目标识别—SSD网络详解
目标识别—SSD网络详解
网上的SSD解析大部分都只讲解到了Priorbox部分,最后的分类和回归并没有详细的讲解,并且论文里关于算法的一些细节也没有交代清楚。本篇文章将详细的从vgg16部分讲解到最后的识别部分。帮助大家更好的理解ssd网络,更好地进行迁移学习,以及网络优化。
论文地址:https://arxiv.org/abs/1512.02325
Ssd-caffe github :https://github.com/weiliu89/caffe/tree/ssd
Ssd-pytorch github :https://github.com/amdegroot/ssd.pytorch
Ssd-tensorflow github:https://github.com/balancap/SSD-Tensorflow
SSD网络算法原理:
part1:特征提取部分;
part2: priorbox选取;
part3: 分类和位置回归部分
Ssd结构图:
第一部分:vgg16特征提取:
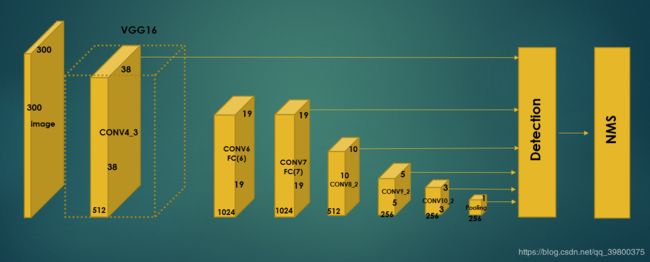
以VGG16为主的全卷积网络,用于输入图像的特征提取。SSD将VGG16最后两层FC修改成了两个卷积层(conv6,conv7)。并在之后又增加了6层卷积(conv8-1,conv8-2,conv9-1,conv9-2,conv10-1,conv10-2),最后一层使用Global Average Pool输出1x1x256的feature map。
全局平均池化就是对整个feature map 求均值,所以最后的feature map是1x1的大小。
第二部分:priorbox选取
Yolo1网络是只对最后一层的feature map 进行分类和位置回归,但ssd抽取了之前卷积层中的6层feature map 做分类和回归,最后将6层的输出concat在一起。
为什么这么做,熟悉特征提取算法的同学一定绕不开sift和surf两个经典的特征提取算法。
Sift特征提取最重要的作用之一就是实现了平移不变性和尺度不变性。
通过对原始图像高斯模糊,并构建了DOG空间。通过降采样建立了图像金字塔。
在金字塔的每层又设置不同的δ(δ为正态分布函数的标准差),得到不同尺度的高斯图像,模拟人眼对不同视野物体的实际观察效果。那么ssd同样是借鉴了这种方法。CONV4-3输出的是层级低的feature map,最后GAP输出的是层级高的feature map。
层级低的feature map模拟远而小的视野,层级高的feature map 模拟近而大的视野。
那么依据这个理论,ssd就可以识别出一张图片所有视野的物体,但实际上是这样的吗?
根据实际场景测试,ssd在识别小物体上仍然表现得较差,这是因为最后回归的bounding box与IoU(Intersection over Union ratio)得分有间接关系。
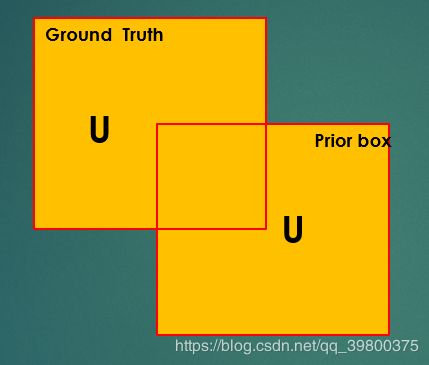
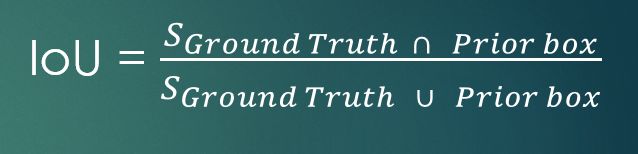
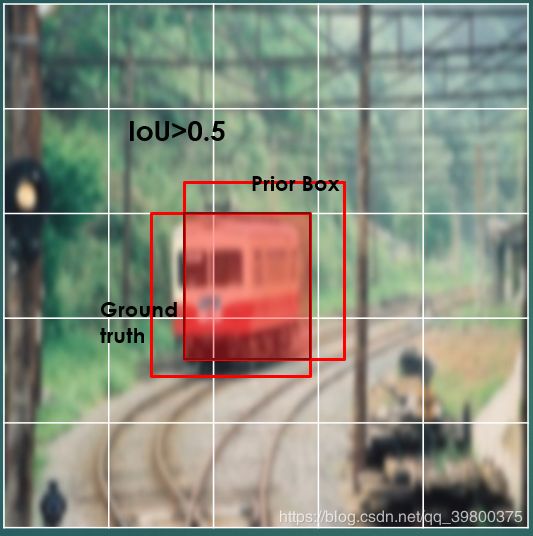
IoU(Intersection over Union ratio)实际上就是预测框和真实框面积的交集与并集的比值。我们认为只有IoU>0.5的priorbox才是有价值的。

