cbam block and senet block
其实就是在 图像宽高上面重要性 图像宽高求要平均 最大 然后 相加 求sigmoid
然后 接着在 通道上面求重要性 通道数上面分别求平均 和 最大 然后相加 求sigmoid
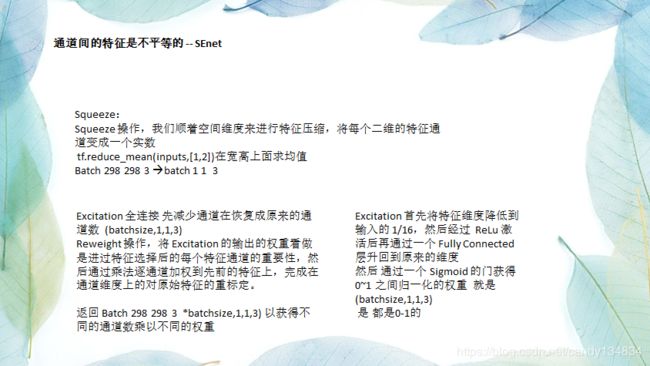
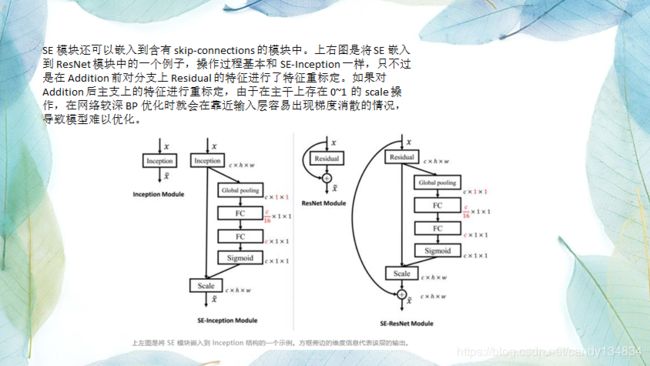
senet 其实就是通道的重要性不同 ,感觉cbam和senet是不是有些相似
def cbam_block(input_feature, name, ratio=8):
"""Contains the implementation of Convolutional Block Attention Module(CBAM) block.
As described in https://arxiv.org/abs/1807.06521.
"""
with tf.variable_scope(name):
attention_feature = channel_attention(input_feature, 'ch_at', ratio) # input (2, 35, 35, 384) # attention_feature(2, 35, 35, 384)
attention_feature = spatial_attention(attention_feature, 'sp_at')# attention_feature (2, 35, 35, 384)
return attention_feature
def channel_attention(input_feature, name, ratio=8):
kernel_initializer = tf.contrib.layers.variance_scaling_initializer()
bias_initializer = tf.constant_initializer(value=0.0)
with tf.variable_scope(name):
channel = input_feature.get_shape()[-1] # input_feature (2, 35, 35, 384) channel 384
avg_pool = tf.reduce_mean(input_feature, axis=[1,2], keepdims=True) # =(2, 1, 1, 384)
assert avg_pool.get_shape()[1:] == (1,1,channel)
avg_pool = tf.layers.dense(inputs=avg_pool,
units=channel//ratio, #units 48 ratio 8
activation=tf.nn.relu,
kernel_initializer=kernel_initializer,
bias_initializer=bias_initializer,
name='mlp_0',
reuse=None)
assert avg_pool.get_shape()[1:] == (1,1,channel//ratio)
avg_pool = tf.layers.dense(inputs=avg_pool,
units=channel,
kernel_initializer=kernel_initializer,
bias_initializer=bias_initializer,
name='mlp_1',
reuse=None)
assert avg_pool.get_shape()[1:] == (1,1,channel) #avg_pool (2, 1, 1, 384)
max_pool = tf.reduce_max(input_feature, axis=[1,2], keepdims=True) #(2, 1, 1, 384)
assert max_pool.get_shape()[1:] == (1,1,channel)
max_pool = tf.layers.dense(inputs=max_pool,
units=channel//ratio,
activation=tf.nn.relu,
name='mlp_0',
reuse=True) #max_pool shape=(2, 1, 1, 48)
assert max_pool.get_shape()[1:] == (1,1,channel//ratio)
max_pool = tf.layers.dense(inputs=max_pool,
units=channel,
name='mlp_1',
reuse=True) # max_pool (2, 1, 1, 384)
assert max_pool.get_shape()[1:] == (1,1,channel)
scale = tf.sigmoid(avg_pool + max_pool, 'sigmoid') #池化相加sigmoid
return input_feature * scale # 其实就是 图像的每个通道*不同的比重
def spatial_attention(input_feature, name): # input_feature shape=(2, 35, 35, 384)
kernel_size = 7
kernel_initializer = tf.contrib.layers.variance_scaling_initializer()
with tf.variable_scope(name):
avg_pool = tf.reduce_mean(input_feature, axis=[3], keepdims=True) # avg_pool =(2, 35, 35, 1) 在通道上求平均和最大
assert avg_pool.get_shape()[-1] == 1
max_pool = tf.reduce_max(input_feature, axis=[3], keepdims=True) # max_pool shape=(2, 35, 35, 1)
assert max_pool.get_shape()[-1] == 1
concat = tf.concat([avg_pool,max_pool], 3) # concat (2, 35, 35, 2)
assert concat.get_shape()[-1] == 2
concat = tf.layers.conv2d(concat,
filters=1,
kernel_size=[kernel_size,kernel_size],
strides=[1,1],
padding="same",
activation=None,
kernel_initializer=kernel_initializer,
use_bias=False,
name='conv')
assert concat.get_shape()[-1] == 1 #cpncat (2, 35, 35, 1)
concat = tf.sigmoid(concat, 'sigmoid') # (2, 35, 35, 1)
return input_feature * concat # (2, 35, 35, 384) # 就是图片的每个维度 的图片都乘以 (35,35)仔细琢磨一下