【CANopen】CAN总线的高级协议详解
目录
- 简介
- CAL(CAN Application layer)
- CANopen
- CANopen对象字典(CANopen Object Dictionary)
- CANopen communication
- 管理消息(Administrative message)
- 服务数据对象(Service Data Object,SDO)
- 过程数据对象(Process Data Object,PDO)
- 预定义消息或特殊功能对象(Predefined messages or Special Function Objects)
- 同步(Synchronization,SYNC)
- 时间戳(Time Stamp)
- 紧急(Emergency)
- 节点/生命守护(Node/Life Guarding)
- 启动(Boot-up)
- 小结
- CANopen预定义的连接设置(Predefined Connection Set)
- CANopen标识符分配(identifier distribution)
- 使用预定义的Master/Slave连接集
- 上电后修改PDO标识符
- 使用CAL DBT服务
- CANopen 启动过程(boot-up process)
- CANopen消息语法的细节(Details of CANopen message syntax)
- NMT模块控制(NMT Module Control)
- NMT节点守护(NMT Node Guarding)
- NMT启动(NMT Boot-up)
- PDO
- SDO
- 初始化下载域(Initiate Domain Download)
- 下载分段域(Download Domain Segment)
- 初始化上传域(Initiate Domain Upload)
- 上传分段域(Upload Domain Segment)
- 终止域传输(Abort Domain Transfer)
- 初始化块下载(Initiate Block Download)
- 下载块段(Download Block Segment)
- 结束块下载(End Block Download)
- 初始化块上传(Initiate Block Upload)
- 上传块段(Upload Block Segment)
- 结束块下载(End Block Upload)
- SDO终止码(SDO Abort Codes)
- 紧急对象(Emergency Object)
- 总结
本文是对《CANopen high-level protocol for CAN-bus.pdf》的翻译及解析。由于作者能力有限,如有错误,望纠正!
交流QQ群:429346143。
《CANopen high-level protocol for CAN-bus.pdf》的翻译及解析下载地址: https://download.csdn.net/download/xiuhua_wu/10916762
简介
从OSI七层网络模型角度来观察,现场总线网络(Fieldbus networks)通常只有第1层(物理层,Physical Layer)、第2层(数据链路层,DataLink Layer)和第7层(应用层,Application Layer)。CAN(Controller Area Network)总线也是如此,CAN总线只定义了第1层物理层和第2层数据链路层(ISO1 1898)。这两层完全由CAN硬件处理,从而大大地提高了现场总线节点固件的开发效率。
CAN总线的高级协议通过定义CAN报文的11位标识符和8字节数据的使用方式,从而保证了基于CAN标准的工业化系统的互操作性和互换性。不同制造商要求使用标准化的应用层协议和配置文件(profiles),从而实现了通信系统、设备功能和系统管理的标准化。
- 应用层(application layer):提供一系列的服务和协议给网络上的每个设备。
- 通信配置文件(communication profile):提供配置设备和通讯数据的方法,并定义数据如何在设备之间通信。
- 设备配置文件(device profiles):为设备添加特定于设备的行为。
| OSI(七层网络模型) | CANopen标准在OSI网络模型的映像 |
|---|---|
 |
 |
下面将介绍CANopen标准所在的CAN网络CAL(CAN Application layer)、CANopen本身以及定义CANopen的配置文件。
CAL(CAN Application layer)
CAL(CAN Application layer)是基于CAN网络的高层通讯协议之一,由飞利浦医疗系统发展而来。它被独立的CAN用户和制造商集团CiA采用,并进一步开发并发布了一系列的标准。CAL提供了4个应用层服务元素:
- CMS(CAN-based Message Specification,CAN报文规范):提供了变量(Variable)、事件(Event)、域(Domain)类型的对象,设计和指定如何通过CAN接口访问设备(节点)的功能。
- NMT(Network Management,网络管理):提供支持网络管理的服务,如:初始化、启动/停止节点、检测节点异常。这个服务是基于master-slave概念实现的。
- DBT(Distributor,经销商):为网络上的节点提供一个动态分配的CAN标志符(官方称为:COB-ID,Communication Object Identifier)。这个服务是基于master-slave概念实现的。
- LMT(Layer Management):提供改变层参数的功能,如:改变节点的NMT地址、改变CAN接口的bit-timing和baud-rate。
CMS定义了8个优先级组,每组有220个COB-IDs,取值范围:[1, 1760]。0和[1761, 2031]是NMT、DBT和LMT的保留标识符。在CAN网络中,COB-ID的数值越小,其在网络上的优先级越高。

