Apollo进阶课程㊴丨Apollo安装过程概述
原创: 阿波君 Apollo开发者社区 1周前

Apollo是一个自动驾驶的平台,推荐的参考运行环境为:ThinkPAD X240、CPU:i5 、四核 、内存 8G、 硬盘容量40G以上。
上周阿波君为大家详细介绍了「进阶课程㊳丨Apollo平台的快速入门」。
此课程主要讲解了Apollo的快速入门方法,包括编译、高精地图和实时相对地图、一些调试工具以及新加入的计算单元和模块。
本周阿波君将继续与大家分享Apollo安装过程概述的相关课程。下面,我们一起进入进阶课程第39期。
目录
1.安装过程
2.使用仿真平台
1.安装过程
如图1所示,安装主要分为三步。安装基础环境,拉取Docker镜像并创建容器,进入容器编译源码。下面介绍具体的安装过程。

图1 Apollo系统的安装过程
首先是安装git,因为Apollo代码是托管在github平台的,所以需要git工具。然后使用git将Apollo源码克隆到本地,如图2所示。
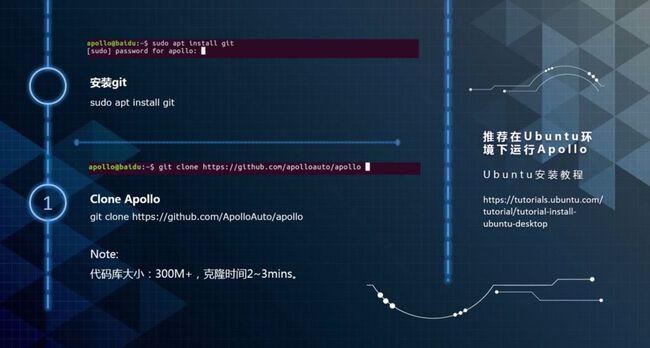
图2 安装git和拉取镜像
下载源码之后,还要安装Docker环境,可以使用Apollo提供的脚本安装也可以根据Docker官网的指南进行安装。安装完Docker之后需要验证。重启系统并进入Apollo项目所在文件夹,然后运行docker ps命令,显示容器数据为0,则表示Docker安装完成。
Docker环境安装好之后,使用官方提供的脚本拉取Apollo Docker镜像文件,运行dev_start.sh–C命令,其中–C选项表示使用中国服务器进行加速。在拉取成功之后,该脚本会基于镜像创建一个容器Container。

图3 Docker环境安装和验证
注意:每次都要执行这个操作,因为CONTAINER需要每次都创建。
接下来是对Apollo的操作,如果没有编译,需要先使用apollo.sh脚本进行编译。它有很多编译选项,默认的是Build和OP。还可以选择面向GPU编译。RS是对RB速腾聚创的激光雷达进行编译,USB Camera是对Camera的编译,这几种编译方式所涉及的类不同,所以使用的编译方式也不尽相同。
编译完成之后,需要对Apollo各个模块进行调试,我们会在每个版本发布的时候给出对应的Rosbag数据包,方便去做验证。比如说Apollo 1.0提供了一个循迹数据包,2.0时发布了一个激光点云的数据包。
我们可以启动bootstrap.sh脚本,对Apollo的bag进行回放,看一下效果。这是一个引导脚本,它做了以下事情,启动进程守护工具Supervisor,假如有进程出现不可预知的异常,这些进程通常会挂掉,经过配置后Supervisor可以保证在进程挂掉后,会将该进程拉进来。然后启动Roscore、voice_dectore和Dreamviewer。
对于Apollo平台,很多的模块都被启动,交由Supervisor进程进行监控,包括Can Bus、 激光雷达、控制模块、GPS、Mobileeye、NG等模块。
在运行完bootstrap.sh脚本之后,在浏览器地址栏输入localhost:8888查看Demo的演示效果。Demo加载bag对应的数据,包括车辆的数据、障碍物数据、绿色障碍物ID、速度、形态。车在运行过程中需要查看的不仅仅是仿真出来的场景,还要看一些跟Planner、控制相关的信息。
2.使用仿真平台
仿真平台的使用方式大概分为以下几个步骤,如图4所示。

图4 Apollo 仿真平台
按照图5所指示的方法可以进入官方仿真平台,前提是有百度的账号。

图5 如何使用仿真平台