docker学习总结第四篇-认识容器
在前面的三次分享中,我分别从 Linux Namespace 的隔离能力、Linux Cgroups 的限制能力,以及基于 rootfs 的文件系统三个角度,为你剖析了一个 Linux 容器的核心实现原理。
备注:之所以要强调 Linux 容器,是因为比如 Docker on Mac,以及 Windows Docker(Hyper-V 实现),实际上是基于虚拟化技术实现的,跟我们这个专栏着重介绍的 Linux 容器完全不同。
而在今天的分享中,我会通过一个实际案例,对“白话容器基础”系列的所有内容做一次深入的总结和扩展。希望通过这次的讲解,能够让你更透彻地理解 Docker 容器的本质。
在开始实践之前,你需要准备一台 Linux 机器,并安装 Docker。这个流程我就不再赘述了。
这一次,我要用 Docker 部署一个用 Python 编写的 Web 应用。这个应用的代码部分(app.py)非常简单:
from flask import Flask
import socket
import os
app = Flask(__name__)
@app.route('/')
def hello():
html = "Hello {name}!
" \
"Hostname: {hostname}
"
return html.format(name=os.getenv("NAME", "world"), hostname=socket.gethostname())
if __name__ == "__main__":
app.run(host='0.0.0.0', port=80)
在这段代码中,我使用 Flask 框架启动了一个 Web 服务器,而它唯一的功能是:如果当前环境中有“NAME”这个环境变量,就把它打印在“Hello”后,否则就打印“Hello world”,最后再打印出当前环境的 hostname。
这个应用的依赖,则被定义在了同目录下的 requirements.txt 文件里,内容如下所示:
$ cat requirements.txt
Flask
而将这样一个应用容器化的第一步,是制作容器镜像。
不过,相较于我之前介绍的制作 rootfs 的过程,Docker 为你提供了一种更便捷的方式,叫作 Dockerfile,如下所示。
#使用官方提供的 Python 开发镜像作为基础镜像
FROM python:2.7-slim
#将工作目录切换为 /app
WORKDIR /app
#将当前目录下的所有内容复制到 /app 下
ADD . /app
#使用 pip 命令安装这个应用所需要的依赖
RUN pip install --trusted-host pypi.python.org -r requirements.txt
#允许外界访问容器的 80 端口
EXPOSE 80
#设置环境变量
ENV NAME World
#设置容器进程为:python app.py,即:这个 Python 应用的启动命令
CMD ["python", "app.py"]
通过这个文件的内容,你可以看到Dockerfile 的设计思想,是使用一些标准的原语(即大写高亮的词语),描述我们所要构建的 Docker 镜像。并且这些原语,都是按顺序处理的。
比如 FROM 原语,指定了“python:2.7-slim”这个官方维护的基础镜像,从而免去了安装 Python 等语言环境的操作。否则,这一段我们就得这么写了:
FROM ubuntu:latest
RUN apt-get update -yRUN apt-get install -y python-pip python-dev build-essential
...
其中,RUN 原语就是在容器里执行 shell 命令的意思。
而 WORKDIR,意思是在这一句之后,Dockerfile 后面的操作都以这一句指定的 /app 目录作为当前目录。
所以,到了最后的 CMD,意思是 Dockerfile 指定 python app.py 为这个容器的进程。这里,app.py 的实际路径是 /app/app.py。所以,CMD [“python”, “app.py”] 等价于 “docker run python app.py”。
另外,在使用 Dockerfile 时,你可能还会看到一个叫作 ENTRYPOINT 的原语。实际上,它和 CMD 都是 Docker 容器进程启动所必需的参数,完整执行格式是:“ENTRYPOINT CMD”。
但是,默认情况下,Docker 会为你提供一个隐含的 ENTRYPOINT,即:/bin/sh -c。所以,在不指定 ENTRYPOINT 时,比如在我们这个例子里,实际上运行在容器里的完整进程是:/bin/sh -c “python app.py”,即 CMD 的内容就是 ENTRYPOINT 的参数。
备注:基于以上原因,我们后面会统一称 Docker 容器的启动进程为 ENTRYPOINT,而不是 CMD。
需要注意的是,Dockerfile 里的原语并不都是指对容器内部的操作。就比如 ADD,它指的是把当前目录(即 Dockerfile 所在的目录)里的文件,复制到指定容器内的目录当中。
读懂这个 Dockerfile 之后,我再把上述内容,保存到当前目录里一个名叫“Dockerfile”的文件中:
$ ls
Dockerfile app.py requirements.txt
接下来,我就可以让 Docker 制作这个镜像了,在当前目录执行:
$ docker build -t helloworld .
