KKT条件(Karush-Kuhn-Tucker Conditions)
Inttoduction
上一节我们提到了强对偶,即原问题的最优值与对偶问题的最优值相等。下面我们需要解决怎样找到优化问题的最优解。而KKT条件就是最优解需要满足的条件。
KKT条件
给定一个一般性的优化问题:
min x f ( x ) s u b j e c t t o h i ( x ) ≤ 0 , i = 1 , . . . , m l i ( x ) = 0 , j = 1 , . . . , r \begin{aligned} \min_{x}\quad &f(x)\\ {\rm subject\ to}\quad &h_i(x)\leq 0,\ i=1,...,m\\ &l_i(x)=0,\ j=1,...,r \end{aligned} xminsubject tof(x)hi(x)≤0, i=1,...,mli(x)=0, j=1,...,r
KKT条件(Karush-Kuhn-Tucker conditions or KKT conditions)定义为:
- 稳定性条件: 0 ∈ ∂ x ( f ( x ) + ∑ i = 1 m u i h i ( x ) + ∑ j = 1 r v j l j ( x ) ) 0\in\partial_x(f(x)+\sum^m_{i=1}u_ih_i(x)+\sum^r_{j=1}v_jl_j(x)) 0∈∂x(f(x)+i=1∑muihi(x)+j=1∑rvjlj(x))
- 互补松弛性: u i ⋅ h i ( x ) = 0 f o r a l l i u_i\cdot h_i(x)=0\quad {\rm for\ all}\ i ui⋅hi(x)=0for all i
- 原问题可行域: h i ( x ) ≤ 0 , l i ( x ) = 0 f o r a l l i , j h_i(x)\leq 0, l_i(x)=0\quad {\rm for\ all\ }i,j hi(x)≤0,li(x)=0for all i,j
- 对偶问题可行域: u i ≥ 0 f o r a l l i u_i\geq 0\quad {\rm for\ all\ } i ui≥0for all i
充分性与必要性说明
必要性
假设 x ∗ x^* x∗和 u ∗ , v ∗ u^*,v^* u∗,v∗分别是原问题和对偶问题的最优解,且原问题和对偶问题的对偶间隙为0(即强对偶)。那么:
f ( x ∗ ) = g ( u ∗ , v ∗ ) = min x f ( x ) + ∑ i = 1 m u i ∗ h i ( x ) + ∑ j = 1 r v j ∗ l j ( x ) ≤ f ( x ∗ ) + ∑ i = 1 m u i ∗ h i ( x ∗ ) + ∑ j = 1 r v j ∗ l j ( x ∗ ) ≤ f ( x ∗ ) \begin{aligned} f(x^*)&=g(u^*,v^*)\\ &=\min_x f(x)+\sum^m_{i=1}u^*_ih_i(x)+\sum^r_{j=1}v^*_jl_j(x)\\ &\leq f(x^*)+\sum^m_{i=1}u^*_ih_i(x^*)+\sum^r_{j=1}v^*_jl_j(x^*)\\ &\leq f(x^*) \end{aligned} f(x∗)=g(u∗,v∗)=xminf(x)+i=1∑mui∗hi(x)+j=1∑rvj∗lj(x)≤f(x∗)+i=1∑mui∗hi(x∗)+j=1∑rvj∗lj(x∗)≤f(x∗)
即所有不等式都可以取等号。因此,我们可以得到:
- 点 x ∗ x^* x∗最小化 L ( x , u ∗ , v ∗ ) L(x,u^*,v^*) L(x,u∗,v∗),那么 L ( x , u ∗ , v ∗ ) L(x,u^*,v^*) L(x,u∗,v∗)在 x = x ∗ x=x^* x=x∗处的次微分一定包含0——即稳定性条件。
- ∑ i = 1 m u i ∗ h i ( x ∗ ) = 0 \sum^m_{i=1}u^*_ih_i(x^*)=0 ∑i=1mui∗hi(x∗)=0——即互补松弛性
必要性:如果 x ∗ x^* x∗和 u ∗ , v ∗ u^*,v^* u∗,v∗分别是原问题与对偶问题的解,且对偶间隙为0,那么 x ∗ , u ∗ , v ∗ x^*,u^*,v^* x∗,u∗,v∗满足KKT条件。
充分性
如果存在 x ∗ , u ∗ , v ∗ x^*,u^*,v^* x∗,u∗,v∗满足KKT条件,那么
g ( u ∗ , v ∗ ) = f ( x ∗ ) + ∑ i = 1 m u i ∗ h i ( x ∗ ) + ∑ j = 1 r v j ∗ l j ( x ∗ ) = f ( x ∗ ) \begin{aligned} g(u^*,v^*)&=f(x^*)+\sum^m_{i=1}u^*_ih_i(x^*)+\sum^r_{j=1}v^*_jl_j(x^*)\\ &= f(x^*) \end{aligned} g(u∗,v∗)=f(x∗)+i=1∑mui∗hi(x∗)+j=1∑rvj∗lj(x∗)=f(x∗)
