最大流问题之FF算法与EK算法
目录
问题描述:
EK算法:
算法描述:
伪代码:
例子:
控制台对应输出为:
关键定理证明:
最大流最小割定理:
1推2:
2推3:
3推1:
时间复杂度分析
分析
关键边定义:
时间复杂度计算:
FF算法:
FF算法介绍
FF算法缺陷分析:
问题描述:
G=(V,E)是一个有向图,其中每条边(u,v)有一个非负的容量值c(u,v),而且如果E中包含一条边(u,v),那么图中就不存在它的反向边。在流网络中有两个特殊的结点,源结点s和汇点t,源结点s只会流出不会流进,汇点只会流进不会流出,我们要求的就是从源结点流到汇结点的路径的值之和的最大值
EK算法:
算法描述:
每次从残留网络中找出一条从源结点到汇结点的最短路径,流选为路径中的残存容量,依据流更新残存网络(将每条边的残存容量改为当前容量减去流的大小,并添加对应的反向边,边的容量为流的大小)
重复选最短路径,更新残存网络,直到没有最短路径为止
此时的流累加和即为最大流
由于每次要找的是最短路径,所以需要用BFS找路径
伪代码:
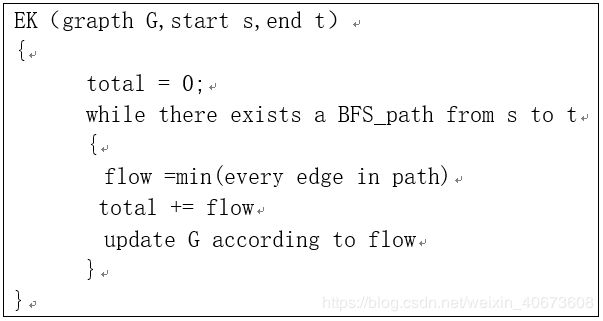
例子:
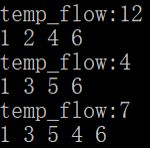
初始图:
第一次路径1->2->4->6,流大小:12

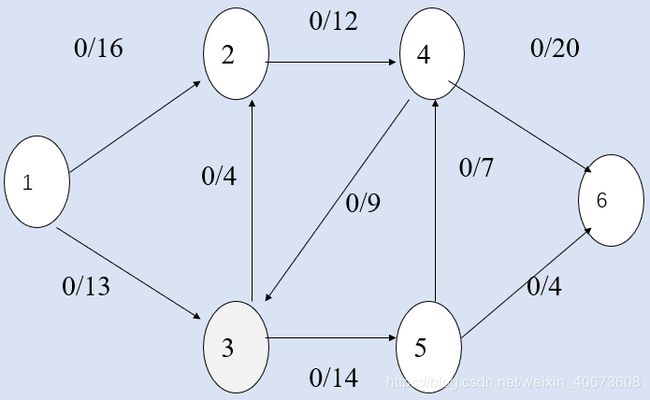
更新后图为:
第二次路径为1->3->5->6,流大小:4

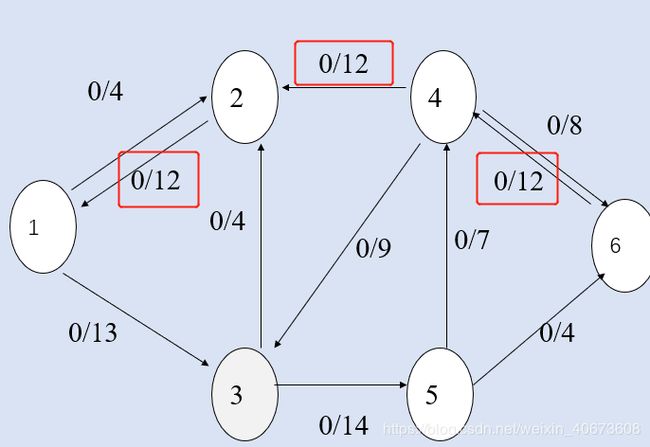
更新后图为:

第三次路径为1->3->5->4->6,流大小:7
更新后图为:

此时,再也找不到最短路径,算法结束,则最大流为:12+4+7=23
控制台对应输出为:
关键定理证明:
最大流最小割定理:
| 下面条件等价 1、f是G的一个最大流 2、残存网络不包括任何增广路径 3、|f|=c(S,T),其中(S,T)是流网络的某个切割 |
1推2:
假定f是G的一个最大流,但残存网络中仍包含有一条增广路径,那么对流f增加流量后,所得的值是严格大于f的值的,这与f是G的一个最大流矛盾
2推3:
假设流网络G不包含任何增广路径,现在定义S为G中存在一条从s到v的路径的所有v的集合,定义T为V-S,则划分(S,T)是流网络G的一个切割。
对S中的任意一个结点u,T中的任意一个结点v
如果(u,v)属于E,则必有f(u,v)=c(u,v)
如果(v,u)属于E,则必有f(v,u)=0
如果(u,v)和(v,u)都不属于E,则f(u,v)= f(v,u)=0
因此
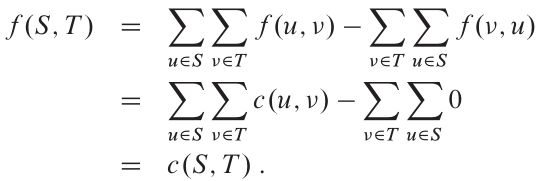
所以|f| = f(S,T)= c(S,T),得证
3推1:
对于所有切割(S,T),|f|≤c(S,T)
因此,当|f| = c(S,T)时,f就是一个最大流
时间复杂度分析
分析
对于一个流网络,我们要分析EK算法的复杂度,实际就是要分析调用bfs的次数,但是bfs的次数是很难分析的,所以需要做一点转换,将对bfs次数的分析转换为其它和它等价的实体量且稍微简单一点的分析
在实际分析中,我们发现关键边的个数和bfs的次数是等价的,所以要分析bfs次数,不妨就分析关键边的个数
关键边定义:
边(u,v)的残存容量为最短路径的残存容量,则称为为关键边
任一增广路径都至少存在一条关键边
时间复杂度计算:
边(u,v)成为关键边到下一次成为关键边,从原结点到u的距离至少增加2个单位
②由于从源结点s到结点u的中间结点不可能包括s、u或t,所以一直到u成为不可到达结点前,距离最长为v-2
由①②可得边(u,v)成为关键边的次数最多为(V-2)/2,取V/2
由于一共有E条边,所以EK算法中关键边总数为O(VE)
总时间 = BFS时间 * BFS次数
由于每次BFS时间为O(E),需要O(VE)次BFS,所以总时间为O(VE²)
FF算法:
FF算法介绍
FF算法和EK算法很相似,唯一不同的地方就是FF算法每次找的不是最短增广路径,它找的路径是随机的
FF算法缺陷分析:
由于FF算法每次找的增广路径不是最短路径,所以FF算法存在这样一个缺陷:它会使一条边成为关建边的最大次数从原来的V/2上升到K/2(K为所有边中权值最大的边的权值)
举下面一个例子
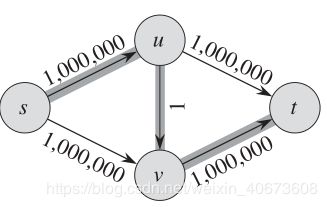
图3、FF算法样例图
按照EK算法,边(u,v)和(v,u)成为关键边的最大次数应该是4/2-1 = 1,所以所需要的bfs次数为1+1 = 2次
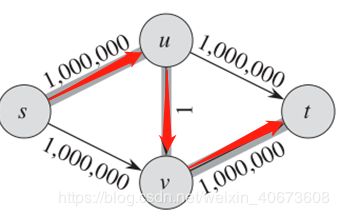
图4、FF算法过程图

图5、FF算法过程图
在FF算法中,它将以图4和图5的方式反复流动500000次
边(u,v)和(v,u)成为关键边的最大次数是1000000/2=500000,所以所需要的bfs次数为500000+500000=1000000次,由于调用bfs的效率过低,所以会导致FF算法比EK算法慢
代码:×