通俗易懂 | 拉格朗日乘子法
在SVM中,将约束问题转化成非约束问题采用到了拉格朗日乘子法。这个文章就讲一下拉格朗日乘子法与KKT约束是怎么回事。本人不是数学科班出身,但是也只能硬着头皮讲一讲了。
从零理解
现在我们要解决这样一个问题:
x 2 y = 3 x^2y=3 x2y=3
这个函数距离原点最近的距离是多少。
先画出函数图像:

然后想求出最短距离:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-67S61XVm-1595354231426)(http://helloworld2020.net/wp-content/uploads/2020/07/20180801104757795.gif)]
这里的思路就是,做一个以原点为中心的圆形:

不断扩大圆形的半径,直到圆与蓝色的曲线相切:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-SnywXmuc-1595354231433)(http://helloworld2020.net/wp-content/uploads/2020/07/20180801104757971.gif)]
现在。第一次与 x 2 y = 3 x^2y=3 x2y=3相交的点就是距离原点最近的那个点:
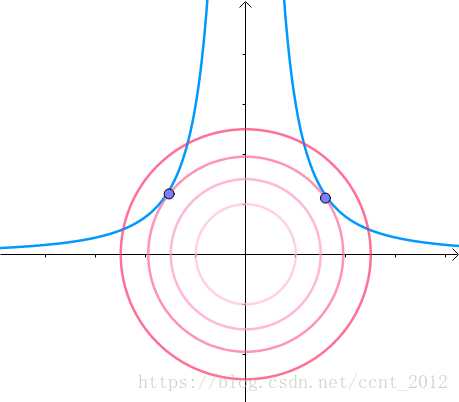
这个,圆形与曲线相切,且切线既是圆形的切线,也是曲线的相切。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-ACFNdaZh-1595354231436)(http://helloworld2020.net/wp-content/uploads/2020/07/wp_editor_md_e4bad146a7b937e7ea2068618982f6dc.jpg)]
这时候,这个切线的垂线其实也就是我们所说的梯度,也叫做等高线的法线,看下面两个图可能会好理解一些:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-a33rmzBO-1595354231438)(http://helloworld2020.net/wp-content/uploads/2020/07/wp_editor_md_c46aaf66f41e4fef138cb9006f20d493.jpg)]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-YrThjirt-1595354231439)(http://helloworld2020.net/wp-content/uploads/2020/07/wp_editor_md_426f3fb9f7c0bd283d01add99977b48e.jpg)]
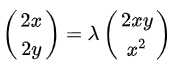
那么这个梯度怎么计算呢?先看圆形 f ( x , y ) = x 2 + y 2 f(x,y)=x^2+y^2 f(x,y)=x2+y2的梯度:

再看曲线的梯度计算 g ( x , y ) = x 2 y g(x,y)=x^2y g(x,y)=x2y的梯度:

在相切的时候,两者的梯度方向都在同一条直线上,可以称之为,成比例,这里用比例系数 λ \lambda λ来表示:
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-GIvVjcDT-1595354231443)(http://helloworld2020.net/wp-content/uploads/2020/07/wp_editor_md_dcad4360b54df3aaa62917e1dca7e94d.jpg)]
所以我们汇总一下所有的已知信息,得到下面的方程组:

可以求解得到:

这个就是拉格朗日乘子法的直观理解。
抽象成数学的形式
我们要解决的问题:
min x 2 + y 2 \min {x^2+y^2} minx2+y2
s . t . x 2 y = 3 s.t. x^2y=3 s.t.x2y=3
我们会将约束问题通过拉格朗日乘子法转换成非约束问题:
min F ( x , y ) = x 2 + y 2 + λ ( x 2 y − 3 ) \min F(x,y)={x^2+y^2+\lambda(x^2y-3)} minF(x,y)=x2+y2+λ(x2y−3)
【为什么可以这样呢?】
如果求极值,偏导数为0。先对上面的公式进行求偏导数:
∂ F ( x , y ) ∂ x = 2 x + λ 2 x y = 0 \frac{\partial F(x,y)}{\partial x}=2x+\lambda 2xy=0 ∂x∂F(x,y)=2x+λ2xy=0
∂ F ( x , y ) ∂ y = 2 y + λ x 2 = 0 \frac{\partial F(x,y)}{\partial y}=2y+\lambda x^2=0 ∂y∂F(x,y)=2y+λx2=0
这两个等式与这个等价,唯一的不同就是 λ \lambda λ一个是正数一个是负数:
当然,对于 x 2 y − 3 = 0 x^2y-3=0 x2y−3=0这个条件,我们也可以写成 ∂ F ( x , y , λ ) ∂ λ \frac{\partial F(x,y,\lambda)}{\partial \lambda} ∂λ∂F(x,y,λ),所以,可以得到这样的一个方程组:

KKT条件
- KKT的英文全称:Karush-Kuhn-Tucker
之前的拉格朗日的约束条件是等值的,现在可以通过KKT条件推广到不等式。因为限制条件往往是不大于,小于这样的不等式,所以KKT才是拉格朗日化约束问题为非约束问题的关键。
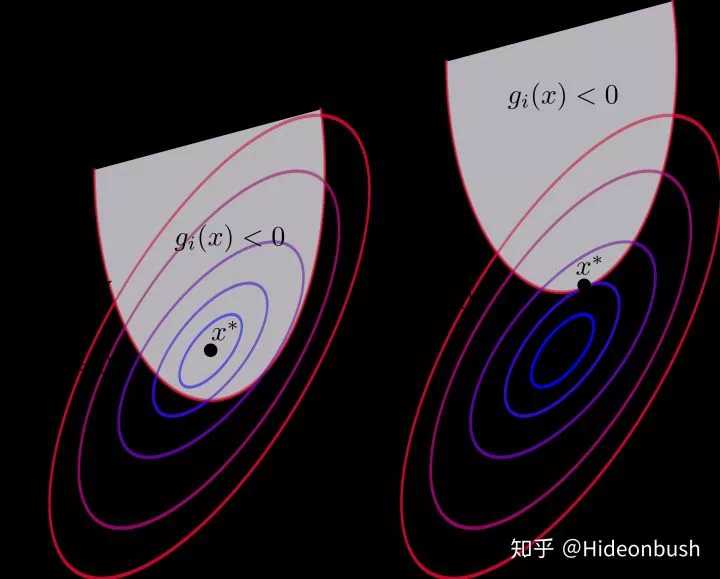
对于不等式问题,就是有两种情况:
- 可行解在g(x)<0;
- 可行解在g(x)=0。
可行解在g(x)<0,就表示这个约束条件并没有起到约束效果,有根没有事一个效果(下图中的左图);可行解g(x)=0,就表示这个约束条件起到作用了,这就表示g(x)与f(x)相切,也就是下图中右边的图。
【g(x)<0的情况】
这种情况下,就是没有限制条件下的情况,其实就是没有约束条件的限制,也就是 λ = 0 \lambda=0 λ=0的情况,所以我们的等式就是直接求解:
Δ f ( x ) = 0 \Delta f(x)=0 Δf(x)=0
【g(x)=0的情况】
如果是g(x)=0的情况,那也就是约束条件起到作用了,也就意味着 λ > 0 \lambda>0 λ>0。在这种情况下,存在着:
Δ f ( x ) = − λ Δ g ( x ) \Delta f(x) = -\lambda \Delta g(x) Δf(x)=−λΔg(x)
并且两个函数的扩张的方向相反,所以表明两个g(x)和f(x)的梯度一个是正数,一个是负数。所以这个表示 λ > 0 \lambda>0 λ>0。
所以综上所述,在这种情况下,我们所有的条件综合起来可以得到,其中KaTeX parse error: Undefined control sequence: \* at position 3: x^\̲*̲就是最优解:
- λ > = 0 \lambda >=0 λ>=0
- λ g ( x ∗ ) = 0 \lambda g(x^*)=0 λg(x∗)=0
- $ g(x^*) <= 0$
这三个就是KKT条件。