python下使用aruco标记进进行三维姿势估计
ArUco标记
首先什么是aruco标记呢?
aruco标记是可用于摄像机姿态估计的二进制方形基准标记。它的主要优点是检测简单、快速,并且具有很强的鲁棒性。ArUco 标记是由宽黑色边框和确定其标识符(id)的内部二进制矩阵组成的正方形标记。aruco标记的黑色边框有助于其在图像中的快速检测,内部二进制编码用于识别标记和提供错误检测和纠正。aruco标记尺寸的大小决定内部矩阵的大小,例如尺寸为 4x4 的标记由 16 位二进制数组成。
通俗地说,aruco标记其实就是一种编码,就和我们日常生活中的二维码是相似的,只不过由于编码方式的不同,导致它们存储信息的方式、容量等等有所差异,所以在应用层次上也会有所不同。由于单个aruco标记就可以提供足够的对应关系,例如有四个明显的角点及内部的二进制编码,所以aruco标记被广泛用来增加从二维世界映射到三维世界时的信息量,便于发现二维世界与三维世界之间的投影关系,从而实现姿态估计、相机矫正等等应用。
OpenCV中的ArUco模块包括了对aruco标记的创建和检测,以及将aruco标记用于姿势估计和相机矫正等应用的相关API,同时还提供了标记板等等。本次笔记中主要先整理aruco标记的创建与检测。
首先我们创建aruco标记时,需要先指定一个字典,这个字典表示的是创建出来的aruco标记具有怎样的尺寸、怎样的编码等等内容,我们使用APIgetPredefinedDictionary()来声明我们使用的字典。在OpenCV中,提供了多种预定义字典,我们可以通过PREDEFINED_DICTIONARY_NAME来查看有哪些预定义字典。而且字典名称表示了该字典的aruco标记数量和尺寸,例如DICT_7X7_50表示一个包含了50种7x7位标记的字典。
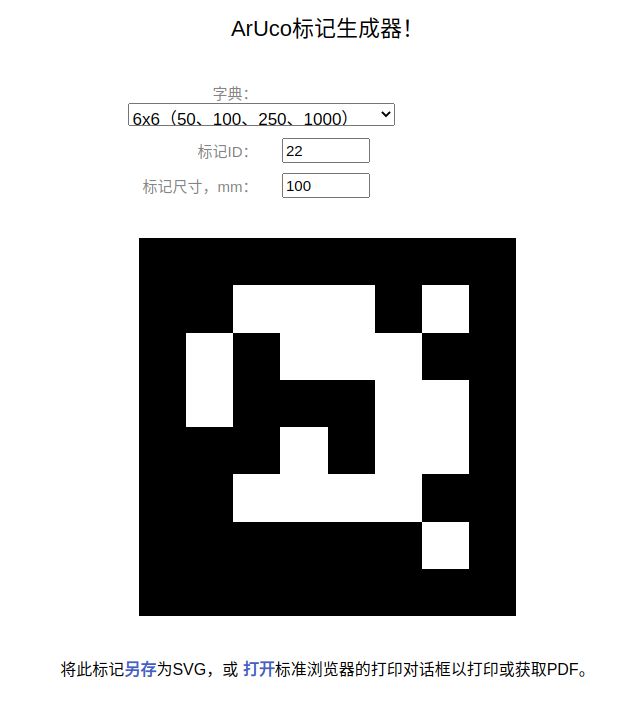
ArUco标记生成器
在线aruco标记生成器:http://aruco.dgut.top/
(备用):https://chev.me/arucogen/
在OpenCV中生成ArUco标记
opencv-python生成aruco标记
确定好我们需要的字典后,就可以通过APIdrawMarker()来绘制出aruco标记,其参数含义如下:
import cv2
import numpy as np
# 生成aruco标记
# 加载预定义的字典
dictionary = cv2.aruco.Dictionary_get(cv2.aruco.DICT_6X6_250)
# 生成标记
markerImage = np.zeros((200, 200), dtype=np.uint8)
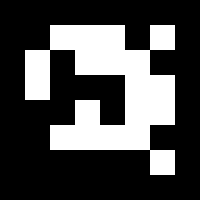
markerImage = cv2.aruco.drawMarker(dictionary, 22, 200, markerImage, 1)
cv2.imwrite("marker22.png", markerImage)
opencv的aruco模块共有25个预定义的标记词典。每个词典中所有的Aruco标记均包含相同数量的块或位(例如4×4、5×5、6×6或7×7),且每个词典中Aruco标记的数量固定(例如50、100、250或1000)。
cv2.aruco.Dictionary_get()函数会加载cv2.aruco.DICT_6X6_250包含250个标记的字典,其中每个标记都是6×6位二进制模式
cv2.aruco.drawMarker(dictionary, 22, 200, markerImage, 1)中的第二个参数22是aruco的标记id(0~249),第三个参数决定生成的标记的大小,在上面的示例中,它将生成200×200像素的图像,第四个参数表示将要存储aruco标记的对象(上面的markerImage),最后,第五个参数是边界宽度参数,它决定应将多少位(块)作为边界添加到生成的二进制图案中。
执行后将会生成这样的标记:标记id分别是22
展开查看的内容;
DICT_4X4_50
Python: cv.aruco.DICT_4X4_50
DICT_4X4_100
Python: cv.aruco.DICT_4X4_100
DICT_4X4_250
Python: cv.aruco.DICT_4X4_250
DICT_4X4_1000
Python: cv.aruco.DICT_4X4_1000
DICT_5X5_50
Python: cv.aruco.DICT_5X5_50
DICT_5X5_100
Python: cv.aruco.DICT_5X5_100
DICT_5X5_250
Python: cv.aruco.DICT_5X5_250
DICT_5X5_1000
Python: cv.aruco.DICT_5X5_1000
DICT_6X6_50
Python: cv.aruco.DICT_6X6_50
DICT_6X6_100
Python: cv.aruco.DICT_6X6_100
DICT_6X6_250
Python: cv.aruco.DICT_6X6_250
DICT_6X6_1000
Python: cv.aruco.DICT_6X6_1000
DICT_7X7_50
Python: cv.aruco.DICT_7X7_50
DICT_7X7_100
Python: cv.aruco.DICT_7X7_100
DICT_7X7_250
Python: cv.aruco.DICT_7X7_250
DICT_7X7_1000
Python: cv.aruco.DICT_7X7_1000
DICT_ARUCO_ORIGINAL
Python: cv.aruco.DICT_ARUCO_ORIGINAL
DICT_APRILTAG_16h5
Python: cv.aruco.DICT_APRILTAG_16h5
4x4 bits, minimum hamming distance between any two codes = 5, 30 codes
批量生成aruco标记
import cv2
import numpy as np
# 生成aruco标记
# 加载预定义的字典
dictionary = cv2.aruco.Dictionary_get(cv2.aruco.DICT_6X6_250)
# 生成标记
markerImage = np.zeros((200, 200), dtype=np.uint8)
for i in range(30):
markerImage = cv2.aruco.drawMarker(dictionary, i, 200, markerImage, 1);
firename='armark/'+str(i)+'.png'
cv2.imwrite(firename, markerImage);
在armark文件夹下会生成一系列的6*6 aruco标记

Aruco标记的检测和定位
静态检测
在环境中图像检测Aruco标记,环境中有7个标记
import numpy as np
import time
import cv2
import cv2.aruco as aruco
#读取图片
frame=cv2.imread('IMG_3739.jpg')
#调整图片大小
frame=cv2.resize(frame,None,fx=0.2,fy=0.2,interpolation=cv2.INTER_CUBIC)
#灰度话
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
#设置预定义的字典
aruco_dict = aruco.Dictionary_get(aruco.DICT_6X6_250)
#使用默认值初始化检测器参数
parameters = aruco.DetectorParameters_create()
#使用aruco.detectMarkers()函数可以检测到marker,返回ID和标志板的4个角点坐标
corners, ids, rejectedImgPoints = aruco.detectMarkers(gray,aruco_dict,parameters=parameters)
#画出标志位置
aruco.drawDetectedMarkers(frame, corners,ids)
cv2.imshow("frame",frame)
cv2.waitKey(0)
cv2.destroyAllWindows()
对于每次成功检测到标记,将按从左上,右上,右下和左下的顺序检测标记的四个角点。在C ++中,将这4个检测到的角点存储为点矢量,并将图像中的多个标记一起存储在点矢量容器中。在Python中,它们存储为Numpy 数组。
detectMarkers()函数用于检测和确定标记角点的位置。