NOTE:
CAL标准假定CAN2.0A(CAN Standard Message Frame)有11位的标识符,取值范围为[0, 2047],但由于历史原因,实际取值范围限定在[0 , 2031]。在使用CAN2.0B(CAN Extended Message Frame)时,其有29位的标识符,取值范围和优先级仍符合上图的描述,图中的11位范围映射到29位COB-ID的11个最重要的位,表中的COB-ID范围将增大。
CANopen
CAL提供了所有网络管理服务和报文协议,但是它并没有定义CMS对象的内容或通讯对象的类型(it defines how, not what)。CANopen建立在CAL之上,使用了CAL服务和通讯协议的子集,提供了基于CAL服务和协议的分布式控制系统(A distributed control system)的实现,使网络节点能够从简单的功能扩展至复杂的功能,同时不影响网络节点的之间的互操作性。
CANopen的核心概念:设备对象字典(the Device Object Dictionary, OD),这是在其他现场总线系统中使用的概念(Profibus, Interbus-S)。
NOTE:
设备对象字典(Object Dictionary)的概念并不是来至CAL,它是CANopen的一个实现方式。
下面,首先先介绍设备对象字典,然后再接收CANopen通讯机制。
CANopen对象字典(CANopen Object Dictionary)
CANopen对象字典(OD)是对象的有序分组,每个对象使用16位索引寻址。为了实现对数据结构体的各个元素进行访问,还定义了一个8位的子索引(sub-index)。CANopen OD的总体布局如下图所示。

