支持向量机(SVM)的约束和无约束优化、理论和实现
http://blog.itpub.net/29829936/viewspace-2636249/
2019-02-16 21:59:23

优化是机器学习领域最有趣的主题之一。我们日常生活中遇到的大多数问题都是通过数值优化方法解决的。在这篇文章中,让我们研究一些基本的数值优化算法,以找到任意给定函数(这对于凸函数最有效)的局部最优解。让我们从简单的凸函数开始,其中局部和全局最小值是相同的,然后转向具有多个局部和全局最小值的高度非线性函数。
整个优化围绕线性代数和微积分的基本概念展开。最近的深度学习更新引起了数值和随机优化算法领域的巨大兴趣,为深度学习网络所展示的惊人定性结果提供了理论支持。在这些类型的学习算法中,没有任何明确已知的优化函数,但我们只能访问0阶和1阶的Oracles。Oracles是在任何给定点返回函数值(0阶),梯度(1阶)或Hessian(2阶)的黑盒子。本本提供了对无约束和约束优化函数的基本理论和数值理解,还包括它们的python实现。
一个点成为局部最小值的必要和充分条件:
设f(.)是一个连续的二阶可微函数。对于任一点为极小值,它应满足以下条件:
![]()
- 一阶必要条件:
![]()
- 二阶必要条件:
![]()
- 二阶充足条件:
![]()
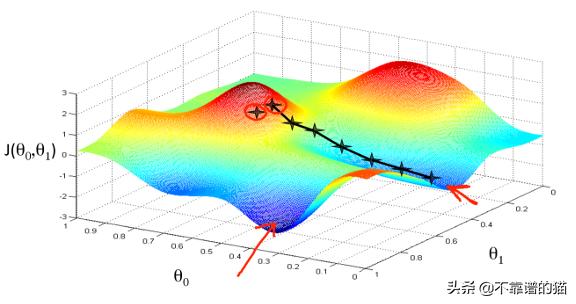
梯度下降:
梯度下降是学习算法(机器学习、深度学习或深度强化学习)领域所有进展的支柱。在这一节中,我们将看到为了更快更好的收敛,梯度下降的各种修改。让我们考虑线性回归的情况,我们估计方程的系数:
![]()
假设该函数是所有特征的线性组合。通过最小化损失函数来确定最佳系数集:

这是线性回归任务的最大似然估计。最小二乘法(Ordinary Least Square)涉及到求特征矩阵的逆,其表达式为:
![]()
对于实际问题,数据的维数很大,很容易造成计算量的激增。例如,让我们考虑问题的图像特征分析:一般图像的大小1024 x1024,这意味着特征的数量级为10⁶。由于具有大量的特征,这类优化问题只能通过迭代的方式来解决,这就导致了我们所熟知的梯度下降法和牛顿-拉弗森法。
梯度下降算法:
梯度下降算法利用先前指定的学习率(eta)在负梯度的方向(最陡的下降方向)上更新迭代(X)。学习率用于在任何给定的迭代中防止局部最小值的overshoot。
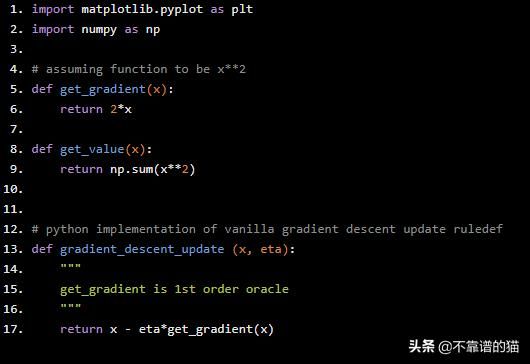
下图显示了函数f(x)=x²的梯度下降算法的收敛性,其中eta = 0.25

找出一个最优eta是目前的任务,这需要事先了解函数的理解和操作域。
import matplotlib.pyplot as plt import numpy as np # assuming function to be x**2 def get_gradient(x): return 2*x def get_value(x): return np.sum(x**2) # python implementation of vanilla gradient descent update ruledef def gradient_descent_update (x, eta): """ get_gradient is 1st order oracle """ return x - eta*get_gradient(x)
Armijo Goldstein条件梯度下降:
为了减少手动设置的工作,应用Armijo Goldstein (AG)条件来查找下一个迭代的(eta)。AG条件的形式推导需要线性逼近、Lipchitz条件和基本微积分的知识。
我们定义两个函数f1(x)和f2(x)作为两个不同系数和的f(x)的线性逼近,其具有两个不同的系数α和β,由下式给出:

