二阶微分方程解法总结 Summary of Second Order Equations
文章目录
- Second Order Equations
- Definitions
- Second-Order Differential Equation
- Solution
- Linear Equations
- Existence and Uniqueness
- Structure of General Solutions
- Linear Combination
- Linear Independent
- General Solution
- Wronskian
- Use Wronskian to Check Linear Dependency
- Second-Order Equations and Systems
- General Solutions to Linear, Homogeneous Equations with Constant Coefficients
- Inhomogeneous Equations
- General solution to inhomogeneous equation
- The Method of Undetermined Coefficients
- 特殊情况
- The Method of Variation of Parameters
- Harmonic Motion
- Unforced Harmonic Motion
- Simple harmonic motion
- Damped Harmonic Motion
- Forced Harmonic Motion
- Forced Undamped Harmonic Motion
- Forced Damped Harmonic Motion
Second Order Equations
Definitions
Second-Order Differential Equation
y ′ ′ = f ( t , y , y ′ ) y'' = f(t,y,y') y′′=f(t,y,y′)
Solution
y ′ ′ ( t ) = f ( t , y ( t ) , y ′ ( t ) ) y''(t) = f(t,y(t),y'(t)) y′′(t)=f(t,y(t),y′(t))
Linear Equations
y ′ ′ + p ( t ) y ′ + q ( t ) y = g ( t ) y'' + p(t)y' + q(t)y = g(t) y′′+p(t)y′+q(t)y=g(t)
Where coefficients p, q, and g can be arbitrary functions of independent variable t, but y, y’, and y’’ must all be first order.
g(t) is called forcing term.
If g(t) = 0, the equation is said to be homogeneous:
y ′ ′ + p ( t ) y ′ + q ( t ) y = 0 y''+p(t)y'+q(t)y=0 y′′+p(t)y′+q(t)y=0
Existence and Uniqueness
Suppose the functions p(t), q(t), and g(t) are continuous on the interval ( α , β ) (\alpha, \beta) (α,β). Let t 0 t_0 t0 be any point in ( α , β ) (\alpha, \beta) (α,β). Then for any real numbers y 0 y_0 y0 and y 1 y_1 y1 there is one and only one function y ( t ) y(t) y(t) defined on ( α , β ) (\alpha, \beta) (α,β), which is a solution to
y ′ ′ + p ( t ) y ′ + q ( t ) y = g ( t ) f o r α < t < β y''+p(t)y'+q(t)y=g(t) \quad for \ \alpha \lt t \lt \beta y′′+p(t)y′+q(t)y=g(t)for α<t<β
and y ( t ) y(t) y(t) satisfies the initial conditions
y ( t 0 ) = y 0 y ′ ( t 0 ) = y 1 y(t_0)=y_0 \\ y'(t_0)=y_1 y(t0)=y0y′(t0)=y1
Structure of General Solutions
Suppose that y 1 y_1 y1 and y 2 y_2 y2 are both solutions to the homogeneous, linear equation
y ′ ′ + p ( t ) y ′ + q ( t ) y = 0. y''+p(t)y'+q(t)y=0. y′′+p(t)y′+q(t)y=0.
Then the function
y = C 1 y 1 + C 2 y 2 y=C_1y_1+C_2y_2 y=C1y1+C2y2
is also a solution.
Linear Combination
A linear combination of the two functions u u u and v v v is any function of the form
w = A u + B v , w=Au+Bv, w=Au+Bv,
where A A A and B B B are constants.
Linear Independent
Two functions u and v are said to be linearly independent on the interval ( α , β ) (\alpha, \beta) (α,β) if neither is a constant multiple of the other on that interval. If one is a constant multiple of the other on ( α , β ) (\alpha, \beta) (α,β) they are said to be linearly dependent there.
General Solution
Suppose that y 1 y_1 y1 and y 2 y_2 y2 are linearly independent solutions to the homogeneous, linear equation
y ′ ′ + p ( t ) y ′ + q ( t ) y = 0. y''+p(t)y'+q(t)y=0. y′′+p(t)y′+q(t)y=0.
Then the general solution is
y = C 1 y 1 + C 2 y 2 , y=C_1y_1+C_2y_2, y=C1y1+C2y2,
where C 1 C_1 C1 and C 2 C_2 C2 are arbitrary constants.
y 1 y_1 y1 and y 2 y_2 y2 form a fundamental set of solutions.
