Android LCD(四):LCD驱动调试篇
关键词:android LCD TFTSN75LVDS83B TTL-LVDS LCD电压背光电压
平台信息:
内核:linux2.6/linux3.0
系统:android/android4.0
平台:samsung exynos 4210、exynos 4412 、exynos 5250
作者:xubin341719(欢迎转载,请注明作者)
欢迎指正错误,共同学习、共同进步!!
下载链接:LCD规格书(404份),之前工作用用到的 、 LCD规格书00 、 LCD规格书01 、 LCD测试图片,彩条灰阶等
Android LCD(一):LCD基本原理篇
Android LCD(二):LCD常用接口原理篇
Android LCD(三):Samsung LCD接口篇
Android LCD(四):LCD驱动调试篇
这篇我们以一个实例来说明,Samsung Exynos4412搭配TTL转LVDS芯片SN75LVDS83B、LVDS接口LCD为例说明。从硬件接口、驱动配置、背光PWM调节三部分说明。
下载:SN75LVDS83B规格书
一、LCD接口原理以及硬件电路
Samsung Exynos4412、SN75LVDS83B、LVDS接口LCD(24bit)为例说明,三者的关系如下:
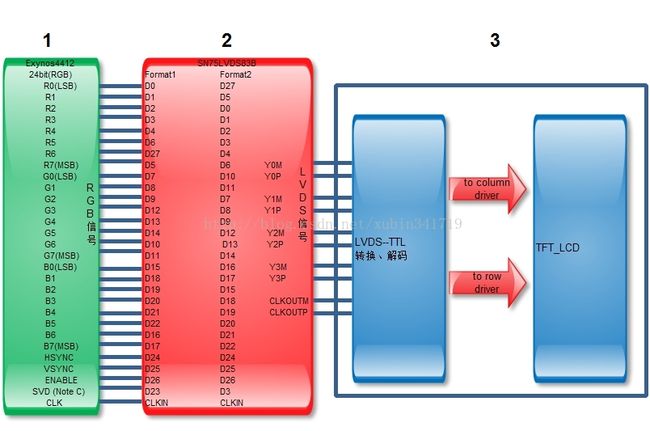
如上图所示,我们在应用中我,主控(Exynos4412)输出RGB信号到TFT-LCD大体经过三部分:
(1)、标号1部分,主控(Exynos4412)输出TTL信号;
(2)、标号2部分,TTL(RGB)-LVDS转换芯片SN75LVDS83B,把TTL信号转换成LVDS信号,传输到显示器的LVDS接收端;这部分有SN75LVDS83B编码芯片自动完成,所以我们不需要程序控制;
(3)、标号3部分,分两个小部分,LVDS转换成TTL,TFT-LCD显示部分;我们前面说过,TFT-LCD其实只识别TTL信号,所以要有一个转换的过程,先把LVDS信号转换、解码成TTL信号,在TFT-LCD上显示。
有上面的过程,其实我们关心调试的部分只有标号1部分到标号2部分,后面标号2到标号3的部分是自动完成的,不需要我们程序上控制,把标号2部分、标号3部分合并:

标号二部分可以理解为一个TTL(RGB)接口的LCD,如下图所示,标号一部分就是主控信号输出端,简化图如下所示:

其实最简单的做法就是找个TTL接口的TFT-LCD,这样直接接上就可以。下面我们看下硬件上的电路连接:这个和我们上篇用的相同。
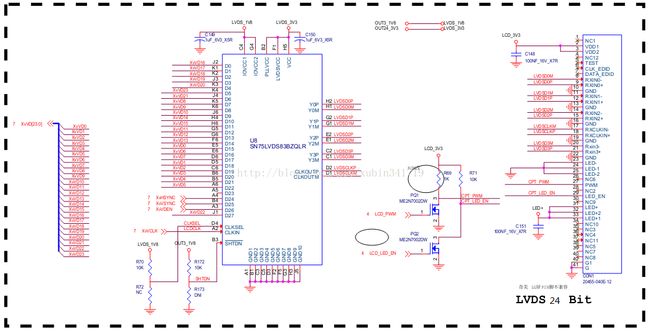
有上面图可以看出:硬件连接
网络标号 |
说明 |
管脚 |
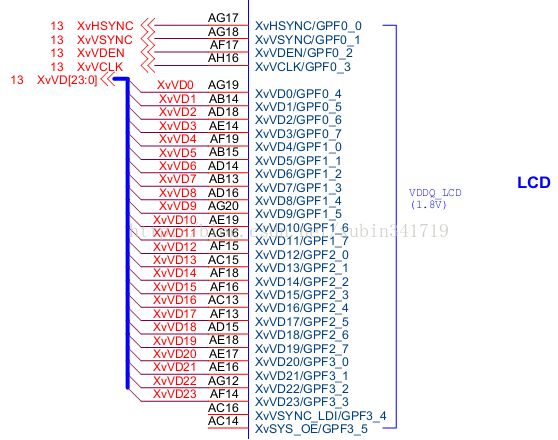
XvVD[0:23] XvVDEN XvVSYNC XvHSYNC XvVCLK |
RGB数据、使能、行场同步、时钟信号 |
这是TTL信号输出 |
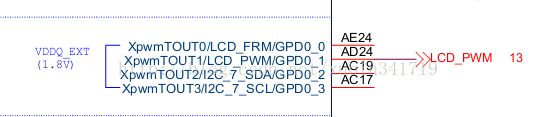
LCD_PWM |
调节背光 |
XpwmTOUT1/LCD_PWM/GPD0_1 |
LCD_LED_EN |
LCD电压(TFT电压)使能 |
GPC1_2 |
LED_BL_EN |
LED背光使能 |
GPL2_4 |
上面可分为几部分,电路连接部分分析:
(1)、TTL数据部分
这张图有木有烂掉呀,哈哈,就是这些数据了。还有有木有想起来摄像头的数据(ITU接口)也是这样的??其实视频这种信号的原理是通用的,所以LCD通了,摄像头也就知道怎么回事了。
(2)、PWM背光调节
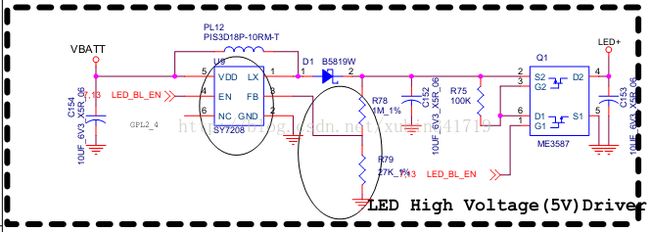
PWM其实也是芯片的一个功能模块,看到他的管脚就是一个复用脚XpwmTOUT1/LCD_PWM/GPD0_1。上一篇我们粗略的了解了PWM,就是用到这里。但是有一个疑问,PWM是调节背光电压的,背光电压一般都是12V以上的,我们PWM只有0-3V的样子,Exynos4412的IO只有1.8V。怎么调节电压???
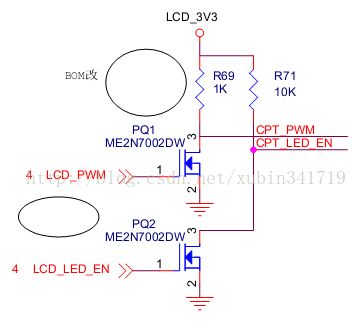
其实这个PWM只是给LCD上PWM控制部分,真正的电压还是通过LCD控制板上的电路实现。
我们可以看到这个升压电路,通过 SY7208 把 VBATT 升压到 18V ,供给 LED 背光。 SY7208 最大升压 26V 。这个电压是提供给我们前面讲的背光的,也就是 CCFL 灯管或者 LED 背光组的电压。
b、LCD电压
这个电压也就是给你我们TFT阵列组用的,控制LCD液晶元素。
这部分电路分析完成,我们就有比较清晰的思路出,要一个LCD工作,要完成两部分内容:LCD上电控制,背光、LCD电压;信号输出。
二、LCD 驱动部分调试
LCD这部分,像上篇我们说的frambuffer这些部分一般平台都是可以用的,除非你是芯片厂的要写这部分。一般公司拿到的demo板子这部分都是通的,只是针对自己的lCD换一些参数。
下面我们针对三星平台我们调试LCD的时时候程序方面的改动:
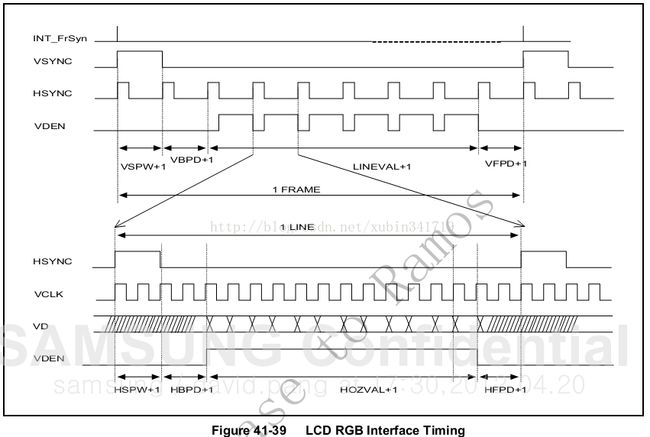
1、屏参数的配置
/kernel/drivers/video/Samsung/s3cfb_wa101s.c
static struct s3cfb_lcd wa101 = {
.width = 1280,//LCD 分辨率宽1280
.height = 800, //LCD 分辨率高 800
.bpp = 24,//CLD 数据位 24bit
.freq = 60,//LCD 像素时钟 60MHz
.timing = {//LCD porch无效值
.h_fp = 70,
.h_bp = 70,
.h_sw = 20,
.v_fp = 10,
.v_fpe = 0,
.v_bp = 10,
.v_bpe = 0,
.v_sw = 3,
},
.polarity = {//时钟、行场的极性;
.rise_vclk = 1,
.inv_hsync = 1,
.inv_vsync = 1,
.inv_vden = 0,
},
};
/* name should be fixed as 's3cfb_set_lcd_info' */
void s3cfb_set_lcd_info(struct s3cfb_global *ctrl)//初始化结构体
{
wa101.init_ldi = NULL;
ctrl->lcd = &wa101;
#endif
}
2、数据管脚初始化
kernel/arch/arm/mach-exynos/setup-fb-s5p.c
void s3cfb_cfg_gpio(struct platform_device *pdev)
{
s3cfb_gpio_setup_24bpp(EXYNOS4_GPF0(0), 8, S3C_GPIO_SFN(2), S5P_GPIO_DRVSTR_LV4);
s3cfb_gpio_setup_24bpp(EXYNOS4_GPF1(0), 8, S3C_GPIO_SFN(2), S5P_GPIO_DRVSTR_LV4);
s3cfb_gpio_setup_24bpp(EXYNOS4_GPF2(0), 8, S3C_GPIO_SFN(2), S5P_GPIO_DRVSTR_LV4);
s3cfb_gpio_setup_24bpp(EXYNOS4_GPF3(0), 4, S3C_GPIO_SFN(2), S5P_GPIO_DRVSTR_LV4);
}
kernel/arch/arm/mach-exynos/setup-fb-s5p.c
int s3cfb_clk_on(struct platform_device *pdev, struct clk **s3cfb_clk)
{
struct clk *sclk = NULL;
struct clk *mout_mpll = NULL;
struct clk *lcd_clk = NULL;
u32 rate = 0;
int ret = 0;
lcd_clk = clk_get(&pdev->dev, "lcd");
if (IS_ERR(lcd_clk)) {
dev_err(&pdev->dev, "failed to get operation clk for fimd\n");
goto err_clk0;
}
ret = clk_enable(lcd_clk);
if (ret < 0) {
dev_err(&pdev->dev, "failed to clk_enable of lcd clk for fimd\n");
goto err_clk0;
}
clk_put(lcd_clk);
sclk = clk_get(&pdev->dev, "sclk_fimd");
if (IS_ERR(sclk)) {
dev_err(&pdev->dev, "failed to get sclk for fimd\n");
goto err_clk1;
}
if (soc_is_exynos4210())
mout_mpll = clk_get(&pdev->dev, "mout_mpll");
else
mout_mpll = clk_get(&pdev->dev, "mout_mpll_user");
if (IS_ERR(mout_mpll)) {
dev_err(&pdev->dev, "failed to get mout_mpll for fimd\n");
goto err_clk2;
}
ret = clk_set_parent(sclk, mout_mpll);
if (ret < 0) {
dev_err(&pdev->dev, "failed to clk_set_parent for fimd\n");
goto err_clk2;
}
if ((soc_is_exynos4412()) && (samsung_rev() >= EXYNOS4412_REV_2_0))
ret = clk_set_rate(sclk, 880000000);
else
ret = clk_set_rate(sclk, 800000000);
if (ret < 0) {
