opencv入门基础(c++)【五】
opencv入门基础(c++)
- 二十五、 轮廓发现(find contour in your image)
- 25.1轮廓发现(find contour)
- 轮廓发现findContours
- 轮廓绘制(draw contour)
- 步骤
- 二十六、凸包-Convex Hull
- 26.1什么是凸包(Convex Hull)
- 26.2概念介绍-Graham扫描算法
- 26.3API说明cv::convexHull
- 26.4实现步骤
- 二十七、轮廓周围绘制矩形框和圆形框
- 27.1轮廓周围绘制矩形 -API
- 27.2轮廓周围绘制圆和椭圆-API
- 27.3 实现步骤
- 二十八、图像矩(Image Moments)
- 28.2API介绍与使用 – cv::moments 计算生成数据
- 28.3实现步骤
- 二十九、点多边形测试
- 29.1概念介绍 - 点多边形测试
- 29.2API介绍 cv::pointPolygonTest
- 29.3实现步骤
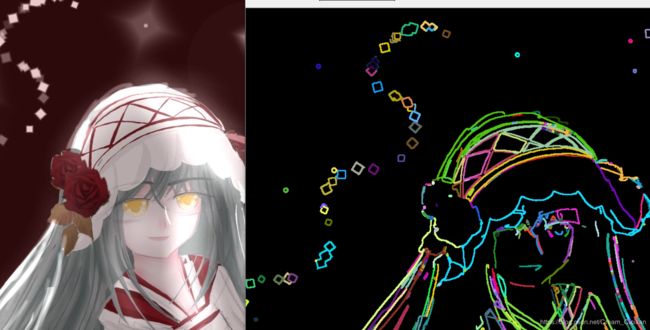
二十五、 轮廓发现(find contour in your image)

25.1轮廓发现(find contour)
轮廓发现是基于图像边缘提取的基础寻找对象轮廓的方法。
所以边缘提取的阈值选定会影响最终轮廓发现结果
API介绍
findContours发现轮廓
drawContours绘制轮廓
轮廓发现findContours
在二值图像上发现轮廓使用API cv::findContours(
InputOutputArray binImg, // 输入图像,非0的像素被看成1,0的像素值保持不变,8-bit
OutputArrayOfArrays contours,// 全部发现的轮廓对象
OutputArray, hierachy// 图该的拓扑结构,可选,该轮廓发现算法正是基于图像拓扑结构实现。
int mode, // 轮廓返回的模式
int method,// 发现方法
Point offset=Point()// 轮廓像素的位移,默认(0, 0)没有位移
)
轮廓绘制(draw contour)
在二值图像上发现轮廓使用API cv::findContours之后对发现的轮廓数据进行绘制显示
drawContours(
InputOutputArray binImg, // 输出图像
OutputArrayOfArrays contours,// 全部发现的轮廓对象
Int contourIdx// 轮廓索引号
const Scalar & color,// 绘制时候颜色
int thickness,// 绘制线宽
int lineType ,// 线的类型LINE_8
InputArray hierarchy,// 拓扑结构图
int maxlevel,// 最大层数, 0只绘制当前的,1表示绘制绘制当前及其内嵌的轮廓
Point offset=Point()// 轮廓位移,可选
步骤
输入图像转为灰度图像cvtColor
使用Canny进行边缘提取,得到二值图像
使用findContours寻找轮廓
使用drawContours绘制轮廓
#include 二十六、凸包-Convex Hull
26.1什么是凸包(Convex Hull)
什么是凸包(Convex Hull),在一个多变形边缘或者内部任 意两个点的连线都包含在多边形边界或者内部。
正式定义:
包含点集合S中所有点的最小凸多边形称为凸包
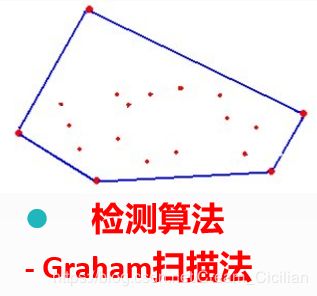
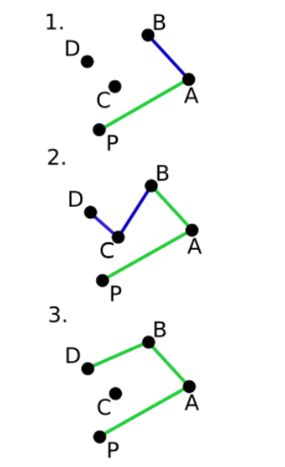
26.2概念介绍-Graham扫描算法
首先选择Y方向最低的点作为起始点p0
从p0开始极坐标扫描,依次添加p1….pn(排序顺序是根据极坐标的角度大小,逆时针方向)
对每个点pi来说,如果添加pi点到凸包中导致一个左转向(逆时针方法)则添加该点到凸包, 反之如果导致一个右转向(顺时针方向)删除该点从凸包中
