话总共要分32次执行。参考资料同时指出,每次写入需要等待5ms之后才能进行下次写入。因此下面的程序我分了32次执行,每次存储8字节。
使用函数HAL_I2C_Mem_Write进行写入操作,该函数在用户手册中定义如下:
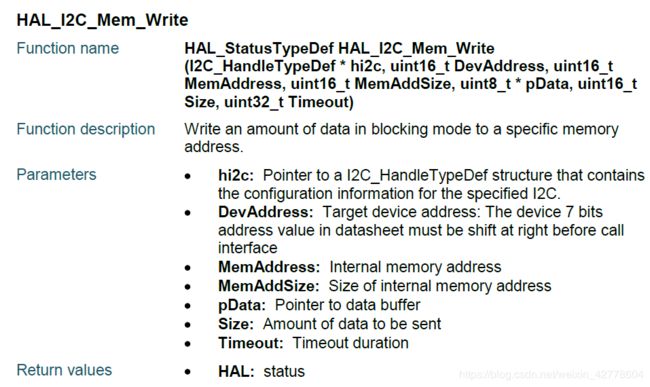 从描述中可以看出,这种传递方式是阻塞的,形象的说,CPU等在这里Timeout ms啥都不敢,就等写入或者读取数据,只有读写结束后程序才往下进行。这种方式令人很不舒服。尤其是在严格控制节拍的地方。
从描述中可以看出,这种传递方式是阻塞的,形象的说,CPU等在这里Timeout ms啥都不敢,就等写入或者读取数据,只有读写结束后程序才往下进行。这种方式令人很不舒服。尤其是在严格控制节拍的地方。
/* USER CODE BEGIN 2 */
printf("Write data in EEPROM\r\n");
for (i = 0; i < 256; i++)
WriteBuffer[i] = i;
for (j = 0; j < 32; j++)
{
if ((recv = HAL_I2C_Mem_Write(&hi2c2, ADDR_24LCxx_Write, 8 * j, I2C_MEMADD_SIZE_8BIT, WriteBuffer + 8 * j, 8)) == HAL_OK)
{
printf("\r\n EEPROM 24C02 Write Test OK \r\n");
HAL_Delay(5);
}
else
{
HAL_Delay(5);
printf("\r\n EEPROM 24C02 Write Test False \r\n");
printf("\r\n recv = %d \r\n",recv);
}
}
/* USER CODE END 2 */
在主函数中添加:使用HAL_I2C_Mem_Read函数进行一次性读取操作。参数意义和写函数一样。读取完后,打印出读到的结果。
if ((recv = HAL_I2C_Mem_Read(&hi2c2, ADDR_24LCxx_Read, 0, I2C_MEMADD_SIZE_8BIT, ReadBuffer, BufferSize)) == HAL_OK)
{
printf("This is Data in EEPROM!!\r\n");
for (i = 0; i < 256; i++)
printf("%d", ReadBuffer[i]);
printf("\r\nGOT Finished!!\r\n");
}
else
{
printf("Failed to get data\r\n");
printf("recv = %d !\r\n", recv);
}
I2C轮询方式的实验结果
下载到单片机中,连接好串口线,打开串口调试助手,选好端口等参数,打开串口,给单片机上电,助手中出现以下内容:
成功写入32次,然后读取到结果。
用DMA的方式,实现I2C通信
DMA方式实现I2C通信是非阻塞的,DMA控制器化身成为数据的搬运工,专门负责管理数据在内存外设之间传递。CPU把数据扔给DMA后,就撒手不管了,继续该干嘛干嘛。DMA则接盘数据,进行搬运工作。大大节约CPU的运行效率。
CubeMX配置I2C-DMA
在刚才的基础上,只需要修改两个地方:
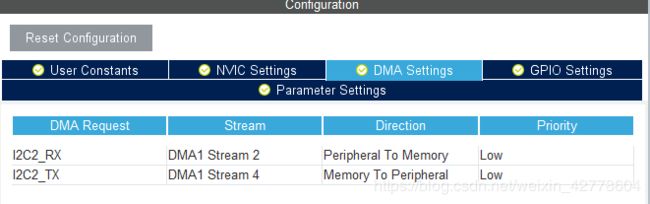 Add接受和发送的DMA Request,参数默认就行了。
Add接受和发送的DMA Request,参数默认就行了。
接下来就是关键的地方,一定要勾选I2C2 event interrupt,否则你只能进行一次不超过 256 Bytes 的 DMA,之后就得手动去清空标志位,再手动启动一次 DMA 发送。
参考这位大佬的原话:使用硬件 I2C + DMA 操作液晶屏 (STM32)
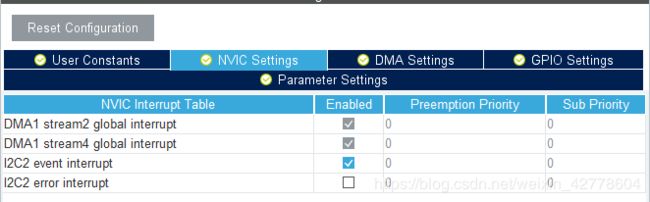