- 第一个参数
image是带有标记的场景图像。- 第二个参数
dictionary是用于生成标记的字典。成功检测到的标记将存储在markerCorners中,其ID存储在markerIds中。先前初始化的DetectorParameters对象作为传递参数。- 第三个参数
parameters:DetectionParameters类的对象,该对象包括在检测过程中可以自定义的所有参数;- 返回参数
corners:检测到的aruco标记的角点列表,对于每个标记,其四个角点均按其原始顺序返回(从右上角开始顺时针旋转),第一个角是右上角,然后是右下角,左下角和左上角。- 返回
ids:检测到的每个标记的 id,需要注意的是第三个参数和第四个参数具有相同的大小;- 返回参数
rejectedImgPoints:抛弃的候选标记列表,即检测到的、但未提供有效编码的正方形。每个候选标记也由其四个角定义,其格式与第三个参数相同,该参数若无特殊要求可以省略。
corners, ids, rejectedImgPoints = aruco.detectMarkers(gray,aruco_dict,parameters=parameters)
当我们检测到aruco标签之后,为了方便观察,我们需要进行可视化操作,把标签标记出来:使用drawDetectedMarkers()这个API来绘制检测到的aruco标记,其参数含义如下:
- 参数image: 是将绘制标记的输入 / 输出图像(通常就是检测到标记的图像)
- 参数corners:检测到的aruco标记的角点列表
- 参数ids:检测到的每个标记对应到其所属字典中的id,可选(如果未提供)不会绘制ID。
- 参数borderColor:绘制标记外框的颜色,其余颜色(文本颜色和第一个角颜色)将基于该颜色进行计算,以提高可视化效果。
- 无返回值
aruco.drawDetectedMarkers(image, corners,ids,borderColor)
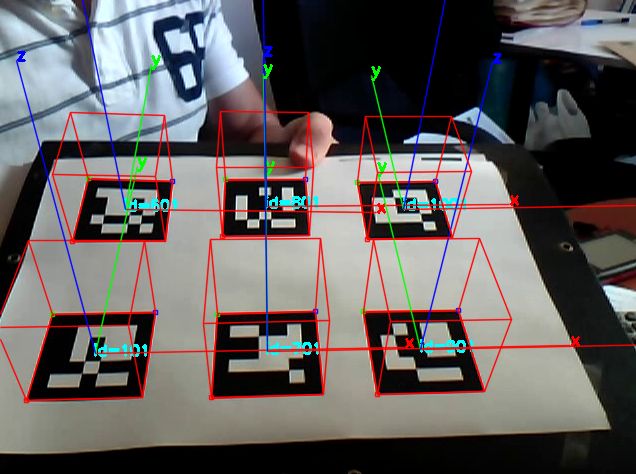
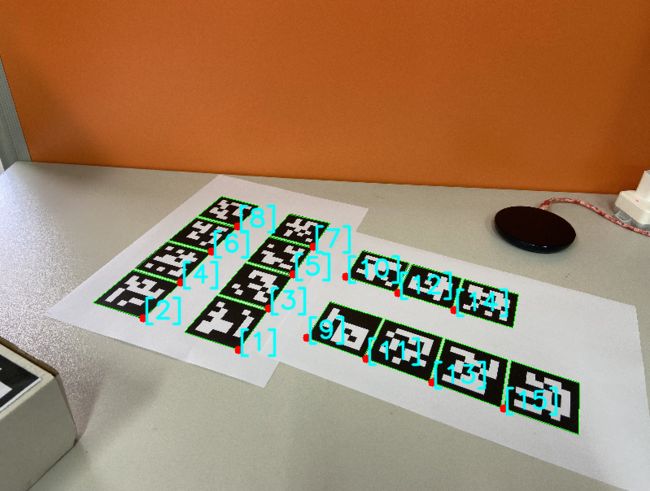
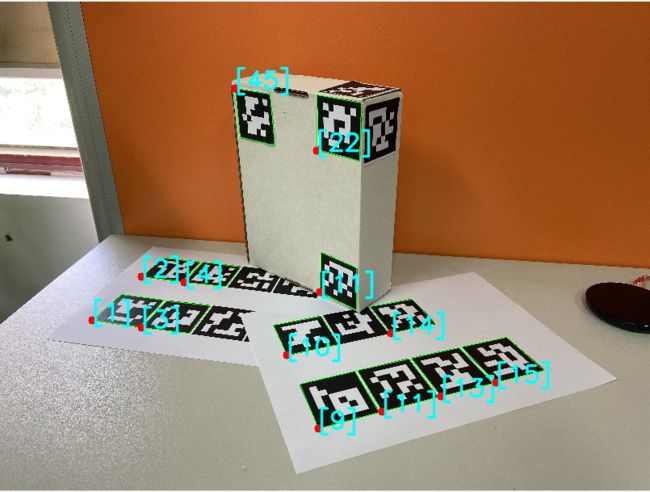
效果演示:


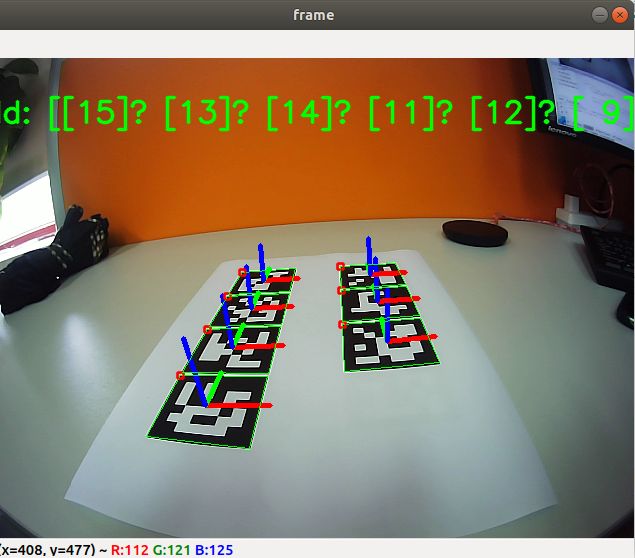
动态检测
利用摄像头进行一个实时动态监测aruco标记并且估计姿势,摄像头的内参需要提前标定,如何标定请看我另一篇文章
import numpy as np
import time
import cv2
import cv2.aruco as aruco
# mtx = np.array([
# [2946.48, 0, 1980.53],
# [ 0, 2945.41, 1129.25],
# [ 0, 0, 1],
# ])
# #我的手机拍棋盘的时候图片大小是 4000 x 2250
# #ip摄像头拍视频的时候设置的是 1920 x 1080,长宽比是一样的,
# #ip摄像头设置分辨率的时候注意一下
#
#
# dist = np.array( [0.226317, -1.21478, 0.00170689, -0.000334551, 1.9892] )
#相机纠正参数
# dist=np.array(([[-0.51328742, 0.33232725 , 0.01683581 ,-0.00078608, -0.1159959]]))
#
# mtx=np.array([[464.73554153, 0.00000000e+00 ,323.989155],
# [ 0., 476.72971528 ,210.92028],
# [ 0., 0., 1. ]])
dist=np.array(([[-0.58650416 , 0.59103816, -0.00443272 , 0.00357844 ,-0.27203275]]))
newcameramtx=np.array([[189.076828 , 0. , 361.20126638]
,[ 0 ,2.01627296e+04 ,4.52759577e+02]
,[0, 0, 1]])
mtx=np.array([[398.12724231 , 0. , 304.35638757],
[ 0. , 345.38259888, 282.49861858],
