算法笔记---问题 A: 关键路径
题目描述
图的连接边上的数据表示其权值,带权值的图称作网。
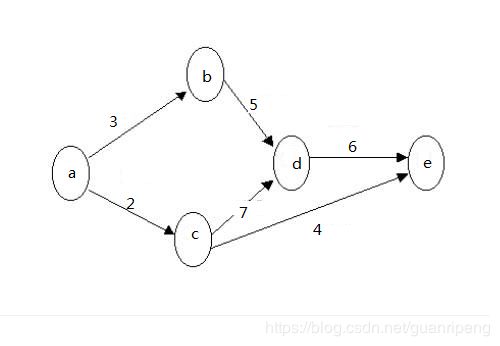
图可描述为顶点集为(a,b,c,d,e)
边集及其权值为(始点,终点 权值):
a b 3
a c 2
b d 5
c d 7
c e 4
d e 6
网的源点是入度为0的顶点,汇点是出度为0的顶点。网的关键路径是指从源点到汇点的所有路径中,具有最大路径长度的路径。上图中的关键路径为a->c->d->e,其权值之和为关键路径的长度为15。
本题的要求是根据给出的网的邻接矩阵求该网的关键路径及其长度。
输入:
第一行输入一个正整数n(1<=n<=5),其代表测试数据数目,即图的数目
第二行输入x(1<=x<=15)代表顶点个数,y(1<=y<=19)代表边的条数
第三行给出图中的顶点集,共x个小写字母表示顶点
接下来每行给出一条边的始点和终点及其权值,用空格相隔,每行代表一条边。
输出:
第一个输出是图的关键路径(用给出的字母表示顶点, 用括号将边括起来,顶点逗号相隔)
第二个输出是关键路径的长度
每个矩阵对应上面两个输出,两个输出在同一行用空格间隔,每个矩阵的输出占一行。
样例:
输入:
2
5 6
abcde
a b 3
a c 2
b d 5
c d 7
c e 4
d e 6
4 5
abcd
a b 2
a c 3
a d 4
b d 1
c d 3
输出:
(a,c) (c,d) (d,e) 15
(a,c) (c,d) 6
解题思路:
求关键路径的题一般都是有向无环图,且都是AOE(Activity On Edge)网
即图中的顶点表示事件,图中的边表示活动。
关键路径共有四部分需要求出来:
1、事件的最早发生时间
2、事件的最晚发生时间
3、活动的最早开始时间
4、活动的最晚开始时间
1、事件最早发生的时间,是从前往后顺序计算,取最大值
即ve[v] = max{ve[top] + weight}
2、求出事件的最迟发生时间,是从后往前顺序计算,取最小值
vl[top] = min{vl[v] - weight}
3、活动的最早开始时间 = 事件的最早发生时间
4、活动的最晚开始时间 = 事件的最晚发生时间 - 该活动所需时间
5、判断活动的最早开始时间和最晚开始时间是否一样,两个时间相同则表示该活动为关键路径上的活动。
下图为王道考研2020的知识点:
注意:
该题在输出关键路径的时候,需要找出图中的源点,不然可能不会通过测试数据。
下面为AC代码:
/*
* @Description: 关键路径
*/
#include