Wronskian
The Wronskian of two functions u u u and v v v is defined to be
KaTeX parse error: Undefined control sequence: \matrix at position 16: W(t)=det\left(\̲m̲a̲t̲r̲i̲x̲{u(t) & v(t)\\ …
Suppose the functions u u u and v v v are sulutions to the linear, homogeneous equation
y ′ ′ + p ( t ) y ′ + q ( t ) y = 0 y''+p(t)y'+q(t)y=0 y′′+p(t)y′+q(t)y=0
in the interval ( α , β ) (\alpha, \beta) (α,β). Then the Wronskian of u u u and v v v is either identically equal to zero on ( α , β ) (\alpha, \beta) (α,β) or it is never equal to zero there.
Use Wronskian to Check Linear Dependency
Suppose the functions u u u and v v v are solutions to the linear, homogeneous equation
y ′ ′ + p ( t ) y ′ + q ( t ) y = 0 y''+p(t)y'+q(t)y=0 y′′+p(t)y′+q(t)y=0
in the interval ( α , β ) (\alpha, \beta) (α,β). Then u u u and v v v are linearly dependent if and only if their Wronskian is identically zero in ( α , β ) (\alpha, \beta) (α,β).
If W ( t 0 ) ≠ 0 W(t_0)\neq 0 W(t0)=0 for some t 0 t_0 t0 in the interval ( α , β ) (\alpha, \beta) (α,β), then u and v are linearly independent in ( α , β ) (\alpha, \beta) (α,β). On the other hand, if u and v are linearly independent in ( α , β ) (\alpha, \beta) (α,β), then W ( t ) W(t) W(t) never vanishes in ( α , β ) (\alpha, \beta) (α,β)
Second-Order Equations and Systems
这一节就是想说明一阶方程和更高阶方程之间的关系
A planner system of first-order equation is a set of two first-order differential equations involving two unknown functions. It might be written as
x ′ = f ( t , x , y ) y ′ = g ( t , x , y ) , x'=f(t,x,y)\\ y'=g(t,x,y), x′=f(t,x,y)y′=g(t,x,y),
where f f f and g g g are functions of the independent variable t t t and the two unknowns x x x and y y y.
二阶方程 y ′ ′ = F ( t , y , y ′ ) y''=F(t,y,y') y′′=F(t,y,y′)可以写成以下一阶系统:
y ′ = v v ′ = F ( t , y , v ) y' = v\\ v' = F(t,y,v) y′=vv′=F(t,y,v)
如果y是二阶方程的一个解,那么y和v就是上面一阶系统的解
The yv-plan is called the phase plane.

Plotting y and v versus t is the composite plot.

General Solutions to Linear, Homogeneous Equations with Constant Coefficients
Characteristic Equation for a differential equation y ′ ′ + p y ′ + q y = 0 y''+py'+qy=0 y′′+py′+qy=0 is
λ 2 + p λ + q = 0. \lambda^2+p\lambda + q=0. λ2+pλ+q=0.
The polynomial λ 2 + p λ + q \lambda^2+p\lambda + q λ2+pλ+q is called the characteristic polynomial for the equation. The root(s) of the characteristic equation is called characteristic root.
There are three cases:
-
p 2 − 4 q > 0 p^2-4q \gt 0 p2−4q>0, the characteristic equation has two distinct, real roots λ 1 \lambda_1 λ1 and λ 2 \lambda_2 λ2. A fundamental set of solutions is
y 1 ( t ) = e λ 1 t a n d y 2 ( t ) = e λ 2 t y_1(t)=e^{\lambda_1 t} \quad and \quad y_2(t)=e^{\lambda_2 t} y1(t)=eλ1tandy2(t)=eλ2t -
p 2 − 4 q = 0 p^2-4q = 0 p2−4q=0, one repeated real root λ \lambda λ. Fundamental set of solutions:
y 1 ( t ) = e λ t a n d y 2 ( t ) = t e λ t y_1(t)=e^{\lambda t} \quad and \quad y_2(t)=te^{\lambda t} y1(t)=eλtandy2(t)=teλt -
p 2 − 4 q < 0 p^2-4q \lt 0 p2−4q<0, two complex conjugate roots a ± i b a \pm ib a±ib. Fundamental set of solutions:
y 1 ( t ) = e a t cos ( b t ) a n d y 2 ( t ) = e a t sin ( b t ) y_1(t)=e^{at}\cos(bt) \quad and \quad y_2(t)=e^{at}\sin(bt) y1(t)=eatcos(bt)andy2(t)=eatsin(bt)
Inhomogeneous Equations
y ′ ′ + p y ′ + q y = f y''+py'+qy = f y′′+py′+qy=f
where p = p ( t ) p=p(t) p=p(t), q = q ( t ) q=q(t) q=q(t), and f = f ( t ) f=f(t) f=f(t) are functions of the independent variable t t t. f f f is called the inhomogeneous term, or the forcing term.