勾选 I2C2事件中断
代码修改-DMA方式实现I2C通信
重新生成代码,在新的代码中,只需要换一下函数。
写入操作:
(recv = HAL_I2C_Mem_Write_DMA(&hi2c2, ADDR_24LCxx_Write, 8 * j, I2C_MEMADD_SIZE_8BIT, WriteBuffer + 8 * j, 8)) == HAL_OK
读取操作:
(recv = HAL_I2C_Mem_Read_DMA(&hi2c2, ADDR_24LCxx_Read, 0, I2C_MEMADD_SIZE_8BIT, ReadBuffer, BufferSize)) == HAL_OK
HAL_I2C_Mem_Write_DMA函数和HAL_I2C_Mem_Read_DMA函数的参数含义和之前轮询方式的一致。只是少了Timeout这一项,因为CPU从此再也不需要等待了。
实验结果-DMA方式实现I2C通信
 成功写入32次,然后读取到EEPROM中的数据。
成功写入32次,然后读取到EEPROM中的数据。
用中断的方式,实现I2C通信
中断方式实现I2C通信也是非阻塞的,每次执行完一些特定事件之后,CPU会自动调取对应的中断回调函数,STM32的I2C定义的回调函数有:
void HAL_I2C_EV_IRQHandler (I2C_HandleTypeDef * hi2c);
void HAL_I2C_ER_IRQHandler (I2C_HandleTypeDef * hi2c);
void HAL_I2C_MasterTxCpltCallback (I2C_HandleTypeDef *hi2c);
void HAL_I2C_MasterRxCpltCallback (I2C_HandleTypeDef * hi2c);
void HAL_I2C_SlaveTxCpltCallback (I2C_HandleTypeDef * hi2c);
void HAL_I2C_SlaveRxCpltCallback (I2C_HandleTypeDef * hi2c);
void HAL_I2C_AddrCallback (I2C_HandleTypeDef * hi2c, uint8_t TransferDirection, uint16_t AddrMatchCode);
void HAL_I2C_ListenCpltCallback (I2C_HandleTypeDef * hi2c);
void HAL_I2C_MemTxCpltCallback (I2C_HandleTypeDef * hi2c);
void HAL_I2C_MemRxCpltCallback (I2C_HandleTypeDef * hi2c);
void HAL_I2C_ErrorCallback (I2C_HandleTypeDef * hi2c);
void HAL_I2C_AbortCpltCallback (I2C_HandleTypeDef * hi2c);
除了前两个函数已经被HAL库实现,其余的都为弱函数,用户可以根据自己的需求,重新定义声明这些函数。每一种回调函数的执行时间和条件都很清楚的说明在STM32F7的用户手册412页到415页的IO操作中。
这是STM32F7用户手册的下载地址
查阅P412 Polling mode IO MEM operation 和 Interrupt mode IO MEM operation可知,HAL_I2C_Mem_Write/Read_系列的函数,是对内存读写。执行HAL_I2C_Mem_Write/Read_IT函数后,HAL_I2C_MemTx/RxCpltCallback() 函数被调用。其实仔细读一下会发现,DMA实现方法也能使HAL_I2C_MemTx/RxCpltCallback() 函数被调用。
CubeMX配置I2C-IT
啥都不用改,沿用DMA的配置!!!!