26.3API说明cv::convexHull
convexHull(
InputArray points,// 输入候选点,来自findContours
OutputArray hull,// 凸包
bool clockwise,// default true, 顺时针方向
bool returnPoints)// true 表示返回点个数,如果第二个参数是 vector则自动忽略
26.4实现步骤
首先把图像从RGB转为灰度
然后再转为二值图像
在通过发现轮廓得到候选点
凸包API调用
绘制显示。
#include 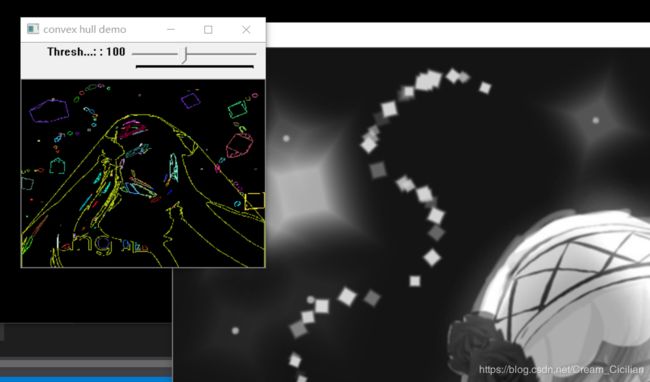
二十七、轮廓周围绘制矩形框和圆形框
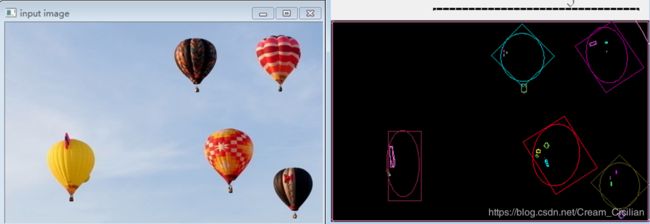
27.1轮廓周围绘制矩形 -API
approxPolyDP(InputArray curve, OutputArray approxCurve, double epsilon, bool closed)
基于RDP算法实现,目的是减少多边形轮廓点数
cv::boundingRect(InputArray points)得到轮廓周围最小矩形左上交点坐标和右下角点坐标,绘制一个矩形
cv::minAreaRect(InputArray points)得到一个旋转的矩形,返回旋转矩形
27.2轮廓周围绘制圆和椭圆-API
cv::minEnclosingCircle(InputArray points, //得到最小区域圆形
Point2f& center, // 圆心位置
float& radius)// 圆的半径
cv::fitEllipse(InputArray points)得到最小椭圆
27.3 实现步骤
首先将图像变为二值图像
发现轮廓,找到图像轮廓
通过相关API在轮廓点上找到最小包含矩形和圆,旋转矩形与椭圆。
绘制它们。
#include 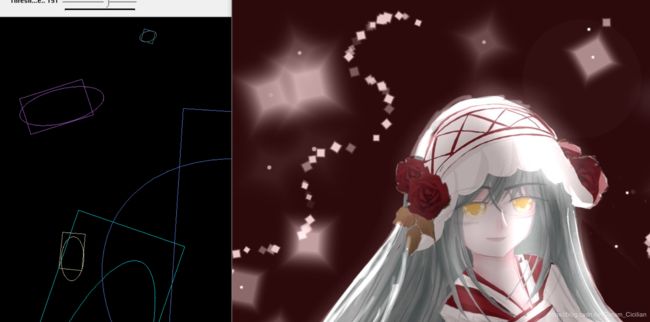
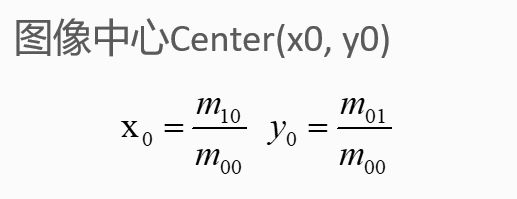
二十八、图像矩(Image Moments)
28.1矩的概念介绍
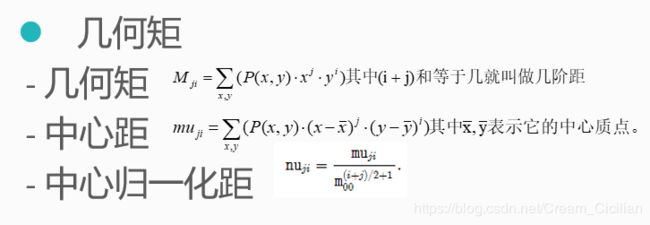
28.2API介绍与使用 – cv::moments 计算生成数据
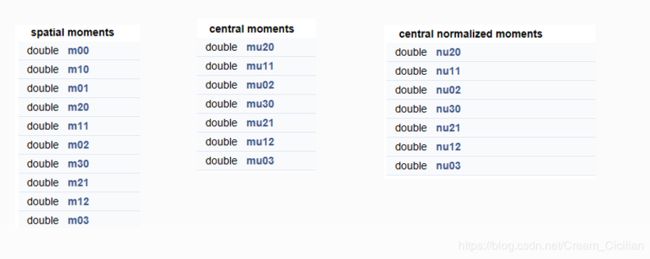
moments(
InputArray array,//输入数据
bool binaryImage=false // 是否为二值图像
)
contourArea(
InputArray contour,//输入轮廓数据
bool oriented// 默认false、返回绝对值)
arcLength(
InputArray curve,//输入曲线数据
bool closed// 是否是封闭曲线)
28.3实现步骤
提取图像边缘
发现轮廓
计算每个轮廓对象的矩
计算每个对象的中心、弧长、面积
#include 二十九、点多边形测试
29.1概念介绍 - 点多边形测试
测试一个点是否在给定的多边形内部,边缘或者外部
29.2API介绍 cv::pointPolygonTest
pointPolygonTest(
InputArray contour,// 输入的轮廓
Point2f pt, // 测试点
bool measureDist // 是否返回距离值,如果是false,1表示在内面,0表示在边界上,-1表示在外部,true返回实际距离
)
返回数据是double类型
29.3实现步骤
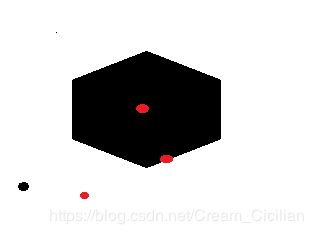
构建一张400x400大小的图片, Mat::Zero(400, 400, CV_8UC1)
画上一个六边形的闭合区域line
发现轮廓
对图像中所有像素点做点 多边形测试,得到距离,归一化后显示。
#include