General solution to inhomogeneous equation
Suppose that y p y_p yp is a particular solution to the inhomogeneous equation, and that y 1 y_1 y1 and y 2 y_2 y2 form a fundamental set of solutions to the associated homogeneous equation y ′ ′ + p y ′ + q y = 0 y''+py'+qy=0 y′′+py′+qy=0.
Then the general solution to the inhomogeneous equation is given by
y = y p + C 1 y 1 + C 2 y 2 , y = y_p + C_1 y_1 + C_2 y_2, y=yp+C1y1+C2y2,
where C 1 C_1 C1 and C 2 C_2 C2 are arbitrary constants.
The general solution can also be written as
y = y p + y h y=y_p + y_h y=yp+yh
where y h = C 1 y 1 + C 2 y 2 y_h = C_1 y_1 + C_2 y_2 yh=C1y1+C2y2
The Method of Undetermined Coefficients
y ′ ′ + p y ′ + q y = f y''+py'+qy=f y′′+py′+qy=f
where p p p and q q q are constants.
因为通解的形式是 y = y p + y h y=y_p + y_h y=yp+yh,而我们之前已经知道了 y h y_h yh的解法,所以现在只要找到一个特解 y p y_p yp就行。怎么找,看 f ( t ) f(t) f(t)的形式,然后用待定系数法解出p和q。

特殊情况
f ( t ) f(t) f(t)本身就是齐次方程(homogeneous equation)的解,直接用上面的trial solution就可能导致方程两边不相等。这时候,就在trial solution基础上再乘上t,不行的就再乘t… 例如尝试的trial solution是 a e r t ae^{rt} aert,带入方程后造成两边不相等,那就尝试 a t e r t ate^{rt} atert,如果还不行,再试 a t 2 e r t at^2e^{rt} at2ert。
The Method of Variation of Parameters
y ′ ′ + p y ′ + q y = f y''+py'+qy = f y′′+py′+qy=f
-
Find a fundamental set of solutions y 1 y_1 y1, y 2 y_2 y2 to the associated homogeneous equation y ′ ′ + p y ′ + q y = 0 y''+py'+qy=0 y′′+py′+qy=0
-
Form y p = v 1 y 1 + v 2 y 2 y_p=v_1 y_1 + v_2 y_2 yp=v1y1+v2y2, where v 1 v_1 v1 and v 2 v_2 v2 are functions to be determined.
-
Find v 1 v_1 v1 and v 2 v_2 v2 by solving the equations and integrating:
v 1 ′ y 1 + v 2 ′ y 2 = 0 v 1 ′ y 1 ′ + v 2 ′ y 2 ′ = f ( t ) v_1' y_1 + v_2' y_2 = 0\\ v_1' y_1' + v_2' y_2' = f(t) v1′y1+v2′y2=0v1′y1′+v2′y2′=f(t) -
Substitute v 1 v_1 v1 and v 2 v_2 v2 into y p = v 1 y 1 + v 2 y 2 y_p=v_1 y_1 + v_2 y_2 yp=v1y1+v2y2
Harmonic Motion
The equation for the motion of a vibrating spring is
m y ′ ′ + μ y ′ + k y = F ( t ) , my'' + \mu y' + ky = F(t), my′′+μy′+ky=F(t),
where m m m is mass, μ \mu μ is damping constant, and k k k is spring constant, F(t) is the external force.
