ibeacon UWB GPS 空间四点定位算法
最近在研究uwb空间四点的精准定位,其实是基于RSSI原理的,蓝牙IBEACON,GPS也差不多基于这个原理
三维空间的四点定位算法:
已知四个基站点的坐标(x1,y1,z1)(x2,y2,z2)(x3,y3,z3)(x4,y4,z4)和到未知点(x,y,z)的距离R1,R2,R3,R4
所以四点定位使用矩阵求解方程的方式:
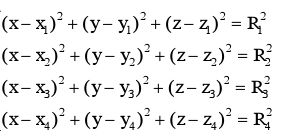
其中要求的点的坐标是(x,y,z),已知的四个探针的位置为(x1,y1,z1),(x2,y2,z2),(x3,y3,z3),(x4,y4,z4),r1到r4为所求的点到四个探针的距离。
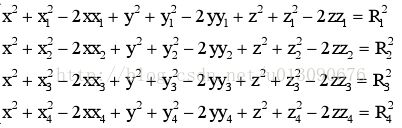
现在我们的任务就是求解上述方程,首先分解:
然后相减:

其中:

这时候就可以转换为矩阵相乘:
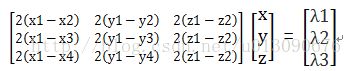
假设上面矩阵为A*B=C,那么此时只需要求解A的逆矩阵,然后把逆矩阵同时乘以等式两边,就可以求得x,y,z了。
具体求解逆矩阵的方法为高斯-约旦消元法
高斯-约旦消元法原理
假设 AX=E ,其中, A 为 n 阶系数矩阵(与上面的解线性方程组对照);E 为单位矩阵,即
,其中
为单位列向量; X 为 n 个列向量构成的矩阵,即
,其中
为列向量。于是,可以把等式 AX=E 看成是求解 n 个线性方程组
,求出了所有的
之后,也即得到了矩阵 X。而由 AX=E 可知,矩阵 X 是 A 的逆矩阵,即
。这样,就求出了 A 的逆矩阵了。于是,求逆矩阵的过程被化成了解线性方程组的过程,因此我们可以用 Gauss-Jordan 消元法来求逆矩阵。求逆矩阵时,系数矩阵 A 和单位矩阵 E 可以共用一块存储区,在每一次约化过程中,系数矩阵逐渐被其逆矩阵替代。
示例
有如下的方程组:
显而易见,该方程组对应的系数矩阵 A 和右端向量矩阵 B(此处只有一个右端向量)分别为:
其实在求逆矩阵的过程中,矩阵 B 无关紧要,可以忽略,不过此处还是把它写出来了。下面,把单位矩阵 E 附在 A 的右边,构成另一个矩阵(A|E):
下面,通过矩阵的初等变换,将 A 化为单位矩阵 E,而 E 则化为了 A 的逆矩阵。以下是转化步骤:
(1)主元选为 3,所以将 Row1 (第一行)与 Row2 (第二行)交换:
(2)主元所在行的所有元素除以主元:
(3)Row1 – Row2 ,Row3 – 2 × Row2 :
现在,原来的矩阵 A 有一列被化为了单位阵的形式。
(4)重新选主元,这一次主元选为 5/3,于是 Row1 ÷ 5/3 (主元所在行的所有元素除以主元):
(5)Row2 – (1/3) × Row1 ,Row3 – (4/3) × Row1 :
现在,原来的矩阵 A 又有一列被化为了单位阵的形式。
(6)重新选主元,这一次主元选为 -1/5 ,于是 Row3 ÷ (-1/5) (主元所在行的所有元素除以主元):
(7)Row1 – (2/5) × Row3 ,Row2 – (1/5) × Row3 :
现在,原来的矩阵 A 的所有列都被化为了单位阵的形式。可见,以上过程非常适合于计算机编程求解。至此,我们完成了从 A 到 E 的转换,这个过程中使用了选主元的方法,但没有使用列交换。于是,原来的单位矩阵 E 就变成了
,即:

关键部分的C++代码:
/**
* G-J消元法求矩阵逆矩阵
*
* @param
* @return 一个矩阵对象,为当前的矩阵的逆矩阵
*/
Matrix Matrix::inverseGJ(){
int i,j,k;
int dimension = row;
Matrix output(row,col);
//将输出矩阵初始化为单位矩阵
output.eye();
for(i=0;i
for(j=0;i
if(pmm[j*col+i]!=0)
{
swap(0,j);
output.swap(0,j);
break;
}
}
for(j=0;j
if(j==0) //如果是第一行,将input[j][i]设置为1,其他元素均除以input[i][i]
{
for(k=dimension-1;k>=0;--k)
output.setElement(j,k,output.getElement(j,k)/pmm[j*col+i]);
for(k=dimension-1;k>=i;--k)
pmm[j*col+k]/=pmm[j*col+i];
}
else //如果不是第一行,将每一行的input[j][i]设置为0,该行其他元素都要倍数的减去第一行对应位置上的值
{
for(k=dimension-1;k>=0;--k)
output.setElement(j,k,output.getElement(j,k)-pmm[j*col+i]/pmm[i]*output.getElement(0,k));
for(k=dimension-1;k>=i;--k)
pmm[j*col+k]=pmm[j*col+k]-pmm[j*col+i]/pmm[i]*pmm[k];
}
}
swap(0,(i+1)%dimension); //每次都将下一次需要处理的行和当前的第一行交换
output.swap(0,(i+1)%dimension);
}
output.reorder(); //因为之前的交换操作,行顺序乱了,需要重新排列一下,即把第一行的数据放到最后一行后面
return output;
}
具体C++代码请加微信: