树莓派-Linux-内核驱动编译
写好驱动代码
pin4module.c
#include 测试代码(上层代码)
pin4test.c
#include 将驱动代码拷贝到当前路径如下
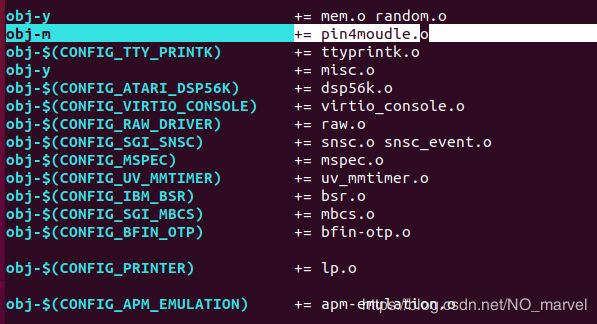
然后修改当前路径的Makefile
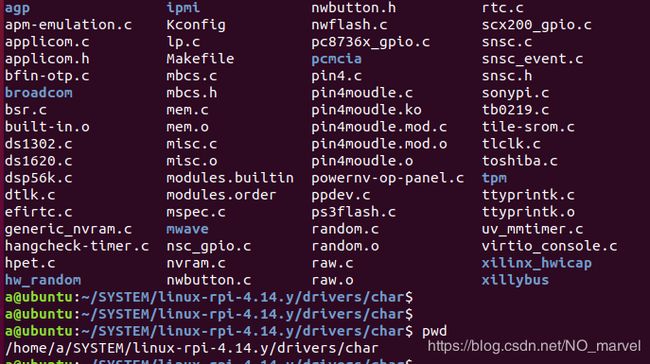
然后在Linux源码的目录结构下输入如下指令来生成目标驱动 如图

ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- KERNEL=kernel7 make modules
生成目标文件pin4moudle.ko 以 .ko 结尾的文件
然后编译测试代码

arm-linux-gnueabihf-gcc pin4.c -o pin4test
将生成的驱动文件 和 测试文件 用scp xxx [email protected]:/home/pi
拷贝到树莓派下面。
在树莓派上使用如下指令 将目标驱动加载到内核当中
sudo insmod pin4moudle.ko
lsmod 查看当前驱动
rmmod xxx 删除当前驱动
之后会生成如图所示的结果

然后用指令 sudo chmod 666 /dev/pin4 给生成的目标文件赋予所有人都可读可写的权限。
然后运行测试文件 ./pin4test 的到如图的结果