因此,对偶间隙为0,所以 x ∗ x^* x∗和 u ∗ , v ∗ u^*,v^* u∗,v∗分别是原问题与对偶问题的解。
充分性:如果 x ∗ , u ∗ , v ∗ x^*,u^*,v^* x∗,u∗,v∗满足KKT条件,那么 x ∗ x^* x∗和 u ∗ , v ∗ u^*,v^* u∗,v∗分别是原问题与对偶问题的解
总结
综上所述,KKT条件等价于对偶间隙为0:
- 总是充分的
- 在强对偶条件下是必要的
那么我们可以得到:如果一个问题有强对偶性,那么 x ∗ , u ∗ , v ∗ x^*,u^*,v^* x∗,u∗,v∗满足KKT条件与 x ∗ x^* x∗和 u ∗ , v ∗ u^*,v^* u∗,v∗分别是原问题与对偶问题的解是等价的。
可以看出,对于无约束优化问题,KKT条件就是次梯度最优化条件。对于一般性凸优化问题,KKT条件是次梯度最优化条件的推广。
例子:支持向量机(SVM)
给定 y ∈ { − 1 , 1 } n y\in \{-1,1\}^n y∈{−1,1}n, X ∈ R n × p X\in R^{n\times p} X∈Rn×p有行向量 x 1 , . . . , x n x_1,...,x_n x1,...,xn,则支持向量机(SVM)定义为:
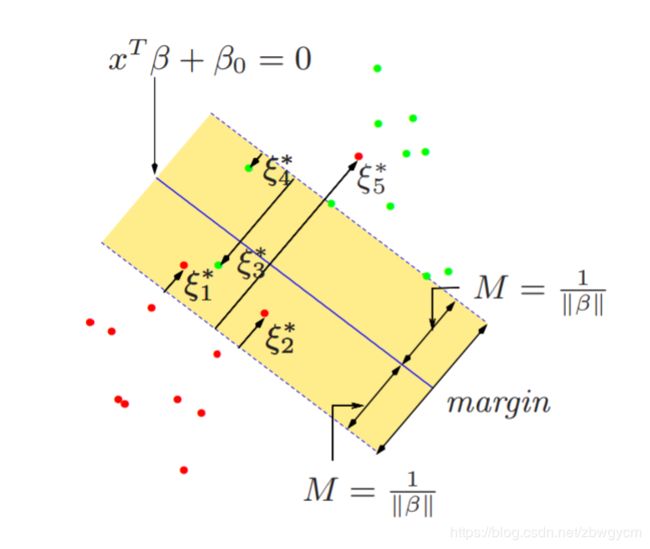
min β , β 0 , ξ 1 2 ∥ β ∥ 2 2 + C ∑ i = 1 n ξ i s u b j e c t t o ξ i ≥ 0 , i = 1 , . . . , n y i ( x i T β + β 0 ) ≥ 1 − ξ i , i = 1 , . . . , n \begin{aligned} \min_{\beta,\beta_0,\xi}\quad &\frac{1}{2}\|\beta\|^2_2+C\sum^n_{i=1}\xi_i\\ {\rm subject\ to}\quad & \xi_i\geq 0,\ i=1,...,n\\ &y_i(x_i^T\beta + \beta_0) \geq1-\xi_i,\ i=1,...,n \end{aligned} β,β0,ξminsubject to21∥β∥22+Ci=1∑nξiξi≥0, i=1,...,nyi(xiTβ+β0)≥1−ξi, i=1,...,n
引入对偶变量 v , w ≥ 0 v,w\geq 0 v,w≥0。KKT稳定性条件为:
0 = ∑ i = 1 n w i y i , β = ∑ i = 1 n w i y i x i , w = C 1 − v 0=\sum^n_{i=1}w_iy_i,\quad \beta=\sum^n_{i=1}w_iy_ix_i, \quad w=C1-v 0=i=1∑nwiyi,β=i=1∑nwiyixi,w=C1−v
互补松弛性:
v i ξ i = 0 , w i ( 1 − ξ i − y i ( x i T β + β 0 ) ) = 0 , i = 1 , . . . , n v_i\xi_i=0,\quad w_i(1-\xi_i-y_i(x^T_i\beta+\beta_0))=0,\quad i=1,...,n viξi=0,wi(1−ξi−yi(xiTβ+β0))=0,i=1,...,n
因此,在最优点处我们有 β = ∑ i = 1 n w i y i x i \beta=\sum^n_{i=1}w_iy_ix_i β=∑i=1nwiyixi,且仅当 y i ( x i T β + β 0 ) = 1 − ξ i y_i(x_i^T\beta + \beta_0) =1-\xi_i yi(xiTβ+β0)=1−ξi, w i w_i wi是非零的,这些点 i i i被叫做支持点(support points)
- 对于支持点 i i i,如果 ξ i = 0 \xi_i=0 ξi=0,则 x i x_i xi位于分割边界上,且 w i ∈ ( 0 , C ] w_i\in (0,C] wi∈(0,C];
- 对于支持点 i i i,如果 ξ i ≠ 0 \xi_i\neq0 ξi=0,则 x i x_i xi位于分割边界的错误一边,且 w i = C w_i= C wi=C;
有约束形式与拉格朗日形式
在统计和机器学习中,我们常常把一个优化问题在其有约束形式(constrained form),即
min x f ( x ) s u b j e c t t o h ( x ) ≤ t \min_x f(x)\quad {\rm subject\ to\quad }h(x)\leq t xminf(x)subject toh(x)≤t
和拉格朗日形式(Lagrange form),即
min x f ( x ) + λ ⋅ h ( x ) \min_x f(x)+\lambda\cdot h(x) xminf(x)+λ⋅h(x)
之间进行互换,并认为这两种形式是等价的。由上面分析可知,假如 f , h f,h f,h都是凸函数,这种等价在 h ( x ) < t h(x)
Conclusion
对偶的一个关键性质是,在强对偶条件下,KKT条件是最优解的充要条件,即原问题的解可以通过其对偶问题得到。由于对偶问题一定是凸优化问题,这在对偶问题比原问题更简单时非常有用。