在AG条件的每次迭代中,满足以下关系的特定eta:

找到并且相应地更新当前迭代。
下图显示了下一次迭代的范围,对于函数f(x)=x²的收敛,alpha = 0.25,beta = 0.5:

上图中红色、蓝色和绿色的线对应于绿色显示的下一个可能迭代的范围。
# python implementation of gradient descent with AG condition update rule def gradient_descent_update_AG(x, alpha =0.5, beta =0.25): eta =0.5 max_eta =np.inf min_eta =0. value = get_value(x) grad = get_gradient(x) while True : x_cand = x - (eta)*grad f = get_value(x_cand) f1 = value - eta *a lpha*np.sum(np.abs(grad)* *2 ) f2 = value - eta *be ta *np.sum(np.abs(grad)* *2 ) if f<=f2 and f>=f1: return x_cand if f <= f1: if eta == max_eta: eta = np.min([2.*eta, eta + max_eta/2.]) else: eta = np.min([2.*eta, (eta + max_eta)/2.]) if f>=f2: max_eta = eta eta = (eta+min_eta)/2.0

完全松弛条件的梯度下降:
在完全松弛条件的情况下,新的函数g(eta)被最小化以获得随后用于寻找下一次迭代的eta。

此方法涉及解决查找每个下一个迭代的优化问题,其执行方式如下:

# The python implementation for FR is shown below: def gradient_descent_update_FR (x): eta = 0.5 thresh = 1e-6 max_eta = np.inf min_eta = 0. while True : x_cand = x - eta*get_gradient(x) g_diff = -1. *get_gradient(x)*get_gradient(x_cand) if np.sum(np.abs(g_diff)) < thresh and eta > 0 : return x_cand if g_diff > 0: if eta == max_eta: eta = np.min([2.*eta, eta + max_eta/2.]) else: eta = np.min([2.*eta, (eta + max_eta)/2.]) else: max_eta = eta eta = (min_eta + eta)/2.0

随机梯度下降
我们知道,在实际设置中,数据的维数会非常大,这使得对所有特征进行进一步的梯度计算非常昂贵。在这种情况下,随机选择一批点(特征)并计算期望的梯度。整个过程的收敛只是在预期的意义上。
在数学上它意味着:随机选择一个点(p)来估计梯度。
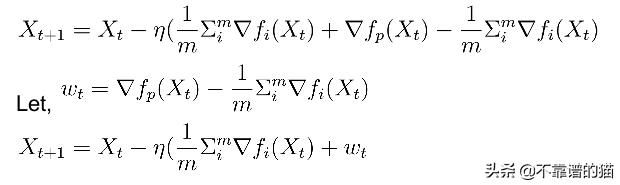
在上面的迭代中,wt可以被视为噪声。只有当E(wt)趋于0时,该迭代才会导致局部最优。

同样,可以看出wt的方差也是有限的。通过以上证明,保证了SGD的收敛性。
# SGD implementation in python
def SGD (self, X, Y, batch_size, thresh= 1 ):
loss = 100
step = 0
if self.plot: losses = []
while loss >= thresh:
# mini_batch formation
index = np.random.randint( 0 , len(X), size = batch_size)
trainX, trainY = np.array(X)[index], np.array(Y)[index]
self.forward(trainX)
loss = self.loss(trainY)
self.gradients(trainY)
# update
self.w0 -= np.squeeze(self.alpha*self.grad_w0)
self.weights -= np.squeeze(self.alpha*self.grad_w)
if self.plot: losses.append(loss)
if step % 1000 == 999 :
print "Batch number: {}" .format(step)+ " current loss: {}" .format(loss)
step += 1
if self.plot : self.visualization(X, Y, losses)
pass

AdaGrad
Adagrad是一个优化器,可帮助自动调整优化问题中涉及的每个特征的学习率。这是通过跟踪所有梯度的历史来实现的。该方法也仅在期望意义上收敛。
def AdaGrad (self, X, Y, batch_size,thresh=0.5 ,epsilon=1e-6 ):
loss = 100
step = 0
if self.plot: losses = []
G = np.zeros((X.shape[ 1 ], X.shape[ 1 ]))
G0 = 0
while loss >= thresh:
# mini_batch formation
index = np.random.randint( 0 , len(X), size = batch_size)
trainX, trainY = np.array(X)[index], np.array(Y)[index]
self.forward(trainX)
loss = self.loss(trainY)
self.gradients(trainY)
G += self.grad_w.T*self.grad_w
G0 += self.grad_w0** 2
den = np.sqrt(np.diag(G)+epsilon)
delta_w = self.alpha*self.grad_w / den
delta_w0 = self.alpha*self.grad_w0 / np.sqrt(G0 + epsilon)
# update parameters
self.w0 -= np.squeeze(delta_w0)
self.weights -= np.squeeze(delta_w)
if self.plot: losses.append(loss)
if step % 500 == 0 :
print "Batch number: {}".format (step)+ " current loss: {}".format(loss)
step += 1
if self.plot : self.visualization(X, Y, losses)
pass

让我们转向基于Hessian的方法,牛顿和拟牛顿方法:
基于hessian的方法是基于梯度的二阶优化方法,几何上涉及到梯度和曲率信息来更新权重,因此收敛速度比仅基于梯度的方法快得多,牛顿方法的更新规则定义为:

该算法的收敛速度远快于基于梯度的方法。数学上,梯度下降法的收敛速度正比于O (1 / t),而对于牛顿法它正比于O (1 / t²)。但是对于高维数据,为每个迭代估计二阶oracle的计算成本很高,这导致使用一阶oracle模拟二阶oracle。这就给出了拟牛顿算法。这类拟牛顿法中最常用的算法是BFGS和LMFGS算法。在这一节中,我们只讨论BFGS算法,它涉及到对函数Hessian的rank one矩阵更新。该方法的总体思想是随机初始化Hessian,并使用rank one更新规则在每次迭代中不断更新Hessian。数学上可以表示为:

# python implementation for BFGS def BFGS_update (H, s, y): smooth = 1e-3 s = np.expand_dims(s, axis= -1 ) y = np.expand_dims(y, axis= -1 ) rho = 1. /(s.T.dot(y) + smooth) p = (np.eye(H.shape[ 0 ]) - rho*s.dot(y.T)) return p.dot(H.dot(p.T)) + rho*s.dot(s.T) def quasi_Newton (x0, H0, num_iter= 100 , eta= 1 ): xo, H = x0, H0 for _ in range(num_iter): xn = xo - eta*H.dot(get_gradient(xo)) y = get_gradient(xn) - get_gradient(xo) s = xn - xo H = BFGS_update(H, s, y) xo = xn return xo

约束优化

现在,是时候讨论一些围绕约束优化(包括问题的制定和解决策略)的关键概念了。本节还将讨论一种称为SVM(支持向量机)的算法的理论和Python实现。当我们在现实生活中遇到问题时,提出一个理想的优化函数是相当困难的,有时是不可行的,所以我们通过对问题施加额外的约束来放松优化函数,优化这个约束设置将提供一个近似,我们将尽可能接近问题的实际解决方案,但也是可行的。求解约束优化问题的方法有拉格朗日公式法、惩罚法、投影梯度下降法、内点法等。在这一节中,我们将学习拉格朗日公式和投影梯度下降法。本节还将详细介绍用于优化CVXOPT的开源工具箱,并介绍使用此工具箱的SVM实现。
约束优化问题的一般形式:
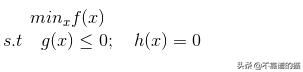
其中f(x)为目标函数,g(x)、h(x)分别为不等式约束和等式约束。如果f(x)是凸的约束条件形成一个凸集,(即g(x)为凸函数h(x)为仿射函数),该优化算法保证收敛于全局最小值。对于其他问题,它收敛于局部极小值。
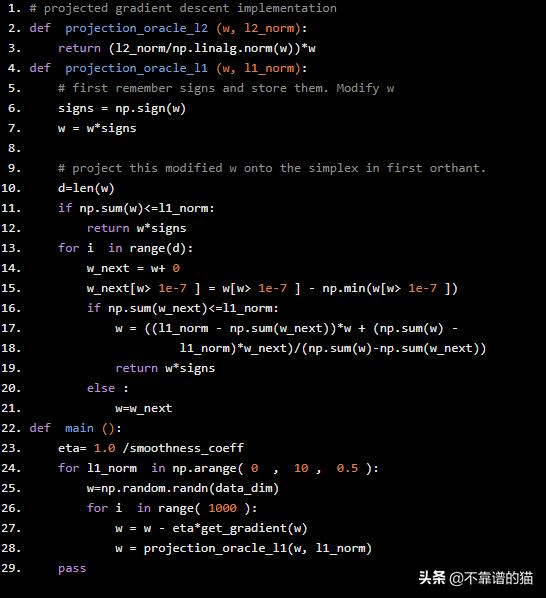
投影梯度下降
求解约束优化设置的第一步(也是最明显的一步)是对约束集进行迭代投影。这是求解约束优化问题中最强大的算法。这包括两个步骤(1)在最小化(下降)方向上找到下一个可能的迭代,(2)在约束集上找到迭代的投影。

# projected gradient descent implementation def projection_oracle_l2 (w, l2_norm): return (l2_norm/np.linalg.norm(w))*w def projection_oracle_l1 (w, l1_norm): # first remember signs and store them. Modify w signs = np.sign(w) w = w*signs # project this modified w onto the simplex in first orthant. d=len(w) if np.sum(w)<=l1_norm: return w*signs for i in range(d): w_next = w+ 0 w_next[w> 1e-7 ] = w[w> 1e-7 ] - np.min(w[w> 1e-7 ]) if np.sum(w_next)<=l1_norm: w = ((l1_norm - np.sum(w_next))*w + (np.sum(w) - l1_norm)*w_next)/(np.sum(w)-np.sum(w_next)) return w*signs else : w=w_next def main (): eta= 1.0 /smoothness_coeff for l1_norm in np.arange( 0 , 10 , 0.5 ): w=np.random.randn(data_dim) for i in range( 1000 ): w = w - eta*get_gradient(w) w = projection_oracle_l1(w, l1_norm) pass
了解拉格朗日公式
在大多数优化问题中,找到约束集上迭代的投影是一个困难的问题(特别是在复杂约束集的情况下)。它类似于在每次迭代中解决优化问题,在大多数情况下,优化问题是非凸的。在现实中,人们试图通过解决对偶问题而不是原始问题来摆脱约束。
在深入拉格朗日对偶和原始公式之前,让我们先了解一下KKT条件及其意义
- 对于任意点为具有等式约束的局部/全局最小值:

- 类似地,不等式约束:

这两个条件可以很容易地通过将单位圆看作一个约束集来观察。在第一部分中,我们只考虑一个(mu)符号不重要的边界,这是等式约束的结果。在第二种情况下,考虑一个单位圆的内部集合,其中-ve符号表示(lambda),表示可行解区域。
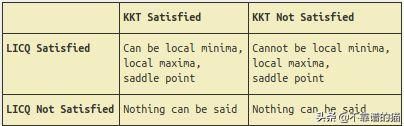
KKT (Karush-Kuhn-Tucker)条件被认为是一阶必要条件,当一个点被认为是一个平稳点(局部极小点、局部极大点、鞍点)时,该条件必须满足。x ^ * 是局部最小值:
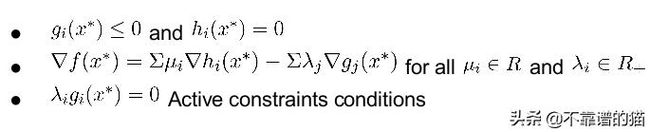
LICQ条件:所有活动约束

它们应该是线性无关的。
拉格朗日函数
对于任何函数f (x)与不等式约束g_i (x)≤0和等式约束h_i (x) = 0,拉格朗日L (x λμ)