dev_err(&pdev->dev, "failed to clk_set_rate of sclk for fimd\n");
goto err_clk2;
}
dev_dbg(&pdev->dev, "set fimd sclk rate to %d\n", rate);
clk_put(mout_mpll);
ret = clk_enable(sclk);
if (ret < 0) {
dev_err(&pdev->dev, "failed to clk_enable of sclk for fimd\n");
goto err_clk2;
}
*s3cfb_clk = sclk;
return 0;
err_clk2:
clk_put(mout_mpll);
err_clk1:
clk_put(sclk);
err_clk0:
clk_put(lcd_clk);
return -EINVAL;
}
int s3cfb_clk_off(struct platform_device *pdev, struct clk **clk)
{
struct clk *lcd_clk = NULL;
lcd_clk = clk_get(&pdev->dev, "lcd");
if (IS_ERR(lcd_clk)) {
printk(KERN_ERR "failed to get ip clk for fimd0\n");
goto err_clk0;
}
clk_disable(lcd_clk);
clk_put(lcd_clk);
clk_disable(*clk);
clk_put(*clk);
*clk = NULL;
return 0;
err_clk0:
clk_put(lcd_clk);
return -EINVAL;
}
void s3cfb_get_clk_name(char *clk_name)
{
strcpy(clk_name, "sclk_fimd");
}
LCD_LED_EN |
LCD电压(TFT电压)使能 |
GPC1_2 |
LED_BL_EN |
LED背光使能 |
GPL2_4 |
int s3cfb_backlight_on(struct platform_device *pdev)
{
int err;
pwm_set();
err = gpio_request_one(EXYNOS4_GPL2(4), GPIOF_OUT_INIT_HIGH, "GPL2_4");
if (err) {
printk(KERN_ERR "failed to request GPL2 for "
"lcd backlight control\n");
return err;
}
s3c_gpio_setpull(EXYNOS4_GPL2(4),S3C_GPIO_PULL_NONE);
gpio_direction_output(EXYNOS4_GPL2(4), 1);
gpio_free(EXYNOS4_GPL2(4));
mdelay(20);
err = gpio_request_one(EXYNOS4_GPC1(2), GPIOF_OUT_INIT_HIGH, "GPC1_2");
if (err) {
printk(KERN_ERR "failed to request GPC1 for "
"lcd backlight control\n");
return err;
}
s3c_gpio_setpull(EXYNOS4_GPC1(2),S3C_GPIO_PULL_NONE);
gpio_direction_output(EXYNOS4_GPC1(2), 0);
gpio_free(EXYNOS4_GPC1(2));
mdelay(20);
err = gpio_request(EXYNOS4_GPD0(1), "GPD0_1");
if (err) {
printk(KERN_ERR "failed to request GPD0_1 for "
"lcd pwm control\n");
return err;
}
s3c_gpio_setpull(EXYNOS4_GPD0(1),S3C_GPIO_PULL_NONE);
s5p_gpio_set_drvstr(EXYNOS4_GPD0(1), S5P_GPIO_DRVSTR_LV4);
gpio_direction_output(EXYNOS4_GPD0(1), 1);
s3c_gpio_cfgpin(EXYNOS4_GPD0(1), EXYNOS4_GPD_0_1_TOUT_1);
gpio_free(EXYNOS4_GPD0(1));
mdelay(20);
return 0;
return 0;
}
int s3cfb_backlight_off(struct platform_device *pdev)
{
int err;
err = gpio_request_one(EXYNOS4_GPL2(4), GPIOF_OUT_INIT_LOW, "GPL2_4");
if (err) {
printk(KERN_ERR "failed to request GPL2 for "
"lcd backlight control\n");
return err;