NOTE:
不要被OD中小于0x0FFF索引值的数据类型(data type)所迷惑,它们主要是为了定义而存在的。节点OD的实际相关范围为[0x1000, 0x9FFF]。
网络上的每一个节点都存在一个OD,OD包含了描述设备及其网络行为的所有参数。节点的OD主要是以EDS或纸质的数据库(database)形式存在。这不一定需要通过CAN总线查询(interrogate)节点OD中的所有参数,只要节点的行为和其在纸上的OD描述完全一致,就足够了。节点本身必须能够显示所有强制性OD条目(由CANopen指定,这些条目实际上非常少)和可选的条目(如:节点的可配置功能)。
CANopen是通过配置文件(profiles)形式定义的:
- 通讯配置文件(Communication profile):描述了OD的一般形式、OD中通信配置文件相关的对象以及通讯参数,通常也描述CANopen的通讯对象(Communication object)。这个配置文件适用于所有的CANopen设备。
- 设备配置文件(device profile):各种设备配置文件为特定类型的设备定义OD对象。现在大约有5种不同的设备配置文件,还有几种正在开发中。
配置文件描述了每个OD对象的功能(function)、名称(name)、索引(index)、子索引(sub-index)、数据类型(data type)、对象是否强制的(mandatory)或可选的(optional)、对象是否只读(read only)、只写(write only)或可读/写(read/write),等等。
NOTE:
设备通讯功能和对象、其设备特性相关的对象及其默认值的描述是以电子数据表(Electronic Data Sheet, EDS)的形式提供,EDS是具有严格定义语法ASCII文件。
| The description of a device’s communication functionality and objects and its device-specific objects and their default values is proviced in the form of an Electronic Data Sheet (EDS), an ASCII file with a strictly defined syntax. |
|---|
单个设备的对象配置描述以设备配置文件(Device Configuration File, DCF)形式提供,其结果与EDS相同。
| A description of the object configuration of an individual device is called a Device Configuration File (DCF) and has the same structure as an EDS. |
|---|
EDS和DCF的文件类型都在CANopen规定中定义。
配置文件定义了哪些OD对象是强制的,哪些OD对象是可选的。强制对象的数量需要保持在允许的最小实现(lean implementation)。通讯部分和设备特性相关的部分的可选功能可以根据需求添加,以扩展CANopen设备的功能。若有更多的特征被要求加入配置文件,那么配置文件需要有足够的空间来添加制造商相关的功能。
因此,描述通信参数的OD部分对所有CANopen设备都是相同的(也就是说,放置在OD中的对象是相同的,而不是对象的值)。同时,OD中不同设备特性相关的部分对于不同设备来说是不同的。
CANopen communication
上面我们已经介绍了对象字典的概念,那么现在我们来看看CANopen网络中通讯报文的内容和功能,换个词语表达:CANopen 通讯模型(CANopen Communication model)。
NOTE:
请确保OD对象(以OD索引和子索引作为特征)和通讯对象或消息(以COB-ID或CAN标识符为特征)已区分。
CANopen通讯模型定义了4种消息(messages, communication object):
- 管理消息(Administrative meaasge)
- 服务数据对象(Service Data Object, SDO)
- 过程数据对象(Process Data Object, PDO)
- 预定义消息或特殊功能对象(Predefined messages or Special Function Objects)
上述的communication object以小节的形式进行描述。
管理消息(Administrative message)
管理消息(Administrative meaasge)包含三个内容:
- 层管理(Layer Management)
- 网络管理(network management)
- 标识符分发服务(identifier distribution services)
如:初始化(initialisation)、配置(configuration)、监督网络(supervision of the network,包含节点/生命守护(node/life guarding))等。
服务和协议是依据CAL的LMT、NMT和DBT服务元素定制的。这些服务都是遵循Master-Slave 概念:在CAN网络中,有且只有1个LMT、NMT和DBT Master,有1个或多个Slaves。
服务数据对象(Service Data Object,SDO)
每个SDO作为客户机(client)通过对象字典的索引(index)和子索引(sub-index)访问设备字典(设备作为server)中的条目,索引信息包含在CAN消息中的前几个字节中。
依据CAL的表述,SDO被实现为“多路复用域”(Multiplexed Domain)类型的CMS对象,因此允许传输任意长度的数据。在必要时数据会被分割成多个CAN消息,此时,数据占用超过4个字节。
SDO协议属于“确认服务”(confirmed service)类型:每个CAN消息生成一个应答(一个SDO需要2个CAN 标识符)。SDO请求和应答消息总是包含8个字节,因此通过SDO进行通信的开销相当大。携带协议信息的非有效字节数总是最为第一个字节的一部分显示。
过程数据对象(Process Data Object,PDO)
PDO用于传输实时数据:数据从一个生产者(producer,有且只有1个)传输至一个或多个消费者(consumers)。数据传输限制在1~8字节,如:一个PDO最大可传输64个数字I/O值或4个16位模拟输入。
PDO没有协议开销(It has no protocol overhead)。PDO的数据内容仅通过其CAN 标识符定义,并且假定发送方(sender)和接收方(receivers)都知道该内容。
每个PDO由对象字典中的两个对象描述:
- PDO通讯参数(PDO Communication Parameter):包含PDO的COB-ID、传输类型、抑制时间和计时器周期。
- PDO映像参数(PDO Mapping Parameter):包含映射到PDO的对象字典中的对象列表,包含它们的大小(单位:bits)。PDO的生产者(producer)和消费者(consumers)都必须知道映射关系,以便能够解析PDO的内容。
PDO消息的内容都是预定义的或者在网络启动时配置的。应用程序对象在PDO中的映射都是在设备字典中的PDO映射参数中描述的。如果设备支持可变PDO映射,那么还可以通过SDO消息对PDO消息的内容进行配置。
PDO有如下的传输模式:
- 同步(Synchronous):通过接收同步对象(SYNC object)进行同步。
♢ 非周期(Acyclic):同步非周期信息。
█ 远程传输请求:传输是由来自另一个设备的远程传输请求“预先触发”(remote transmission request)。
█ 指定对象(设备)特定事件:传输是由设备配置文件中指定的对象(设备)特定事件的发生“预先触发”。
| transmission is ‘pre-triggered’ by the occurrence of an object- (device-)specific event specified in the device profile. |
|---|
♢ 周期(cyclic):每1/2条或最多240条同步消息后,会周期性地触发传输。
| transmission is triggered periodically after every 1, 2 or up to 240 SYNC messages. |
|---|
- 异步(Asynchronous)
- 传输由来自另一个设备的远程传输请求(通过CAN远程帧)触发。
- 传输是由设备配置文件中指定的对象(设备)特定事件的发生触发的。如:an input-change-of-value 或计时器事件。
下图介绍了CANopen中PDO传输类型的定义。对于类型1到240,数字表示两个PDO传输之间的同步对象的数量。

每个PDO可分配1个抑制时间(inhibit time),用于定义两个连续PDO传输之间的最小时间,以防止网络上的等待(starvation)。抑制时间是PDO通信参数对象的一部分。类型:unssigned 16-bit;单位:100us。
每个PDO可以分配一个事件计时器周期(event timer period)。在一个时间计时器周期内,当指定的时间已经过去,PDO传输将周期性地触发(没有出现替代触发器)。类型:unssigned 16-bit;单位:1ms。
依据CAL的说法,PDO是一个存储-事件(Stored Event)类型的CMS对象的实现。这意味着数据PDO数据传输是没有协议开销的,并且消息没有应答机制(PDO只需要1个CAN标识符)。最大能传输8字节(64比特)的数据。
预定义消息或特殊功能对象(Predefined messages or Special Function Objects)
预定义消息或特殊功能对象包含如下内容:
- 同步(Synchronization, SYNC)
- 时间戳(Time Stamp)
- 紧急(Emergency)
- 节点/生命守护(Node/Life Guarding)
- 启动(Boot-up)
同步(Synchronization,SYNC)
SYNC用于网络范围内的同步任务(尤其是与驱动程序相关的任务)。实际输入的数值准时地(quasi-simultaneously)存储在全网中,若要求传输,输出值将根据上一次的SYNC接收到的信息进行更新。
| Used to synchronize tasks network-wide (particularly relevant for drive applications): actual values of inputs are stored quasi-simultaneously network-wide and subsequently transmitted (if required), output values are updated according to messages received after the previous SYNC. |
|---|
SYNC基于Master-slave概念:SYNC主机发出周期新同步对象,SYNC从机在接收端(reception)执行(carry out)同步任务。
关于SYNC消息传输的同步PDO的传输是在给定的时间窗口内进行的。
| Transmission of a synchronous PDO is within a given time window with respect to the transmission of the SYNC message. |
|---|
SYNC在实现中是“基本变量”(Basic Variable)类型的CMS对象。
CANopen建议在高优先级组中设置一个COB-ID,确保定时同步信号。为了保证消息尽可能的短,SYNC不传输任何数据字节。
时间戳(Time Stamp)
Time Stamp为应用程序设备提供公共的时间帧参考,在实现中是“存储事件”(Stored Event)类型的CMS对象。
紧急(Emergency)
Emergency是右设备内部故障的发生而触发的,在实现中是“存储事件”(Stored Event)类型的CMS对象。
节点/生命守护(Node/Life Guarding)
Node/Life Guarding基于Master-slave概念。
Life Guarding:NMT Master 监控节点的状态称为生命守护(Life Guarding)。在接收到来至NMT Master的第一个节点守护信息后,Life Guarding在NMT Slave中启动。
检测(Detects)到设备网络接口中的错误,而不是设备本身的错误,将通过Emergency报告。
Node/Life Guarding根据NMT节点保护协议实现。一个从NMT Master到特定节点的远程传输请求,将触发一个应答,应答中包含节点的状态。
启动(Boot-up)
Boot-up基于Master-slave概念。通过发送Boot-up消息,NMT Slave 向NMT Master表明其已经从初始化状态过渡到运行前(peroperational)状态。
小结
SDO和PDO都是用于数据传输的,它们实现了两种不同的数据传输机制。
- SDO用于(大的)低优先级的设备之间的数据传输,最常应用于CANopen网络设备的配置。
- PDO用于快速的8字节的数据传输,或者,没有协议开销的数据传输(这意味着数据内容要预定义)。
CANopen设备必须支持许多的网络管理服务,并至少需要一个SDO。每个CANopen设备,无论是生产者(produces)或者消费者(consumes)要处理数据就必须有至少一个PDO。所有的其他通信对象都是可选的。
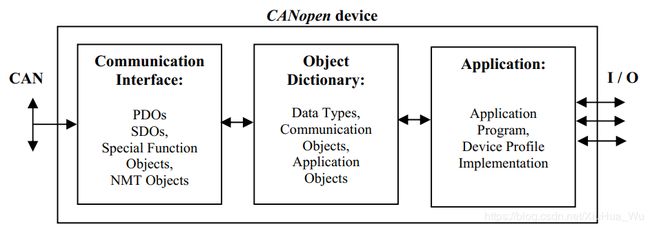
CANopen设备的CAN通信、OD和应用程序之间的关系如下图所示。
CANopen预定义的连接设置(Predefined Connection Set)
为了减小简单网络的配置工作量,CANopen定义了一个强制性的默认CAN标志符分配方案。这些标志符在初始化后立即进入预操作状态(Pre-Operational State),可以通过动态分配(dynamic distribution)的方式进行修改。设备必须仅为支持的通信对象提供相应的标识符。
分配方案(The allocation scheme)是基于将11-bit的CAN标识符分成4-bit功能码(function code)和7-bit节点标志符(Node-ID)实现的。

Node-ID是由系统集成商(system integrator)定义的,如:在设备上设置DIP开关。Node-ID的取值范围为1~127,0值是不允许使用的。
预定义连接设置定义了:
- 4个接收PDOs
- 4个发送PDOs
- 1个SDO(出现2个CAN标志符)
- 1个Emergency对象
- 1个Node-Error-Control标识符
预定义还支持未确认的NMT模块控制服务(NMT-Module-Control services)、SYNC和Time Stamp对象的广播(broadcasting)。
CAN标识符分配方案如下图所示。

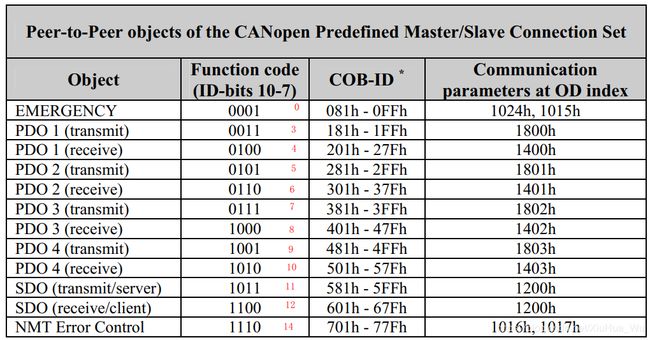
标识符分配对应Master/Slave连接集,因为所有对等(peer-to-peer)的标识符都是不同,那么实际上只有Master设备才知道所有已连接的Node-IDs,Master设备可以与任意单个已连接的Slave节点(up to 127 nodes)以对等的方式通信。两个已连接的Slave是不能够通信的,因为他们并不知道对方的Node-ID。
将默认的CANopen集合(set)的标识符映射与CAL的映射进行比较,可以清楚地看到,具有特殊功能定义的CANopen对象映射到CAL的通用CMS对象时,表明CANopen通过使用更通用的CAL设施(facilities)实现一个系统。
CANopen标识符分配(identifier distribution)
CANopen的CAN标识符(或者COB-IDs)的分配有三种改变途径:
- 使用预定义的Master/Slave连接集
- 上电后修改PDO标识符
- 使用CAL DBT服务
使用预定义的Master/Slave连接集
标识符的分配是默认的,无需配置。若节点支持对PDO数据内容进行配置,那么PDO可配置是必须的。
上电后修改PDO标识符
当节点是预操作状态,使用SDO写入新值到节点OD的合适位置。
使用CAL DBT服务
连接到CANopen网络的节点或者Slave最初是通过已配置的Node-ID标识的。Node-ID可以通过设置设备上的DIP开关或者通过CAL的层管理服务(LMS)来进行配置。当网络初始化或引导时,网络Master首先与每个已连接的Slave通过“连接远程节点”(Connect Remote Node)电报(telegram)方式建立(establishes)个对话框(dialog)。
NOTE:
连接远程节点电报(Connect Remote Node telegram)是一个CAL NMT服务。
一旦建立此对话框后,用于SDOs和PDOs通讯的CAN标识符将分配到使用CAL DBT服务的节点上,这要求节点必须支持扩展启动(extended boot-up)。
CANopen 启动过程(boot-up process)
在网络初始化过程中,CANopen支持所谓的扩展启动(extended boot-up)以及所谓的最小启动过程。扩展启动时可选的,但是,所有CANopen设备或节点必须支持最小启动。这两种类型的节点可以同时存在于同一个网络中。
当标识符是通过CAL的DBT服务分配的,那么节点必须支持扩展启动。两种初始化过程都可以用设备或节点状态转换表示,如下图所示。