代码修改-中断方式实现I2C通信
首先需要用中断的方式需要重新写回调函数。在程序前面添加函数声明:
/* USER CODE BEGIN PFP */
void HAL_I2C_MemTxCpltCallback(I2C_HandleTypeDef *hi2c);
void HAL_I2C_MemRxCpltCallback(I2C_HandleTypeDef *hi2c);
/* USER CODE END PFP */
为了能够证明程序执行了回调函数中的内容,在回调函数中计数,因此全局变量中增添两个变量:
uint16_t check_TX;
uint16_t check_RX;
后面需要重新定义回调函数:
/* USER CODE BEGIN 4 */
void HAL_I2C_MemTxCpltCallback(I2C_HandleTypeDef *hi2c)
{
check_TX++;
}
void HAL_I2C_MemRxCpltCallback(I2C_HandleTypeDef *hi2c)
{
check_RX++;
}
/* USER CODE END 4 */
备注:本来打算是要在回调函数中使用printf函数打印出信息的,但是失败了,我认为可能是因为printf函数是一种很费时占资源的操作,在CPU高速调用回调函数时,这种费时操作并不能成功。但是对变量的运算时很简便的,轻松可以完成。所以我采用了计数,而非打印出信息。
最后读写完毕后,在主程序内打印出check_TX和check_RX:
至于读写函数,可以依旧沿用DMA方式,也可以改成中断形式HAL_I2C_Mem_Write/Read_IT,并不影响结果,因为用户手册已经表示,两种方式都能触发HAL_I2C_MemTxCpltCallback和HAL_I2C_MemRxCpltCallback。
if ((recv = HAL_I2C_Mem_Read_IT(&hi2c2, ADDR_24LCxx_Read, 0, I2C_MEMADD_SIZE_8BIT, ReadBuffer, BufferSize)) == HAL_OK)
{
printf("This is Data in EEPROM!!\r\n");
for (i = 0; i < 256; i++)
printf("%d", ReadBuffer[i]);
printf("\r\nGOT Finished!!\r\n");
printf("\r\ncheck_TX = %d\r\n",check_TX);
printf("\r\ncheck_RX = %d\r\n",check_RX);
}
else
{
printf("Failed to get data\r\n");
printf("recv = %d !\r\n", recv);
}
实验结果-中断方式实现I2C通信,打印进入回调函数中的次数
实验结果如下:
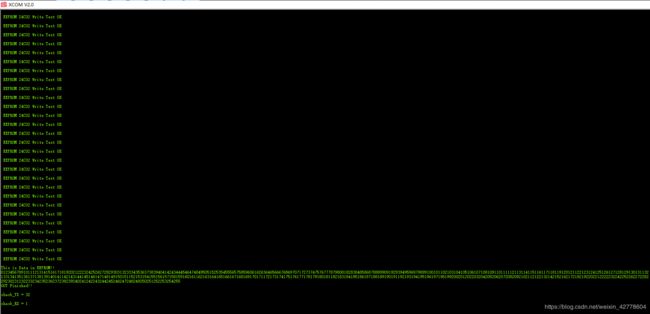 可以看出写入了32次,读取了1次。
可以看出写入了32次,读取了1次。
硬件I2C的极限测试
在网上看到很多人都在说意法半导体为了避免飞利浦的专利问题,STM32系列芯片的硬件I2C通信存在BUG,但这么多年过去了,STM32的HAL库出好几代了,CubeMX更是方便至极,我觉得这么牛皮的公司,应该能解决这些问题吧。所以最后,为了验证I2C的可靠性,做一个极限测试。继续沿用之前的代码,稍作修改,采用DMA的方式进行测试。I2C配置上,直接把速度拉满400KHZ(24C02最大支持到400KHZ)。在程序中,先写入数据。然后疯狂无限读取。看看会不会宕机。
代码修改-每ms读取一次I2C
因为需要1ms读取一次,现在stm32f7xx_it.c文件中声明一个变量Flag_1msChanged;
/* USER CODE BEGIN PV */
extern unsigned char Flag_1msChanged;
/* USER CODE END PV */
在void SysTick_Handler(void)函数中加一句:
void SysTick_Handler(void)
{
/* USER CODE BEGIN SysTick_IRQn 0 */
/* USER CODE END SysTick_IRQn 0 */
HAL_IncTick();
/* USER CODE BEGIN SysTick_IRQn 1 */
Flag_1msChanged = 1;//每1ms实现一次标志位改变
/* USER CODE END SysTick_IRQn 1 */
}
回到main.c文件,加入如下变量:
/* USER CODE BEGIN PV */
unsigned char Flag_1msChanged = 0;
unsigned char Flag_10msChanged = 0;
unsigned char Flag_100msChanged = 0;
unsigned char Flag_500msChanged = 0;
unsigned char Flag_1000msChanged = 0;
unsigned char Counter_1ms = 0;
unsigned char Counter_10ms = 0;
unsigned char Counter_100ms = 0;
unsigned char Counter_1000ms = 0;
unsigned char Counter_200ms = 0;
/* USER CODE END PV */
while(1)函数加入以下逻辑,就能够实现精确地定时操作。
while (1)
{
if (Flag_1msChanged == 1)
{
Flag_1msChanged = 0;
Counter_1ms++;
if (Counter_1ms >= 10)
{
Counter_1ms = 0;
Flag_10msChanged = 1;
Counter_10ms++;
if (Counter_10ms >= 10)
{
Counter_10ms = 0;
Flag_100msChanged = 1;
Counter_100ms++;
if (Counter_100ms >= (10 * 1))//1s
{
Counter_100ms = 0;
}
在1ms的区块内增加如下代码:
while (1)
{
if (Flag_1msChanged == 1)
{
Flag_1msChanged = 0;
Counter_1ms++;
//每1ms执行一次的代码
if ((recv = HAL_I2C_Mem_Read_IT(&hi2c2, ADDR_24LCxx_Read, 0, I2C_MEMADD_SIZE_8BIT, ReadBuffer, BufferSize))
== HAL_OK)
{
printf("\r\nS\r\n");
}
else
{
printf("F\r\n");
printf("recv = %d !\r\n", recv);
}
//成功读取打印S 失败打印F并返回错误代码
if (Counter_1ms >= 10)
{
Counter_1ms = 0;
Flag_10msChanged = 1;
Counter_10ms++;
if (Counter_10ms >= 10)
{
Counter_10ms = 0;
Flag_100msChanged = 1;
Counter_100ms++;
if (Counter_100ms >= (10 * 1))//1s
{
Counter_100ms = 0;
}
}
}
实验结果
连续跑了一个多小时没有任何问题,没出现前人发现的宕机之类的问题,也可能是测试代码太过于简单。但我个人认为,稳定性没什么问题的。可以放心使用。下图为测试结果,可以看到已经接收到了两百万余次成功。(确实跑了一个多小时,但是次数没够 这里没有去深究 只是怀疑printf是一种耗时操作,每次循环printf可能都大于1ms)
总结
这些内容也只是STM32的I2C通信的皮毛,在整理资料的过程中仍然发现还有很多未知。但是个人觉得学习东西浅尝辄止就足够了,基本能够应付简单的I2C通信问题。在实际的项目中,若发现当前的知识并不足以解决问题,那么以问题为导向去学习,效率会更高。