其中,-t 的作用是给这个镜像加一个 Tag,即:起一个好听的名字。docker build 会自动加载当前目录下的 Dockerfile 文件,然后按照顺序,执行文件中的原语。而这个过程,实际上可以等同于 Docker 使用基础镜像启动了一个容器,然后在容器中依次执行 Dockerfile 中的原语。
需要注意的是,Dockerfile 中的每个原语执行后,都会生成一个对应的镜像层。即使原语本身并没有明显地修改文件的操作(比如,ENV 原语),它对应的层也会存在。只不过在外界看来,这个层是空的。
docker build 操作完成后,我可以通过 docker images 命令查看结果:
$ docker image ls
REPOSITORY TAG IMAGE ID
helloworld latest 653287cdf998
通过这个镜像 ID,你就可以使用在《理解容器》中讲过的方法,查看这些新增的层在 AuFS 路径下对应的文件和目录了。
接下来,我使用这个镜像,通过 docker run 命令启动容器:
$ docker run -p 4000:80 helloworld
在这一句命令中,镜像名 helloworld 后面,我什么都不用写,因为在 Dockerfile 中已经指定了 CMD。否则,我就得把进程的启动命令加在后面:
$ docker run -p 4000:80 helloworld python app.py
容器启动之后,我可以使用 docker ps 命令看到:
$ docker ps
CONTAINER ID IMAGE COMMAND CREATED
4ddf4638572d helloworld "python app.py" 10 seconds ago
同时,我已经通过 -p 4000:80 告诉了 Docker,请把容器内的 80 端口映射在宿主机的 4000 端口上。
这样做的目的是,只要访问宿主机的 4000 端口,我就可以看到容器里应用返回的结果:
$ curl http://localhost:4000
Hello World!
Hostname: 4ddf4638572d
否则,我就得先用 docker inspect 命令查看容器的 IP 地址,然后访问“http://< 容器 IP 地址 >:80”才可以看到容器内应用的返回。
至此,我已经使用容器完成了一个应用的开发与测试,如果现在想要把这个容器的镜像上传到 DockerHub 上分享给更多的人,我要怎么做呢?
为了能够上传镜像,我首先需要注册一个 Docker Hub 账号,然后使用 docker login 命令登录。
接下来,我要用 docker tag 命令给容器镜像起一个完整的名字:
$ docker tag helloworld wilson/helloworld:v1
注意:你自己做实验时,请将 “wilson” 替换成你自己的 Docker Hub 账户名称,比如 zhangsan/helloworld:v1
其中,wilson是我在 Docker Hub 上的用户名,它的“学名”叫镜像仓库(Repository);“/”后面的 helloworld 是这个镜像的名字,而“v1”则是我给这个镜像分配的版本号。
然后,我执行 docker push:
$ docker push wilson/helloworld:v1
这样,我就可以把这个镜像上传到 Docker Hub 上了。
此外,我还可以使用 docker commit 指令,把一个正在运行的容器,直接提交为一个镜像。一般来说,需要这么操作原因是:这个容器运行起来后,我又在里面做了一些操作,并且要把操作结果保存到镜像里,比如:
$ docker exec -it 4ddf4638572d /bin/sh
# 在容器内部新建了一个文件
root@4ddf4638572d:/app# touch test.txt
root@4ddf4638572d:/app# exit
# 将这个新建的文件提交到镜像中保存
$ docker commit 4ddf4638572d geektime/helloworld:v2
这里,我使用了 docker exec 命令进入到了容器当中。在了解了 Linux Namespace 的隔离机制后,你应该会很自然地想到一个问题:docker exec 是怎么做到进入容器里的呢?
实际上,Linux Namespace 创建的隔离空间虽然看不见摸不着,但一个进程的 Namespace 信息在宿主机上是确确实实存在的,并且是以一个文件的方式存在。
比如,通过如下指令,你可以看到当前正在运行的 Docker 容器的进程号(PID)是 25686:
$ docker inspect --format '{{ .State.Pid }}' 4ddf4638572d
25686
这时,你可以通过查看宿主机的 proc 文件,看到这个 25686 进程的所有 Namespace 对应的文件:
$ ls -l /proc/25686/ns
total 0
lrwxrwxrwx 1 root root 0 Aug 13 14:05 cgroup -> cgroup:[4026531835]
lrwxrwxrwx 1 root root 0 Aug 13 14:05 ipc -> ipc:[4026532278]
lrwxrwxrwx 1 root root 0 Aug 13 14:05 mnt -> mnt:[4026532276]
lrwxrwxrwx 1 root root 0 Aug 13 14:05 net -> net:[4026532281]
lrwxrwxrwx 1 root root 0 Aug 13 14:05 pid -> pid:[4026532279]
lrwxrwxrwx 1 root root 0 Aug 13 14:05 pid_for_children -> pid:[4026532279]
lrwxrwxrwx 1 root root 0 Aug 13 14:05 user -> user:[4026531837]
lrwxrwxrwx 1 root root 0 Aug 13 14:05 uts -> uts:[4026532277]
可以看到,一个进程的每种 Linux Namespace,都在它对应的 /proc/[进程号]/ns 下有一个对应的虚拟文件,并且链接到一个真实的 Namespace 文件上。
有了这样一个可以“hold 住”所有 Linux Namespace 的文件,我们就可以对 Namespace 做一些很有意义事情了,比如:加入到一个已经存在的 Namespace 当中。
这也就意味着:一个进程,可以选择加入到某个进程已有的 Namespace 当中,从而达到“进入”这个进程所在容器的目的,这正是 docker exec 的实现原理。
而这个操作所依赖的,乃是一个名叫 setns() 的 Linux 系统调用。它的调用方法,我可以用如下一段小程序为你说明:
#define _GNU_SOURCE
#include
#include
#include
#include
#include
#define errExit(msg) do { perror(msg); exit(EXIT_FAILURE);} while (0)
int main(int argc, char *argv[]) {
int fd;
fd = open(argv[1], O_RDONLY);
if (setns(fd, 0) == -1) {
errExit("setns");
}
execvp(argv[2], &argv[2]);
errExit("execvp");
}
这段代码功能非常简单:它一共接收两个参数,第一个参数是 argv[1],即当前进程要加入的 Namespace 文件的路径,比如 /proc/25686/ns/net;而第二个参数,则是你要在这个 Namespace 里运行的进程,比如 /bin/bash。
这段代码的的核心操作,则是通过 open() 系统调用打开了指定的 Namespace 文件,并把这个文件的描述符 fd 交给 setns() 使用。在 setns() 执行后,当前进程就加入了这个文件对应的 Linux Namespace 当中了。
现在,你可以编译执行一下这个程序,加入到容器进程(PID=25686)的 Network Namespace 中:
$ gcc -o set_ns set_ns.c
$ ./set_ns /proc/25686/ns/net /bin/bash
$ ifconfig
eth0 Link encap:Ethernet HWaddr 02:42:ac:11:00:02
inet addr:172.17.0.2 Bcast:0.0.0.0 Mask:255.255.0.0
inet6 addr: fe80::42:acff:fe11:2/64 Scope:Link
UP BROADCAST RUNNING MULTICAST MTU:1500 Metric:1
RX packets:12 errors:0 dropped:0 overruns:0 frame:0
TX packets:10 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:0
RX bytes:976 (976.0 B) TX bytes:796 (796.0 B)
lo Link encap:Local Loopback
inet addr:127.0.0.1 Mask:255.0.0.0
inet6 addr: ::1/128 Scope:Host
UP LOOPBACK RUNNING MTU:65536 Metric:1
RX packets:0 errors:0 dropped:0 overruns:0 frame:0
TX packets:0 errors:0 dropped:0 overruns:0 carrier:0
collisions:0 txqueuelen:1000
RX bytes:0 (0.0 B) TX bytes:0 (0.0 B)
正如上所示,当我们执行 ifconfig 命令查看网络设备时,我会发现能看到的网卡“变少”了:只有两个。而我的宿主机则至少有四个网卡。这是怎么回事呢?