优化函数:
以上优化相当于:

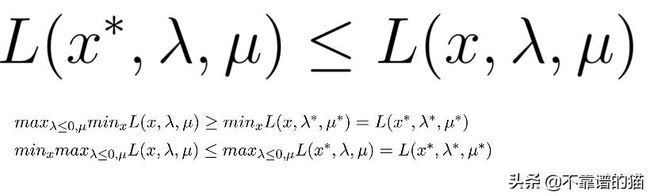
上面的公式被游戏理论的主张称为原始问题(p ^ *)(即第二个玩家将总是有更好的优化机会),可以很容易地看出:

这个公式被称为对偶问题(d ^ *)。
当且仅当目标函数为凸且约束集为凸时,原始公式和对偶公式的最优值相同。这项要求的证明理由如下:
函数是凸的,这意味着
SVM(支持向量机)

SVM属于用于分类和回归问题的监督机器学习算法类。SVM易于扩展,可以解决线性和非线性问题(通过使用基于核的技巧)。在大多数问题中,我们无法对两类不同的数据进行单独的区分,因此我们需要在决策边界的构建中提供一点余地,这很容易用SVM来表示。支持向量机的思想是在两组不同的数据点之间创建分离的超平面。一旦获得了分离超平面,对其中一个类中的数据点(测试用例)进行分类就变得相对容易了。支持向量机甚至可以很好地用于高维数据。与其他机器学习(ML)模型相比,svm的优点是内存效率高、准确、快速。我们来看看支持向量机的数学
SVM原始问题
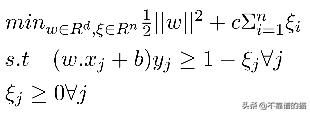
使用拉格朗日算法的SVM对偶问题

Derivation of Dual

CVXOPT
在本节中,我们将讨论使用CVXOPT库在python中实现上述SVM对偶算法。
CVXOPT通用格式的问题

# SVM using CVXOPT
import numpy as np
from cvxopt import matrix,solvers
def solve_SVM_dual_CVXOPT (x_train, y_train, x_test):
"""
Solves the SVM training optimisation problem (the Arguments:
x_train: A numpy array with shape (n,d), denoting R^d.
y_train: numpy array with shape (n,) Each element
x_train: A numpy array with shape (m,d), denoting dual) using cvxopt.
n training samples in takes +1 or -1
m test samples in R^d.
Limits:
n<200, d<100, m<1000
Returns:
y_pred_test : A numpy array with shape (m,). This is the result of running the learned model on the
test instances x_test. Each element is +1 or -1.
"""
n, d = x_train.shape
c = 10 # let max lambda value be 10
y_train = np.expand_dims(y_train, axis= 1 )* 1.
P = (y_train * x_train).dot((y_train * x_train).T)
q = -1. *np.ones((n, 1 ))
G = np.vstack((np.eye(n)* -1 ,np.eye(n)))
h = np.hstack((np.zeros(n), np.ones(n) * c))
A = y_train.reshape( 1 , -1 )
b = np.array([ 0.0 ])
P = matrix(P); q = matrix(q)
G = matrix(G); h = matrix(h)
A = matrix(A); b = matrix(b)
sol = solvers.qp(P, q, G, h, A, b)
lambdas = np.array(sol[ 'x' ])
w = ((y_train * lambdas).T.dot(x_train)).reshape( -1 , 1 )
b = y_train - np.dot(x_train, w)
prediction = lambda x, w, b: np.sign(np.sum(w.T.dot(x) + b))
y_test = np.array([prediction(x_, w, b) for x_ in x_test])
return y_test
if __name__ == "__main__" :
# Example format of input to the functions
n= 100
m= 100
d= 10
x_train = np.random.randn(n,d)
x_test = np.random.randn(m,d)
w = np.random.randn(d)
y_train = np.sign(np.dot(x_train, w))
y_test = np.sign(np.dot(x_test, w))
y_pred_test = solve_SVM_dual_CVXOPT(x_train, y_train, x_test)
check1 = np.sum(y_pred_test == y_test)
print ( "Score: {}/{}" .format(check1, len(y_Test)))