}
s3c_gpio_setpull(EXYNOS4_GPL2(4),S3C_GPIO_PULL_NONE);
gpio_direction_output(EXYNOS4_GPL2(4), 0);
gpio_free(EXYNOS4_GPL2(4));
err = gpio_request_one(EXYNOS4_GPC1(2), GPIOF_OUT_INIT_HIGH, "GPC1_2");
if (err) {
printk(KERN_ERR "failed to request GPC1 for "
"lcd backlight control\n");
return err;
}
gpio_free(EXYNOS4_GPC1(2));
return 0;
}
5、PWM的设置
arch/arm/mach-exynos/mach-smdk4x12.c
Arch/arm/mach-exynos/mach-smdk4x12.c
/* LCD Backlight data */
static struct samsung_bl_gpio_info smdk4x12_bl_gpio_info = {
.no = EXYNOS4_GPD0(1),//PWM管脚XpwmTOUT1/LCD_PWM/GPD0_1
.func = S3C_GPIO_SFN(2),
};
static struct platform_pwm_backlight_data smdk4x12_bl_data = {
.pwm_id = 1,//PWM ID PWM编号为1号;
.pwm_period_ns = 90000, //22k
};
static void __init smdk4x12_machine_init(void)
{
………………
samsung_bl_set(&smdk4x12_bl_gpio_info, &smdk4x12_bl_data);//在初始化的时候把对应的结构体初始化
………………
}
samsung_bl_set看下这个函数的实现:
kernel/arch/arm/palt-samsung/dev-backlight.c
void samsung_bl_set(struct samsung_bl_gpio_info *gpio_info,
struct platform_pwm_backlight_data *bl_data)
{
int ret = 0;
struct platform_device *samsung_bl_device;
struct platform_pwm_backlight_data *samsung_bl_data;
samsung_bl_device = kmemdup(&samsung_dfl_bl_device,
sizeof(struct platform_device), GFP_KERNEL);//(1)、分配内存空间;
if (!samsung_bl_device) {
printk(KERN_ERR "%s: no memory for platform dev\n", __func__);
return;
}
samsung_bl_data = s3c_set_platdata(&samsung_dfl_bl_data,
sizeof(struct platform_pwm_backlight_data), samsung_bl_device);//(2)、
if (!samsung_bl_data) {
printk(KERN_ERR "%s: no memory for platform dev\n", __func__);
goto err_data;
}
/* Copy board specific data provided by user */
samsung_bl_data->pwm_id = bl_data->pwm_id;//(3)、把具体配置的数据给samsung_bl_data
samsung_bl_device->dev.parent =
&s3c_device_timer[samsung_bl_data->pwm_id].dev;
if (bl_data->max_brightness)//(4)、对bl_data的结构体检查,如果没有复制则用default的值
samsung_bl_data->max_brightness = bl_data->max_brightness;
if (bl_data->dft_brightness)
samsung_bl_data->dft_brightness = bl_data->dft_brightness;
if (bl_data->lth_brightness)
samsung_bl_data->lth_brightness = bl_data->lth_brightness;
if (bl_data->pwm_period_ns)
samsung_bl_data->pwm_period_ns = bl_data->pwm_period_ns;
if (bl_data->init)
samsung_bl_data->init = bl_data->init;
