Pytroch入坑 4. Centerloss+Mnist+可视化
0.前言
对于分类问题,常见的损失函数是Softmax,许多研究人员在损失函数的调整上下功夫,详见
https://blog.csdn.net/sinat_37787331/article/details/80156308
本次实现pytroch +centlerloss+mnist
参考:https://github.com/UpCoder/centerloss
https://github.com/CharlesNord/centerloss
1.代码
# coding: utf8
import torch
from torch.autograd import Variable
class CenterLoss(torch.nn.Module):
def __init__(self, num_classes, feat_dim, loss_weight=1.0):
super(CenterLoss, self).__init__()
self.num_classes = num_classes
self.feat_dim = feat_dim
self.loss_weight = loss_weight
self.centers = torch.nn.Parameter(torch.randn(num_classes, feat_dim))
self.use_cuda = False
def forward(self, y, feat):
if self.use_cuda:
hist = Variable(
torch.histc(y.cpu().data.float(), bins=self.num_classes, min=0, max=self.num_classes) + 1).cuda()
else:
hist = Variable(torch.histc(y.data.float(), bins=self.num_classes, min=0, max=self.num_classes) + 1)
centers_count = hist.index_select(0, y.long()) # 计算每个类别对应的数目
batch_size = feat.size()[0]
feat = feat.view(batch_size, 1, 1, -1).squeeze()
if feat.size()[1] != self.feat_dim:
raise ValueError("Center's dim: {0} should be equal to input feature's dim: {1}".format(self.feat_dim,
feat.size()[1]))
centers_pred = self.centers.index_select(0, y.long())
diff = feat-centers_pred
loss = self.loss_weight * 1/2.0 * (diff.pow(2).sum(1) / centers_count).sum()
return loss
def cuda(self, device_id=None):
self.use_cuda = True
return self._apply(lambda t: t.cuda(device_id))import torch
from torch.autograd import Variable
import torch.utils.data as Data
import torchvision
from torchvision import transforms
import torch.nn.functional as F
import matplotlib.pyplot as plt
import seaborn as sns
import numpy as np
import matplotlib.patheffects as PathEffects
from centerLoss import CenterLoss
import torch.optim.lr_scheduler as lr_scheduler
import matplotlib.cm as cm
trainset = torchvision.datasets.MNIST(root='../data', train=True, transform=transforms.Compose(
[transforms.ToTensor(), transforms.Normalize((0.1307,), (0.3081,))]
))
testset = torchvision.datasets.MNIST(root='../data', train=False, transform=transforms.Compose(
[transforms.ToTensor(), transforms.Normalize((0.1307,), (0.3081,))]
))
train_loader = Data.DataLoader(dataset=trainset, batch_size=128, shuffle=True, num_workers=4)
test_loader = Data.DataLoader(dataset=testset, batch_size=128, shuffle=True, num_workers=4)
class Net(torch.nn.Module):
def __init__(self):
super(Net, self).__init__()
self.extract = torch.nn.Sequential(
torch.nn.Linear(784, 512),
torch.nn.PReLU(),
torch.nn.Linear(512, 256),
torch.nn.PReLU(),
torch.nn.Linear(256, 128),
torch.nn.PReLU(),
torch.nn.Linear(128, 64),
torch.nn.PReLU(),
torch.nn.Linear(64, 32),
torch.nn.PReLU(),
torch.nn.Linear(32, 2),
)
self.predict = torch.nn.Sequential(
torch.nn.PReLU(),
torch.nn.Linear(2, 10),
)
def forward(self, x):
feature = self.extract(x.view(-1, 784))
pred = F.log_softmax(self.predict(feature))
return feature, pred
class ConvNet(torch.nn.Module):
def __init__(self):
super(ConvNet, self).__init__()
self.extract = torch.nn.Sequential(
torch.nn.Conv2d(1, 32, kernel_size=5, padding=2),
torch.nn.PReLU(),
torch.nn.Conv2d(32, 32, kernel_size=5, padding=2),
torch.nn.PReLU(),
torch.nn.MaxPool2d(2, 2),
torch.nn.Conv2d(32, 64, kernel_size=5, padding=2),
torch.nn.PReLU(),
torch.nn.Conv2d(64, 64, kernel_size=5, padding=2),
torch.nn.PReLU(),
torch.nn.MaxPool2d(2, 2),
torch.nn.Conv2d(64, 128, kernel_size=5, padding=2),
torch.nn.PReLU(),
torch.nn.Conv2d(128, 128, kernel_size=5, padding=2),
torch.nn.PReLU(),
torch.nn.MaxPool2d(2, 2),
)
self.feat = torch.nn.Linear(128*3*3, 2)
self.pred = torch.nn.Sequential(
torch.nn.Linear(2, 10)
)
def forward(self, x):
x = self.extract(x)
x = x.view(-1, 128*3*3)
feat = self.feat(x)
pred = F.log_softmax(self.pred(feat))
return feat, pred
model = Net().cuda()
# model = ConvNet().cuda()
optimizer4nn = torch.optim.SGD(model.parameters(), lr=1e-3, momentum=0.9, weight_decay=0.0005)
scheduler = lr_scheduler.StepLR(optimizer4nn, 20, gamma=0.8)
centerloss = CenterLoss(10, 2, 0.1).cuda()
nllloss = torch.nn.NLLLoss().cuda()
#crossentropy = torch.nn.CrossEntropyLoss().cuda()
optimizer4center = torch.optim.SGD(centerloss.parameters(), lr=0.5)
def train(train_loader, model, epoch):
print("Training Epoch: {}".format(epoch))
model.train()
for step, (data, target) in enumerate(train_loader):
data = Variable(data).cuda()
target = Variable(target).cuda()
feat, pred = model(data)
loss = nllloss(pred, target) + centerloss(target, feat)
optimizer4nn.zero_grad()
optimizer4center.zero_grad()
loss.backward()
optimizer4nn.step()
optimizer4center.step()
if step % 100 == 0:
print("Epoch: {} step: {}".format(epoch, step))
def test(test_loader, model, epoch):
print("Predicting Epoch: {}".format(epoch))
model.eval()
total_pred_label = []
total_target = []
total_feature = []
for step, (data, target) in enumerate(test_loader):
data = Variable(data).cuda()
target = Variable(target).cuda()
feature, pred = model(data)
_, pred_label = pred.max(dim=1)
total_pred_label.append(pred_label.data.cpu())
total_target.append(target.data.cpu())
total_feature.append(feature.data.cpu())
total_pred_label = torch.cat(total_pred_label, dim=0)
total_target = torch.cat(total_target, dim=0)
total_feature = torch.cat(total_feature, dim=0)
precision = torch.sum(total_pred_label == total_target) / float(total_target.shape[0])
print("Validation accuracy: {}%".format(precision * 100))
scatter(total_feature.numpy(), total_target.numpy(), epoch)
def scatter(feat, label, epoch):
plt.ion()
plt.clf()
palette = np.array(sns.color_palette('hls', 10))
ax = plt.subplot(aspect='equal')
# sc = ax.scatter(feat[:, 0], feat[:, 1], lw=0, s=40, c=palette[label.astype(np.int)])
for i in range(10):
plt.plot(feat[label == i, 0], feat[label == i, 1], '.', c=palette[i])
plt.legend(['0', '1', '2', '3', '4', '5', '6', '7', '8', '9'], loc='upper right')
ax.axis('tight')
for i in range(10):
xtext, ytext = np.median(feat[label == i, :], axis=0)
txt = ax.text(xtext, ytext, str(i), fontsize=18)
txt.set_path_effects([PathEffects.Stroke(linewidth=5, foreground="w"), PathEffects.Normal()])
plt.draw()
plt.savefig('./benchmark/centerloss_{}.png'.format(epoch))
plt.pause(0.001)
for epoch in range(50):
scheduler.step()
train(train_loader, model, epoch)
test(test_loader, model, epoch)2.效果
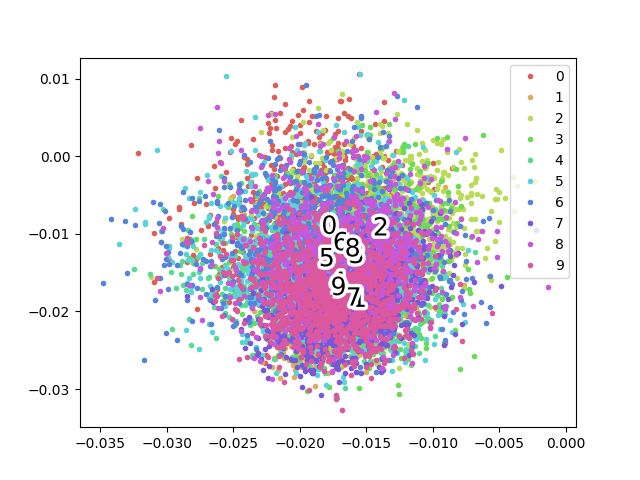
第一个epoch ,acc 9%. 第14个epoch 91%。 第50个epoch acc 96.79%。 网络用的是很简单的网络。
效果图如下
epoch 0
epoch 8
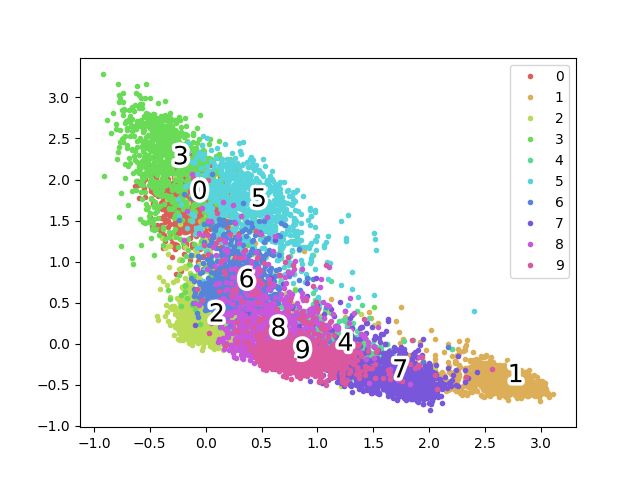
epoch 10

epoch 12
epoch 14,acc90%

epoch 25

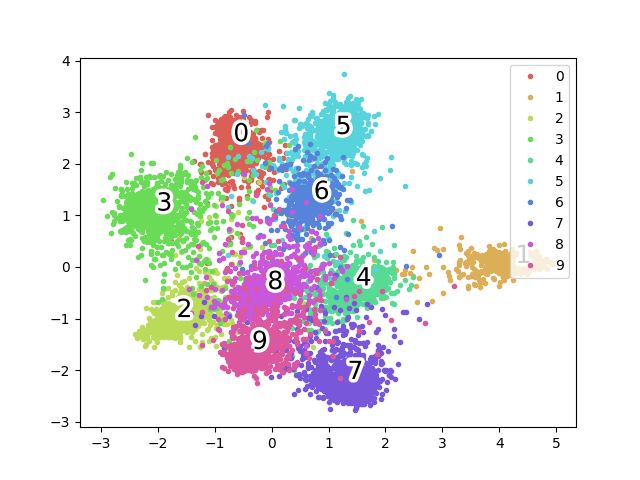
epoch 40

epoch 49,9 acc96%左右

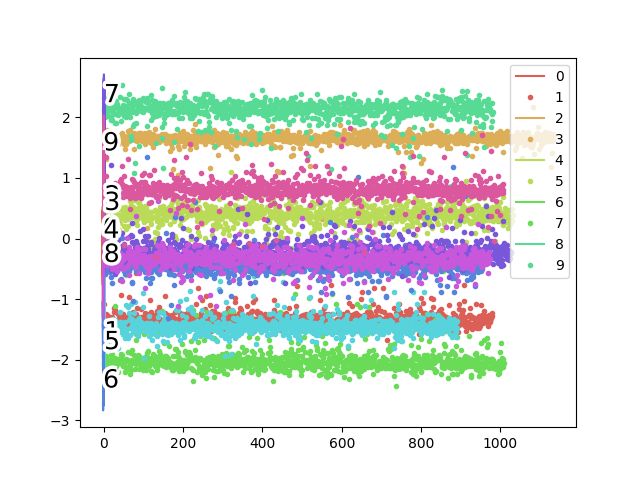
2.继续实验
改变 维度,2->10 变为 3->10,权重0.1 acc 97.6%

改变权重, 3->10 0.5 acc 97.5%

说明改变最后第二层维度可以提升ACC,且权重越大,不同类之间的距离越大
改网络结构,net-》convnet,3->10,权重为0.1
第二个epoch acc就到50%+了,到15个epoch ACC达到99%+
第5epoch

第15个epoch,ACC 99%+
效果更佳