Rewrite the equation as
d 2 y d t 2 + μ m d y d t + k m y = 1 m F ( t ) , \frac{d^2 y}{dt^2} + \frac{\mu}{m} \frac{dy}{dt} + \frac{k}{m} y = \frac{1}{m} F(t), dt2d2y+mμdtdy+mky=m1F(t),
and make c = μ 2 m c = \frac{\mu}{2m} c=2mμ, ω 0 = k m \omega_0 = \sqrt{\frac{k}{m}} ω0=mk, f ( t ) = F ( t ) m f(t)=\frac{F(t)}{m} f(t)=mF(t), and x = y x=y x=y, we get the equation
x ′ ′ + 2 c x ′ + ω 0 2 x = f ( t ) . x'' + 2cx' + \omega_0^2 x = f(t). x′′+2cx′+ω02x=f(t).
We refer to this equation as the equation for harmonic motion. c c c is called damping constant, and f f f is the forcing term.
Unforced Harmonic Motion
x ′ ′ + 2 c x ′ + ω 0 2 x = 0 x'' + 2cx' + \omega_0^2 x = 0 x′′+2cx′+ω02x=0
where c ≥ 0 c \ge 0 c≥0 and ω 0 > 0 \omega_0 \gt 0 ω0>0 are constants.
Simple harmonic motion
When there is no damping, that is, c = 0 c=0 c=0
x ′ ′ + ω 0 2 x = 0. x'' + \omega_0^2 x = 0. x′′+ω02x=0.
The general solution is
x ( t ) = a cos ( ω 0 t ) + b sin ( ω 0 t ) , x(t) = a\cos(\omega_0 t)+b\sin(\omega_0 t), x(t)=acos(ω0t)+bsin(ω0t),
where a and b are constants.
ω 0 \omega_0 ω0 is called the natural frequency.
Periodicity
T = 2 π ω 0 T = \frac{2\pi}{\omega_0} T=ω02π
The general solution to simple harmonic motion can be written as
x ( t ) = A cos ( ω 0 t − ϕ ) x(t) = A\cos(\omega_0 t - \phi) x(t)=Acos(ω0t−ϕ)
where A is the amplitude, ϕ \phi ϕ is the phase
A = a 2 + b 2 tan ϕ = b a A = \sqrt{a^2 + b^2} \\ \tan\phi = \frac{b}{a} A=a2+b2tanϕ=ab
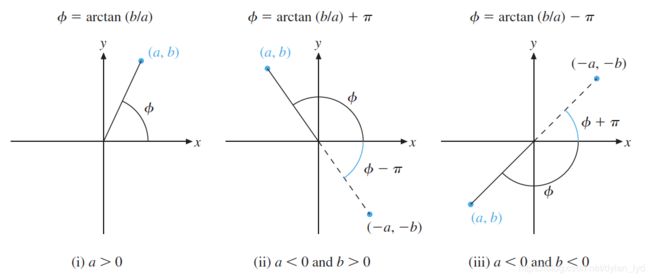
To solve for ϕ \phi ϕ, we take a r c t a n ( b a ) arctan(\frac{b}{a}) arctan(ab), but it takes value between − π / 2 -\pi/2 −π/2 and π / 2 \pi/2 π/2, while ϕ \phi ϕ can be from − π -\pi −π to π \pi π. Therefore, we take
ϕ = { arctan ( b / a ) , i f a > 0 ; arctan ( b / a ) + π , i f a < 0 a n d b > 0 ; arctan ( b / a ) − π , i f a < 0 a n d b < 0. \phi = \left\{ \begin{matrix} \arctan(b/a), & if\ a>0; \\ \arctan(b/a)+\pi, & if\ a<0\ and\ b>0; \\ \arctan(b/a)-\pi, & if\ a<0\ and\ b<0. \end{matrix} \right. ϕ=⎩⎨⎧arctan(b/a),arctan(b/a)+π,arctan(b/a)−π,if a>0;if a<0 and b>0;if a<0 and b<0.
Damped Harmonic Motion
Now c > 0 c>0 c>0,
x ′ ′ + 2 c x ′ + ω 0 2 x = 0. x'' + 2cx' + \omega_0^2 x = 0. x′′+2cx′+ω02x=0.
The characteristic equation
λ 2 + 2 c λ + ω 0 2 = 0 \lambda^2 + 2c\lambda + \omega_0^2 = 0 λ2+2cλ+ω02=0
has roots
λ 1 = − c − c 2 − ω 0 2 a n d λ 2 = − c + c 2 − ω 0 2 . \lambda_1 = -c-\sqrt{c^2-\omega_0^2}\quad and\quad \lambda_2 = -c+\sqrt{c^2-\omega_0^2}. λ1=−c−c2−ω02andλ2=−c+c2−ω02.
There are three cases for the sign of c 2 − ω 0 2 c^2-\omega_0^2 c2−ω02, and thus for the general solution:
-
Underdamped ( c 2 − ω 0 2 < 0 c^2-\omega_0^2 < 0 c2−ω02<0, that is, c < ω 0 c < \omega_0 c<ω0)
x ( t ) = e − c t [ C 1 cos ( ω t ) + C 2 sin ( ω t ) ] , x(t) = e^{-ct}[C_1\cos(\omega t)+C_2\sin(\omega t)], x(t)=e−ct[C1cos(ωt)+C2sin(ωt)],
where ω = ω 0 2 − c 2 \omega = \sqrt{\omega_0^2 - c^2} ω=ω02−c2 -
Overdamped ( c 2 − ω 0 2 > 0 c^2-\omega_0^2 > 0 c2−ω02>0, that is, c > ω 0 c > \omega_0 c>ω0)
x ( t ) = C 1 e λ 1 t + C 2 e λ 2 t x(t) = C_1 e^{\lambda_1 t} + C_2 e^{\lambda_2 t} x(t)=C1eλ1t+C2eλ2t
where λ 1 < λ 2 < 0 \lambda_1 < \lambda_2 < 0 λ1<λ2<0 -
Critically damped ( c 2 − ω 0 2 = 0 c^2-\omega_0^2 = 0 c2−ω02=0, that is, c = ω 0 c = \omega_0 c=ω0, λ = − c \lambda = -c λ=−c)
x ( t ) = C 1 e − c t + C 2 t e − c t x(t) = C_1 e^{-ct} + C_2 te^{-ct} x(t)=C1e−ct+C2te−ct
Forced Harmonic Motion
x ′ ′ + 2 c x ′ + ω 0 2 x = A cos ( ω t ) x''+2cx'+\omega_0^2 x = A\cos(\omega t) x′′+2cx′+ω02x=Acos(ωt)
where A A A is the amplitude of the driving force, and ω \omega ω is the driving frequency
Forced Undamped Harmonic Motion
x ′ ′ + ω 0 2 x = A cos ( ω t ) x''+\omega_0^2 x = A\cos(\omega t) x′′+ω02x=Acos(ωt)
The associated homogeneous equation is
x ′ ′ + ω 0 2 x = 0 x''+\omega_0^2x = 0 x′′+ω02x=0
with general solution
x h = C 1 cos ( ω 0 t ) + C 2 sin ( ω 0 t ) x_h = C_1\cos(\omega_0 t) + C_2\sin(\omega_0 t) xh=C1cos(ω0t)+C2sin(ω0t)
There are two cases for the driving frequency ω \omega ω:
-
ω ≠ ω 0 \omega \ne \omega_0 ω=ω0, that is, the driving frequency is not equal to the natural freq
The equation becomes x ′ ′ + ω 0 2 x = A cos ( ω 0 t ) x''+\omega_0^2 x = A\cos(\omega_0 t) x′′+ω02x=Acos(ω0t)
Using undetermined coefficient method, x p = a cos ( ω t ) + b sin ( ω t ) x_p=a\cos(\omega t)+b\sin(\omega t) xp=acos(ωt)+bsin(ωt)
We get
a = A ω 0 2 − ω 2 a n d b = 0. a = \frac{A}{\omega_0^2 - \omega^2} \quad and \quad b=0. a=ω02−ω2Aandb=0.