if (bl_data->notify)
samsung_bl_data->notify = bl_data->notify;
if (bl_data->exit)
samsung_bl_data->exit = bl_data->exit;
if (bl_data->check_fb)
samsung_bl_data->check_fb = bl_data->check_fb;
/* Keep the GPIO info for future use */
s3c_device_timer[samsung_bl_data->pwm_id].dev.platform_data = gpio_info;
/* Register the specific PWM timer dev for Backlight control */
ret = platform_device_register(//(5)、注册PWM设备驱动;
&s3c_device_timer[samsung_bl_data->pwm_id]);
if (ret) {
printk(KERN_ERR "failed to register pwm timer for backlight: %d\n", ret);
goto err_plat_reg1;
}
/* Register the Backlight dev */
ret = platform_device_register(samsung_bl_device);//(6)、注册背光设备驱动;
if (ret) {
printk(KERN_ERR "failed to register backlight device: %d\n", ret);
goto err_plat_reg2;
}
return;
err_plat_reg2://(7)、如果有异常的情况下退出;
platform_device_unregister(&s3c_device_timer[samsung_bl_data->pwm_id]);
err_plat_reg1:
kfree(samsung_bl_data);
err_data:
kfree(samsung_bl_device);
return;
}
(1)、分配内存空间
samsung_bl_device = kmemdup(&samsung_dfl_bl_device,
sizeof(struct platform_device), GFP_KERNEL);
其中:
static struct platform_pwm_backlight_data samsung_dfl_bl_data = {
.max_brightness = 255,
.dft_brightness = 140,
.pwm_period_ns = 78770,
.init = samsung_bl_init,
.exit = samsung_bl_exit,
};
static struct platform_device samsung_dfl_bl_device = {
.name = "pwm-backlight",
};
(2)、
(3)、把具体配置的数据给samsung_bl_data
arch/arm/mach-exynos/mach-smdk4x12.c
static struct samsung_bl_gpio_info smdk4x12_bl_gpio_info = {
.no = EXYNOS4_GPD0(1),//PWM管脚XpwmTOUT1/LCD_PWM/GPD0_1
.func = S3C_GPIO_SFN(2),
};
static struct platform_pwm_backlight_data smdk4x12_bl_data = {
.pwm_id = 1,//PWM ID PWM编号为1号;
.pwm_period_ns = 90000, //22k
};(4)、对bl_data的结构体检查,如果没有复制则用default的值
参考(1)中的那些值。
(5)、注册PWM设备驱动;
ret = platform_device_register(
&s3c_device_timer[samsung_bl_data->pwm_id]);
struct platform_device s3c_device_timer[] = {
[0] = { DEFINE_S3C_TIMER(0, IRQ_TIMER0) },
[1] = { DEFINE_S3C_TIMER(1, IRQ_TIMER1) },
[2] = { DEFINE_S3C_TIMER(2, IRQ_TIMER2) },
[3] = { DEFINE_S3C_TIMER(3, IRQ_TIMER3) },
[4] = { DEFINE_S3C_TIMER(4, IRQ_TIMER4) },(6)、注册背光设备驱动;
ret =platform_device_register(samsung_bl_device); samsung_bl_data = s3c_set_platdata(&samsung_dfl_bl_data,
sizeof(struct platform_pwm_backlight_data), samsung_bl_device);