下面看一组图:
原图

卷积后

9*9feature map
5*5feature map
2*2feature map
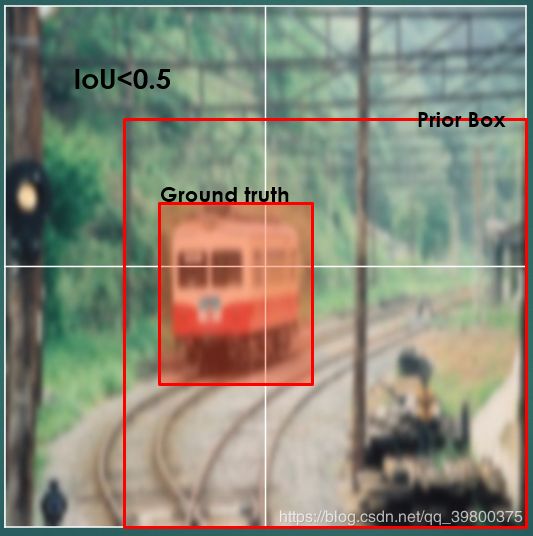
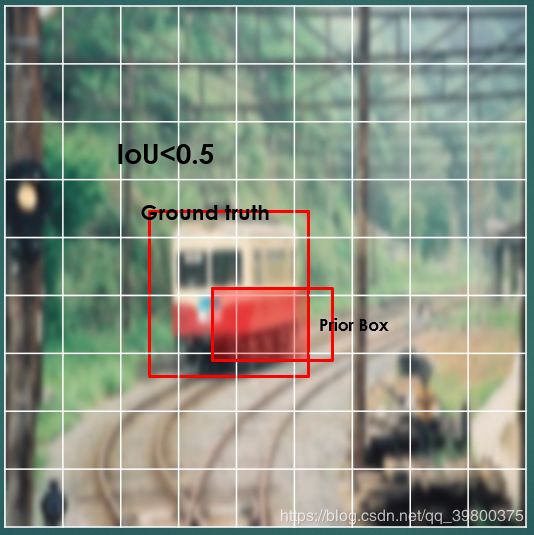
上图中较低层级和较高层级设置的Prior box计算出的IoU得分都较低,只有中间层级设置的Prior box计算出的IoU得分较高。所以,我们保留的Prior box大多数都集中在中间层级。
细心的同学可能发现,不同尺度的feature map ,相同参数的prior box框出原图的面积不一样。这是因为层级高的feature map尺寸要比层级低的feature map尺寸小,但它们都会映射回原图,所以在prior box面积不变的情况下,小尺寸的feature map被框出了大面积,大尺寸的feature map被框出了小面积。这也就是上文提到的“层级低的feature map识别远而小的视野,层级高的feature map 识别近而大的视野。”
Prior box的选取是借鉴了faster rcnn的anchor理念,主要包括Prior box的数量和尺寸两个方面。
数量方面:以conv4_3为例,conv4_3得到的feature map 尺寸是38x38,假设该层我们设置了3种aspect-ratio的Anchor,如(1:2,1:1 2:1),那么该层的Anchor数量就是38x38x(3+1)= 5776 。为什么加+1,下面讲。
尺寸方面:同样,以conv4_3为例,
conv4_3得到的feature map每个cell中心都至少两个正方形,和若干长方形。如下图:
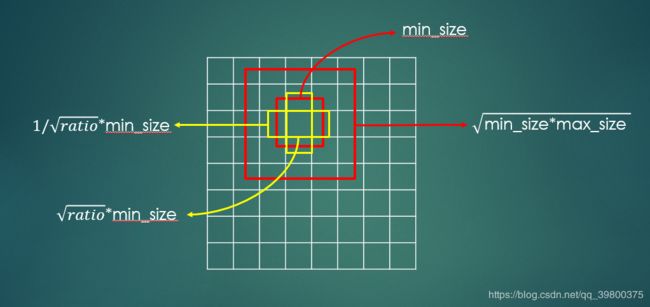
记小正方形的边长为min_size,大正方形的边长为![]()
长方形的长宽分别如图。min_size和max_size由以下公式计算:

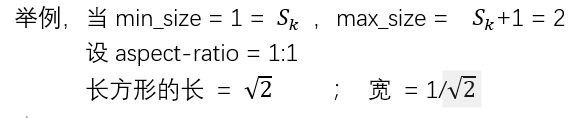
所以一个aspect-ratio对应一个矩形,上面假设该层有3种aspect-ratio,再加上边长为max_size的大正方形,那么就有38x38x(3+1)= 5776个prior_box。(与源码一致)
第三部分:预选框的处理,即类别分类和位置回归部分
很多文章对该部分的介绍很模糊而且不完整,这是因为论文原文对该部分的解释也很少。结合ssd的源码可以更加清晰地理解这一部分。
上面章节得到了6个feature map上的若干个prior box, 那么拿到这些预选框该怎么处理。
我们得到了预选框,按照正常思维,一定是要将预选框框出来的部分进行分类,并且回归出该框的具体位置(即框四个点的坐标或者原点坐标加宽高)。那么所有预选框都是良性的吗,一定不是,因为其中有大部分的都是背景或是IoU小于0.5的框,对最后的识别精度是消极的。
所以我们就需要筛掉这部分的框,只保留我们最想要的正确框。
现在就面临三个问题:1.将预选框里的内容分类;2.筛掉大部分消极框,只保留一小部分正确框。3.回归正确框的位置。
Ssd是这么做的:

还是以conv4_3为例,conv4_3得到的feature map经过L2-N(一种正则化方式,与BN有区别)和卷积,一路得到的feature map用于softmax分类,一路用于bounding box 回归。
需要注意的是,两路的feature map的shape是不同的。用于分类的feature map 的shape是[1,21xNum_priorbox,W,H]。其中21xNum_priorbox是该feature map的channels,21是类数,那么channels就等于21x5776=121296(与源码一致)。你可以这么简单理解,前21个channels包含了第一个priorbox的类别信息,即P(0-th)= 0.07,P(1-th)= 0.8,P(2-th) = 一直到P(20-th) = ,所有概率加起来等于1。以此类推,第二个priorbox,第三个priorbox……
位置回归用的是Smooth L1公式。用于位置回归的feature map的shape是[1,4xNum_priorbox,W,H],其中4xNum_priorbox是该feature map的channels,4是因为回归位置包含了(cx,cy,w,h)四个信息。那么你也可以这么简单理解,前4个channels包含了第一个priorbox的位置信息,以此类推,第二个priorbox,第三个priorbox……
Ssd是怎么筛掉大部分消极框,只保留一小部分正确框。
分析ssd的源码可以知道,Ssd是在做完了上述两个步骤后,用NMS(非极大值抑制)来保留正确框。我个人觉得这个步骤可以放在分类和位置回归之前,先筛掉一部分IoU<阈值的框,不一定是0.5,阈值可以设置的低一些,以防误筛。这样可以减少后面位置回归和分类的计算量,这也是ssd优化的一个方向。等计算完softmax和location regression之后,再做一次NMS。
Nms的算法原理核心就是topk问题,ssd源码用的是快排。这里不过多介绍排序部分。
其中softmax的两个公式这里不过多介绍。
其中Smooth L1的公式这里不过多介绍。
其中L2-Norm的公式这里不过多介绍。
最后用数学式子表示loss函数:

C – 置信度 l – 预测框 g – 真实框。α表示两者的权重,控制两者的贡献,设为1。