NMT服务用于在任意时间将选定的或所有的节点带入各种操作状态。携带NMT服务的CAN消息由CAN-Header(COB-ID=0)和2个字节组成。第1个字节包含请求服务(“NMT命令说明符”(NMT command specifier)),第2个字节包含Node-ID或者0(0表示寻址所有的节点)。
在CAN网络中,有且只有1个节点是NMT Master。NMT Master发出NMT消息并控制节点初始化过程。
若CANopen设备只支持最小启动,那么这个设备称为:最小功能设备(minimum capability devices)。最小功能设备在设备初始化结束后,自动地进入Pre-Operational状态。在这种状态下,可以通过SDO对设备参数化(device parameterization)和COB-ID分配。
通过将设备切换到Prepared状态,设备被迫地完全停止通信,如果设备支持并处于活动状态,那么设备仍可进行NMT服务和节点保护(node guarding)。
CANopen消息语法的细节(Details of CANopen message syntax)
在下面的章节中,将介绍COB-IDs是如何在CANopen预定义连接集中定义的。
NMT模块控制(NMT Module Control)
只有NMT Master能发出NMT模块控制消息,所有的Slaves必须支持NMT模块控制服务。NMT模块控制消息是没有响应的。NMT模块控制消息格式如下:

NMT节点守护(NMT Node Guarding)
NMT Master通过使用节点守护可以检测每个节点的当前状态,尤其是,当这些节点没有定期轮循数据时,这个方法特别有用。
NMT Master发送一个CAN远程帧(remote frame,no data bytes)格式如下:

NMT Slave回复如下:

或者(Alternatively),节点可以配置为周期性的心跳消息(periodical Heartbeat message):

当带有心跳的节点启动时,它的启动信息是其第一个心跳消息。心跳用户通常是NMT Master,它应该为每个带心跳的的节点提供超时机制,并且在超时后提供适当的操作。
NOTE:
节点不允许同时支持节点保护和心跳协议。
NMT启动(NMT Boot-up)
NMT Slave发出启动消息,向NMT Master表明它从初始化状态进入了预操作状态。

PDO
举个例子,假设第2个发送PDO的映射如下所示(在CANopen中,由OD的0x1A01条目描述):

在CANopen的I/O模块的设备配置文件(CiA DSP-401)定义中,对象0x6000的子索引0x02是节点的8bits数字输入的第二个集合;对象0x6401的子索引0x01是节点的16bits模拟输入的第一个集合。
PDO发送的CAN消息包含3个数据字节,如下所示:

通过改变对象0x1A01的内容,可以改变PDO的内容(如果节点支持可变PDO映射(variable PDO mapping))。
多路复用PDO(Multiplexor PDO,MPDO)定义,允许单个PDO通过在消息字节中包含源(source)或目标(destination)Node-ID和OD索引和子索引来发送多个变量。举个栗子,某个节点有64个16Bits模拟通道,如果没有这样的机制(mechanism),那么需要16个不同的发送PDOs来发送它的消息。
SDO
SDO用于访问设备的OD。OD访问的请求程序,称为Client;若CANopen设备的OD被访问并为请求提供服务,那么这个设备称为Server。Client的CAN消息和Server 回复的CAN消息均是由8Bytes组成(尽管并非所有字节都必须包含有意义的数据)。Client端的请求总是由Server的回复确认的。SDO传输有两种机制:
- 快速传输(Expedited transfer):用于长度不超过4字节的数据对象。
- 分段传输(Segmented transfer):用于长度超过4字节的数据对象。
SDO的基本结构:
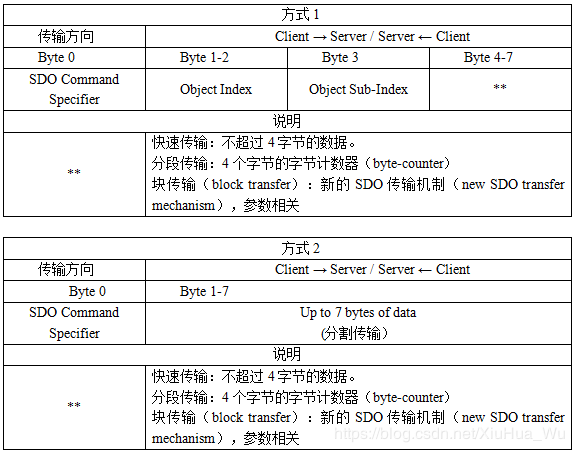
SDO Command Specifier 可包含如下信息:
- 下载/上传(download / upload)
- 请求/响应(request / response)
- 分段/快速传输(segment / expedited transfer)
- CAN帧的数据字节数量(number of data bytes in this CAN-frame)
- 每个后续段的交替切换位(alternating toggle bit for each subsequent segment)
SDO共有5种请求/响应协议:
- 初始化下载域(Initiate Domain Download)
- 下载分段域(Download Domain Segment)
- 初始化上传域(Initiate Domain Upload)
- 上传分段域(Upload Domain Segment)
- 终止域传输(Abort Domain Transfer)
在最新的CANopen通信配置文件版本中,一个新的SDO传输机制是这么介绍的,块传输(Block transfer):为了增加长度大于4字节的对象的总线吞吐量,多个段数据由1个确认消息确认(从Server下载,从Client上传)。相关协议如下:
- 初始化块下载(Initiate Block Download)
- 下载块段(Download Block Segment)
- 结束块下载(End Block Download)
- 初始化块上传(Initiate Block Upload)
- 上传块段(Upload Block Segment)
- 结束块上传(End Block Upload)
NOTE:
- Download:写到OD中;Upload:从OD中读出。
- 这些协议的SDO Command Specifier(SDO CAN消息的第一个数据字节)的语法和细节如下面小节所示。
- “-”表示don’t care,应该置为0。
初始化下载域(Initiate Domain Download)

下载分段域(Download Domain Segment)

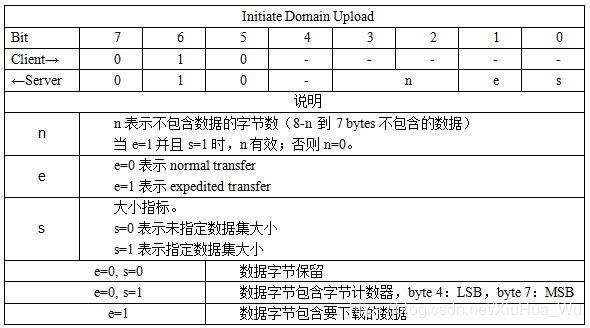
初始化上传域(Initiate Domain Upload)
上传分段域(Upload Domain Segment)

终止域传输(Abort Domain Transfer)
SDO的Client或者Server可以通过发送带以下SDO Command Specifier的消息来终止一次SDO传输。

在终止域传输的情况下,数据字节0和1包含对象的索引,字节2包含对象子索引,数据字节4~7包含描述中止原因的32位中止码。
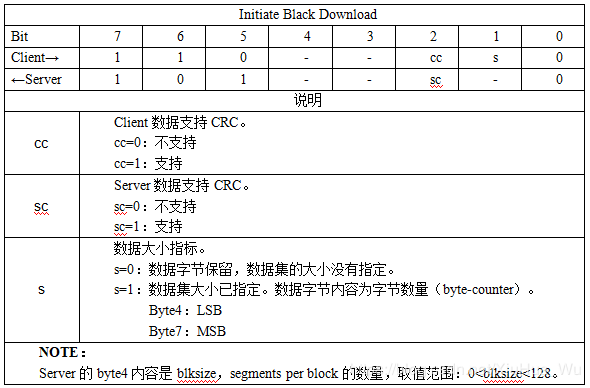
初始化块下载(Initiate Block Download)
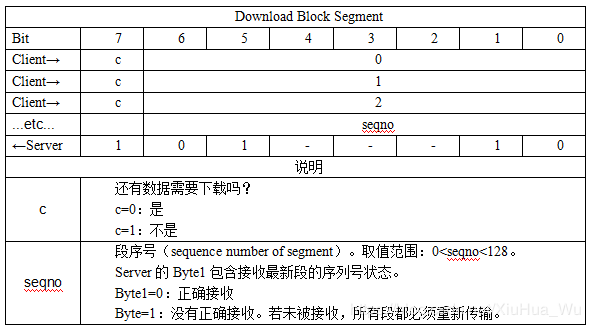
下载块段(Download Block Segment)
结束块下载(End Block Download)

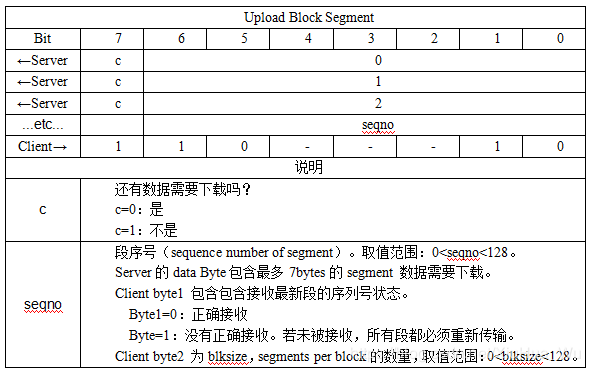
初始化块上传(Initiate Block Upload)

上传块段(Upload Block Segment)
结束块下载(End Block Upload)

SDO终止码(SDO Abort Codes)
SDO终止码(SDO Abort Codes)在byte4-7,大小:32bits。


紧急对象(Emergency Object)
Emergency messages 是由设备内部(致命)错误情况发生而触发的,并从相关应用程序设备传输到具有最高优先级的其他设备。它们也用于中断类型错误警报。一个Emergency messages由8字节组成,格式如下:

紧急错误码(Emergency Error Codes)如下表所示。其中,“xx”部分表示有设备配置文件定义。

错误寄存器是在设备OD(索引:0x1001)中。设备可以在这个状态字节中映射内部错误,提供当前错误的快速概览。位含义如下图所示:
| Bit | Error type |
|---|---|
| 0 | 通用的(generic) |
| 1 | 电流(current ) |
| 2 | 电压(voltage) |
| 3 | 温度(temperature) |
| 4 | 通信(communication) |
| 5 | 设备配置文件特性(device profile specific) |
| 6 | Reserved(=0) |
| 7 | 制造商特性(manufacturer specific ) |
NOTE:
制造商特性(manufacturer specific )错误字段可能包含关于错误的任何奇特与设备相关的附加信息。
总结
综上所述,基于CAN总线的完了通讯 CANopen标准具有如下的特点:
- 设备功能的标准化描述是设备对象字典的一种方式。
- 设备的标准化描述和它的配置都是采用ASCII格式文件:电子数据表(EDS)和设备配置文件(DCF)。
- 基于CAL CMS的数据交换与系统管理。
- 基于CAL NMT的标准化系统启动和节点保护。
- 系统范围同步操作的定义。
- 定义特定于节点的紧急消息。
通过遵循CANopen通信配置文件和相应的CANopen设备配置文件中包含的指导方针,两个独立的制造商可以生产标准化的设备,这些设备可以被合并到同一个CANopen CAN网络中。
可以区分下面3个级别的兼容性(安装兼容性的增加顺序):
- 一致性(Conformance):应用层兼容性。设备可以连接到CANopen网络,而不会干扰其他设备的通信。
- 互操作性(Interoperability):通信配置文件兼容性。设备可以与网络中的其他节点交互数据。
- 可交换性(Interchangeability):设备可以替代另一个设备配置文件兼容性。
CANopen设备至少需要(最小能力设备):
- 一个Node_ID
- 一个OD(内容由设备功能而定)
- 一个支持强制OD条目(read-only)的SDO
- 支持以下NMT Slave服务
- Reset_Node
- Enter_Preoperational_State
- Start_Remote_Node
- Stop_Remote_Node
- Reset_Communication
- 默认配置文件ID分配