The particular solution is
x p ( t ) = A ω 0 2 − ω cos ( ω t ) x_p(t) = \frac{A}{\omega_0^2 - \omega}\cos(\omega t) xp(t)=ω02−ωAcos(ωt) -
ω = ω 0 \omega = \omega_0 ω=ω0
In this case, x p = a c o s ( ω 0 t ) + b s i n ( ω 0 t ) x_p=a\ cos(\omega_0 t)+b\ sin(\omega_0 t) xp=a cos(ω0t)+b sin(ω0t) is the solution of homogeneous equation x h = C 1 c o s ( ω 0 t ) + C 2 s i n ( ω 0 t ) x_h = C_1cos(\omega_0 t) + C_2sin(\omega_0 t) xh=C1cos(ω0t)+C2sin(ω0t). Therefore, we look for a particular solution
x p = t ( a cos ( ω 0 t ) + b sin ( ω 0 t ) ) . x_p = t(a\cos(\omega_0 t) + b\sin(\omega_0 t)). xp=t(acos(ω0t)+bsin(ω0t)).
We get
b = A 2 ω 0 a n d a = 0. b = \frac{A}{2\omega_0} \quad and \quad a = 0. b=2ω0Aanda=0.
The particular solution is
x p = A 2 ω 0 t sin ( ω 0 t ) . x_p = \frac{A}{2\omega_0}t\sin (\omega_0 t). xp=2ω0Atsin(ω0t).
As t t t increases, x p x_p xp grows larger.This case is called resonance.
Forced Damped Harmonic Motion
x ′ ′ + 2 c x ′ + ω 0 2 x = A cos ( ω t ) x''+2cx'+\omega_0^2 x = A\cos(\omega t) x′′+2cx′+ω02x=Acos(ωt)
The associated homogeneous equation:
x ′ ′ + 2 c x ′ + ω 0 2 x = 0 x'' + 2cx' + \omega_0^2 x = 0 x′′+2cx′+ω02x=0
The characteristic roots are
λ = − c ± c 2 − ω 0 2 \lambda = -c \pm \sqrt{c^2 - \omega_0^2} λ=−c±c2−ω02
和unforced的时候一样,有三种情况。但是homogeneous equation的通解 x h x_h xh是一样的,不一样的是特解 x p x_p xp.
对于Underdamped情况,即 c < ω 0 c<\omega_0 c<ω0,
x ( t ) = e − c t [ C 1 cos ( η t ) + C 2 sin ( η t ) ] , x(t) = e^{-ct}[C_1\cos(\eta t)+C_2\sin(\eta t)], x(t)=e−ct[C1cos(ηt)+C2sin(ηt)],
where
η = ω 0 2 − c 2 . \eta = \sqrt{\omega_0^2 - c^2}. η=ω02−c2.
就这里与之前unforced不一样,之前用的是 ω \omega ω表示 η \eta η,但是因为在forced这里已经表示了driving frequency,所以只能换成另外的字母表示,即 η \eta η。
特解还是用待定系数法,通过一系列地计算我们可以得到
x p = G ( ω ) A cos ( ω t − ϕ ) . x_p = G(\omega)A\cos(\omega t-\phi). xp=G(ω)Acos(ωt−ϕ).
where
G ( ω ) = 1 R G(\omega) = \frac{1}{R} G(ω)=R1
R cos ϕ = ω 0 2 − ω 2 a n d R sin ϕ = 2 c ω R = ( ω 0 2 − ω ) 2 + 4 c 2 ω 2 R\cos\phi = \omega_0^2 - \omega^2 \quad and \quad R\sin\phi=2c\omega \\ R = \sqrt{(\omega_0^2-\omega)^2 + 4c^2\omega^2} Rcosϕ=ω02−ω2andRsinϕ=2cωR=(ω02−ω)2+4c2ω2
cos ϕ = ω 0 2 − ω 2 ( ω 0 2 − ω 2 ) 2 + 4 c 2 ω 2 sin ϕ = 2 c ω ( ω 0 2 − ω 2 ) 2 + 4 c 2 ω 2 \cos\phi=\frac{\omega_0^2 - \omega^2}{\sqrt{(\omega_0^2 - \omega^2)^2 + 4c^2\omega^2}} \quad \sin\phi = \frac{2c\omega}{\sqrt{(\omega_0^2 - \omega^2)^2 + 4c^2\omega^2}} cosϕ=(ω02−ω2)2+4c2ω2ω02−ω2sinϕ=(ω02−ω2)2+4c2ω22cω
c o t ϕ = ω 0 2 − ω 2 2 c ω cot\phi = \frac{\omega_0^2 - \omega^2}{2c\omega} cotϕ=2cωω02−ω2