(7)、如果有异常的情况下退出;
6、PWM_BL背光驱动分析:
Kernel/drivers/video/backlight/pwm_bl.c
(1)、驱动注册:
static struct platform_driver pwm_backlight_driver = {
.driver = {
.name = "pwm-backlight",
.owner = THIS_MODULE,
},
.probe = pwm_backlight_probe,
.remove = pwm_backlight_remove,
.suspend = pwm_backlight_suspend,
.resume = pwm_backlight_resume,
};
static int __init pwm_backlight_init(void)
{
return platform_driver_register(&pwm_backlight_driver);
}
(2)、probe函数分析
static int pwm_backlight_probe(struct platform_device *pdev)
{
struct backlight_properties props;
struct platform_pwm_backlight_data *data = pdev->dev.platform_data;
struct backlight_device *bl;
struct pwm_bl_data *pb;
int ret;
if (!data) {
dev_err(&pdev->dev, "failed to find platform data\n");
return -EINVAL;
}
if (data->init) {
ret = data->init(&pdev->dev);
if (ret < 0)
return ret;
}
pb = kzalloc(sizeof(*pb), GFP_KERNEL);
if (!pb) {
dev_err(&pdev->dev, "no memory for state\n");
ret = -ENOMEM;
goto err_alloc;
}
global_pb=pb;
INIT_DELAYED_WORK_DEFERRABLE(&key_event, key_event_work);//1)、任务队列初始化;
pb->period = data->pwm_period_ns;//2)、pb结构体初始化;
pb->notify = data->notify;
pb->check_fb = data->check_fb;
pb->lth_brightness = data->lth_brightness *
(data->pwm_period_ns / data->max_brightness);
pb->dev = &pdev->dev;
pb->pwm = pwm_request(data->pwm_id, "backlight");
if (IS_ERR(pb->pwm)) {
dev_err(&pdev->dev, "unable to request PWM for backlight\n");
ret = PTR_ERR(pb->pwm);
goto err_pwm;
} else
dev_dbg(&pdev->dev, "got pwm for backlight\n");
memset(&props, 0, sizeof(struct backlight_properties));
props.type = BACKLIGHT_RAW;
props.max_brightness = data->max_brightness;
bl = backlight_device_register(dev_name(&pdev->dev), &pdev->dev, pb,
&pwm_backlight_ops, &props);
if (IS_ERR(bl)) {
dev_err(&pdev->dev, "failed to register backlight\n");
ret = PTR_ERR(bl);
goto err_bl;
}
global_bl=bl;
bl->props.brightness = data->dft_brightness;
backlight_update_status(bl);//3)、更新背光状态;
platform_set_drvdata(pdev, bl);
return 0;
err_bl:
pwm_free(pb->pwm);
err_pwm:
kfree(pb);
err_alloc:
if (data->exit)
data->exit(&pdev->dev);
return ret;
}
1)、任务队列初始化;
把key_event_work加入key_event队列,
INIT_DELAYED_WORK_DEFERRABLE(&key_event, key_event_work);队列调度函数:
static void key_event_work(struct work_struct *work)
{
global_pb->period=90000;
global_bl->props.brightness=global_brightness;
backlight_update_status(global_bl);
return ;
}
static inline void backlight_update_status(struct backlight_device *bd)
{
mutex_lock(&bd->update_lock);
if (bd->ops && bd->ops->update_status)
bd->ops->update_status(bd);
mutex_unlock(&bd->update_lock);
}
update_status在pwm_backlight_ops结构体重指定:
static const struct backlight_ops pwm_backlight_ops = {
.update_status = pwm_backlight_update_status,
…………}
pwm_backlight_update_status我们后面分析,这个其实就是我们PWM设定实现的具体实施过程。
2)、pb结构体初始化;
pb->period = data->pwm_period_ns; pb->notify = data->notify;
pb->check_fb = data->check_fb;
pb->lth_brightness = data->lth_brightness *
(data->pwm_period_ns / data->max_brightness);
pb->dev = &pdev->dev;
pb->pwm = pwm_request(data->pwm_id, "backlight");
3)、更新背光状态
backlight_update_status(bl);(4)、PWM_SET
当UI设置PWM时,会调用到驱动中的pwm_set(void)这个函数。这个函数主要在开机时使用。
int pwm_set(void)
{
int error;
struct backlight_device *bl = global_bl;
struct pwm_bl_data *pb = global_pb;
printk("%s__%d\n",__func__,pb->period);
pb->period=410000;
backlight_update_status(bl);
schedule_delayed_work(&key_event, 600); //调用队列,跟新亮度信息;
return 0;
}
(5)、pwm_backlight_update_status这个就是PWM变化的具体实现,当应用层调节时,会调用到这个函数,把改变的值填入寄存器。
static int pwm_backlight_update_status(struct backlight_device *bl)
{
struct pwm_bl_data *pb = dev_get_drvdata(&bl->dev);
int brightness = bl->props.brightness;
int max = bl->props.max_brightness;
//if(brightness==0)
// return 0;
//printk("#####%s#%d__%d\n",__func__,pb->period,brightness);
global_brightness=brightness;
if (bl->props.power != FB_BLANK_UNBLANK)
brightness = 0;
if (bl->props.fb_blank != FB_BLANK_UNBLANK)
brightness = 0;
if (pb->notify)
brightness = pb->notify(pb->dev, brightness);
if (brightness == 0) {
pwm_config(pb->pwm, 0, pb->period);
pwm_disable(pb->pwm);
} else {
#if 1
brightness = pb->lth_brightness +
(brightness * (pb->period - pb->lth_brightness) / max);
#else
brightness = pb->lth_brightness +
(((pb->period - pb->lth_brightness) / max) * brightness );
#endif
pwm_config(pb->pwm, brightness, pb->period);//这里对PWM寄存器的具体操作;
pwm_enable(pb->pwm);
}
return 0;
}

三、LCD UBOOT下的控制(待整理…………)
LCD 在UBOOT下的控制,这部分我们没做过,后面有机会做了再把这部分完善,或者找个机会把代码详细看看。