实际上,在 setns() 之后我看到的这两个网卡,正是我在前面启动的 Docker 容器里的网卡。也就是说,我新创建的这个 /bin/bash 进程,由于加入了该容器进程(PID=25686)的 Network Namepace,它看到的网络设备与这个容器里是一样的,即:/bin/bash 进程的网络设备视图,也被修改了。
而一旦一个进程加入到了另一个 Namespace 当中,在宿主机的 Namespace 文件上,也会有所体现。
在宿主机上,你可以用 ps 指令找到这个 set_ns 程序执行的 /bin/bash 进程,其真实的 PID 是 28499:
# 在宿主机上
ps aux | grep /bin/bash
root 28499 0.0 0.0 19944 3612 pts/0 S 14:15 0:00 /bin/bash
这时,如果按照前面介绍过的方法,查看一下这个 PID=28499 的进程的 Namespace,你就会发现这样一个事实:
$ ls -l /proc/28499/ns/net
lrwxrwxrwx 1 root root 0 Aug 13 14:18 /proc/28499/ns/net -> net:[4026532281]
$ ls -l /proc/25686/ns/net
lrwxrwxrwx 1 root root 0 Aug 13 14:05 /proc/25686/ns/net -> net:[4026532281]
在 /proc/[PID]/ns/net 目录下,这个 PID=28499 进程,与我们前面的 Docker 容器进程(PID=25686)指向的 Network Namespace 文件完全一样。这说明这两个进程,共享了这个名叫 net:[4026532281] 的 Network Namespace。
此外,Docker 还专门提供了一个参数,可以让你启动一个容器并“加入”到另一个容器的 Network Namespace 里,这个参数就是 -net,比如:
$ docker run -it --net container:4ddf4638572d busybox ifconfig
这样,我们新启动的这个容器,就会直接加入到 ID=4ddf4638572d 的容器,也就是我们前面的创建的 Python 应用容器(PID=25686)的 Network Namespace 中。所以,这里 ifconfig 返回的网卡信息,跟我前面那个小程序返回的结果一模一样,你也可以尝试一下。
而如果我指定–net=host,就意味着这个容器不会为进程启用 Network Namespace。这就意味着,这个容器拆除了 Network Namespace 的“隔离墙”,所以,它会和宿主机上的其他普通进程一样,直接共享宿主机的网络栈。这就为容器直接操作和使用宿主机网络提供了一个渠道。
转了一个大圈子,我其实是为你详细解读了 docker exec 这个操作背后,Linux Namespace 更具体的工作原理。
这种通过操作系统进程相关的知识,逐步剖析 Docker 容器的方法,是理解容器的一个关键思路,一定要掌握。
现在,我们再一起回到前面提交镜像的操作 docker commit 上来吧。
docker commit,实际上就是在容器运行起来后,把最上层的“可读写层”,加上原先容器镜像的只读层,打包组成了一个新的镜像。当然,下面这些只读层在宿主机上是共享的,不会占用额外的空间。
而由于使用了联合文件系统,你在容器里对镜像 rootfs 所做的任何修改,都会被操作系统先复制到这个可读写层,然后再修改。这就是所谓的:Copy-on-Write。
而正如前所说,Init 层的存在,就是为了避免你执行 docker commit 时,把 Docker 自己对 /etc/hosts 等文件做的修改,也一起提交掉。
有了新的镜像,我们就可以把它推送到 Docker Hub 上了:
$ docker push wilson/helloworld:v2
你可能还会有这样的问题:我在企业内部,能不能也搭建一个跟 Docker Hub 类似的镜像上传系统呢?
当然可以,这个统一存放镜像的系统,就叫作 Docker Registry。感兴趣的话,你可以查看Docker 的官方文档,以及VMware 的 Harbor 项目。
最后,我再来分享一下 Docker 项目另一个重要的内容:Volume(数据卷)。
前面我已经介绍过,容器技术使用了 rootfs 机制和 Mount Namespace,构建出了一个同宿主机完全隔离开的文件系统环境。这时候,我们就需要考虑这样两个问题:
容器里进程新建的文件,怎么才能让宿主机获取到?
宿主机上的文件和目录,怎么才能让容器里的进程访问到?
这正是 Docker Volume 要解决的问题:Volume 机制,允许你将宿主机上指定的目录或者文件,挂载到容器里面进行读取和修改操作。
在 Docker 项目里,它支持两种 Volume 声明方式,可以把宿主机目录挂载进容器的 /test 目录当中:
$ docker run -v /test ...
$ docker run -v /home:/test ...
而这两种声明方式的本质,实际上是相同的:都是把一个宿主机的目录挂载进了容器的 /test 目录。
只不过,在第一种情况下,由于你并没有显示声明宿主机目录,那么 Docker 就会默认在宿主机上创建一个临时目录 /var/lib/docker/volumes/[VOLUME_ID]/_data,然后把它挂载到容器的 /test 目录上。而在第二种情况下,Docker 就直接把宿主机的 /home 目录挂载到容器的 /test 目录上。
那么,Docker 又是如何做到把一个宿主机上的目录或者文件,挂载到容器里面去呢?难道又是 Mount Namespace 的黑科技吗?
实际上,并不需要这么麻烦。
在《理解容器》的分享中,我已经介绍过,当容器进程被创建之后,尽管开启了 Mount Namespace,但是在它执行 chroot(或者 pivot_root)之前,容器进程一直可以看到宿主机上的整个文件系统。
而宿主机上的文件系统,也自然包括了我们要使用的容器镜像。这个镜像的各个层,保存在 /var/lib/docker/aufs/diff 目录下,在容器进程启动后,它们会被联合挂载在 /var/lib/docker/aufs/mnt/ 目录中,这样容器所需的 rootfs 就准备好了。
所以,我们只需要在 rootfs 准备好之后,在执行 chroot 之前,把 Volume 指定的宿主机目录(比如 /home 目录),挂载到指定的容器目录(比如 /test 目录)在宿主机上对应的目录(即 /var/lib/docker/aufs/mnt/[可读写层 ID]/test)上,这个 Volume 的挂载工作就完成了。
更重要的是,由于执行这个挂载操作时,“容器进程”已经创建了,也就意味着此时 Mount Namespace 已经开启了。所以,这个挂载事件只在这个容器里可见。你在宿主机上,是看不见容器内部的这个挂载点的。这就保证了容器的隔离性不会被 Volume 打破。
注意:这里提到的 " 容器进程 ",是 Docker 创建的一个容器初始化进程 (dockerinit),而不是应用进程 (ENTRYPOINT + CMD)。dockerinit 会负责完成根目录的准备、挂载设备和目录、配置 hostname 等一系列需要在容器内进行的初始化操作。最后,它通过 execv() 系统调用,让应用进程取代自己,成为容器里的 PID=1 的进程。
而这里要使用到的挂载技术,就是 Linux 的绑定挂载(bind mount)机制。它的主要作用就是,允许你将一个目录或者文件,而不是整个设备,挂载到一个指定的目录上。并且,这时你在该挂载点上进行的任何操作,只是发生在被挂载的目录或者文件上,而原挂载点的内容则会被隐藏起来且不受影响。
其实,如果你了解 Linux 内核的话,就会明白,绑定挂载实际上是一个 inode 替换的过程。在 Linux 操作系统中,inode 可以理解为存放文件内容的“对象”,而 dentry,也叫目录项,就是访问这个 inode 所使用的“指针”。

正如上图所示,mount --bind /home /test,会将 /home 挂载到 /test 上。其实相当于将 /test 的 dentry,重定向到了 /home 的 inode。这样当我们修改 /test 目录时,实际修改的是 /home 目录的 inode。这也就是为何,一旦执行 umount 命令,/test 目录原先的内容就会恢复:因为修改真正发生在的,是 /home 目录里。
所以,在一个正确的时机,进行一次绑定挂载,Docker 就可以成功地将一个宿主机上的目录或文件,不动声色地挂载到容器中。
这样,进程在容器里对这个 /test 目录进行的所有操作,都实际发生在宿主机的对应目录(比如,/home,或者 /var/lib/docker/volumes/[VOLUME_ID]/_data)里,而不会影响容器镜像的内容。
那么,这个 /test 目录里的内容,既然挂载在容器 rootfs 的可读写层,它会不会被 docker commit 提交掉呢?
也不会。
这个原因其实我们前面已经提到过。容器的镜像操作,比如 docker commit,都是发生在宿主机空间的。而由于 Mount Namespace 的隔离作用,宿主机并不知道这个绑定挂载的存在。所以,在宿主机看来,容器中可读写层的 /test 目录(/var/lib/docker/aufs/mnt/[可读写层 ID]/test),始终是空的。
不过,由于 Docker 一开始还是要创建 /test 这个目录作为挂载点,所以执行了 docker commit 之后,你会发现新产生的镜像里,会多出来一个空的 /test 目录。毕竟,新建目录操作,又不是挂载操作,Mount Namespace 对它可起不到“障眼法”的作用。
结合以上的讲解,我们现在来亲自验证一下:
首先,启动一个 helloworld 容器,给它声明一个 Volume,挂载在容器里的 /test 目录上:
$ docker run -d -v /test helloworld
cf53b766fa6f
容器启动之后,我们来查看一下这个 Volume 的 ID:
$ docker volume ls
DRIVER VOLUME NAME
local cb1c2f7221fa9b0971cc35f68aa1034824755ac44a034c0c0a1dd318838d3a6d
然后,使用这个 ID,可以找到它在 Docker 工作目录下的 volumes 路径:
$ ls /var/lib/docker/volumes/cb1c2f7221fa/_data/
这个 _data 文件夹,就是这个容器的 Volume 在宿主机上对应的临时目录了。
接下来,我们在容器的 Volume 里,添加一个文件 text.txt:
$ docker exec -it cf53b766fa6f /bin/sh
cd test/
touch text.txt
这时,我们再回到宿主机,就会发现 text.txt 已经出现在了宿主机上对应的临时目录里:
$ ls /var/lib/docker/volumes/cb1c2f7221fa/_data/
text.txt
可是,如果你在宿主机上查看该容器的可读写层,虽然可以看到这个 /test 目录,但其内容是空的(关于如何找到这个 AuFS 文件系统的路径,请参考我上一次分享的内容):
$ ls /var/lib/docker/aufs/mnt/6780d0778b8a/test
可以确认,容器 Volume 里的信息,并不会被 docker commit 提交掉;但这个挂载点目录 /test 本身,则会出现在新的镜像当中。
以上内容,就是 Docker Volume 的核心原理了。
总结
在这次分享中,我用了一个非常经典的 Python 应用作为案例,讲解了 Docke 容器使用的主要场景。熟悉了这些操作,你也就基本上摸清了 Docker 容器的核心功能。
更重要的是,我着重介绍了如何使用 Linux Namespace、Cgroups,以及 rootfs 的知识,对容器进行了一次庖丁解牛似的解读。
借助这种思考问题的方法,最后的 Docker 容器,我们实际上就可以用下面这个“全景图”描述出来:
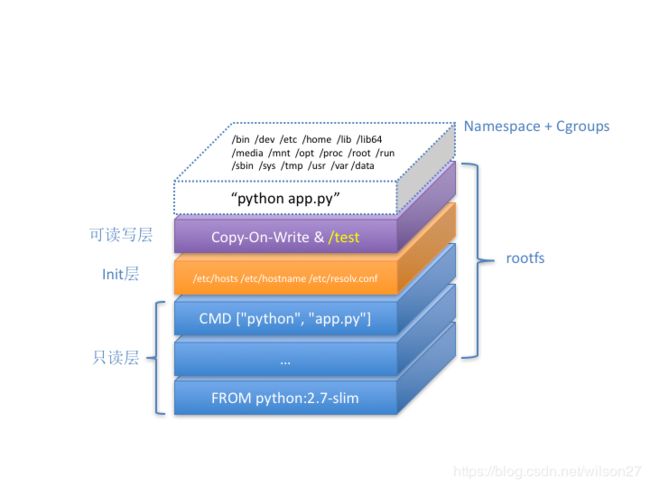
这个容器进程“python app.py”,运行在由 Linux Namespace 和 Cgroups 构成的隔离环境里;而它运行所需要的各种文件,比如 python,app.py,以及整个操作系统文件,则由多个联合挂载在一起的 rootfs 层提供。
这些 rootfs 层的最下层,是来自 Docker 镜像的只读层。
在只读层之上,是 Docker 自己添加的 Init 层,用来存放被临时修改过的 /etc/hosts 等文件。
而 rootfs 的最上层是一个可读写层,它以 Copy-on-Write 的方式存放任何对只读层的修改,容器声明的 Volume 的挂载点,也出现在这一层。