[ 0., 0., 1. ]])
cap = cv2.VideoCapture(0)
font = cv2.FONT_HERSHEY_SIMPLEX #font for displaying text (below)
#num = 0
while True:
ret, frame = cap.read()
h1, w1 = frame.shape[:2]
# 读取摄像头画面
# 纠正畸变
newcameramtx, roi = cv2.getOptimalNewCameraMatrix(mtx, dist, (h1, w1), 0, (h1, w1))
dst1 = cv2.undistort(frame, mtx, dist, None, newcameramtx)
x, y, w1, h1 = roi
dst1 = dst1[y:y + h1, x:x + w1]
frame=dst1
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
aruco_dict = aruco.Dictionary_get(aruco.DICT_6X6_250)
parameters = aruco.DetectorParameters_create()
dst1 = cv2.undistort(frame, mtx, dist, None, newcameramtx)
'''
detectMarkers(...)
detectMarkers(image, dictionary[, corners[, ids[, parameters[, rejectedI
mgPoints]]]]) -> corners, ids, rejectedImgPoints
'''
#使用aruco.detectMarkers()函数可以检测到marker,返回ID和标志板的4个角点坐标
corners, ids, rejectedImgPoints = aruco.detectMarkers(gray,aruco_dict,parameters=parameters)
# 如果找不打id
if ids is not None:
rvec, tvec, _ = aruco.estimatePoseSingleMarkers(corners, 0.05, mtx, dist)
# 估计每个标记的姿态并返回值rvet和tvec ---不同
# from camera coeficcients
(rvec-tvec).any() # get rid of that nasty numpy value array error
# aruco.drawAxis(frame, mtx, dist, rvec, tvec, 0.1) #绘制轴
# aruco.drawDetectedMarkers(frame, corners) #在标记周围画一个正方形
for i in range(rvec.shape[0]):
aruco.drawAxis(frame, mtx, dist, rvec[i, :, :], tvec[i, :, :], 0.03)
aruco.drawDetectedMarkers(frame, corners)
###### DRAW ID #####
cv2.putText(frame, "Id: " + str(ids), (0,64), font, 1, (0,255,0),2,cv2.LINE_AA)
else:
##### DRAW "NO IDS" #####
cv2.putText(frame, "No Ids", (0,64), font, 1, (0,255,0),2,cv2.LINE_AA)
# 显示结果框架
cv2.imshow("frame",frame)
key = cv2.waitKey(1)
if key == 27: # 按esc键退出
print('esc break...')
cap.release()
cv2.destroyAllWindows()
break
if key == ord(' '): # 按空格键保存
# num = num + 1
# filename = "frames_%s.jpg" % num # 保存一张图像
filename = str(time.time())[:10] + ".jpg"
cv2.imwrite(filename, frame)
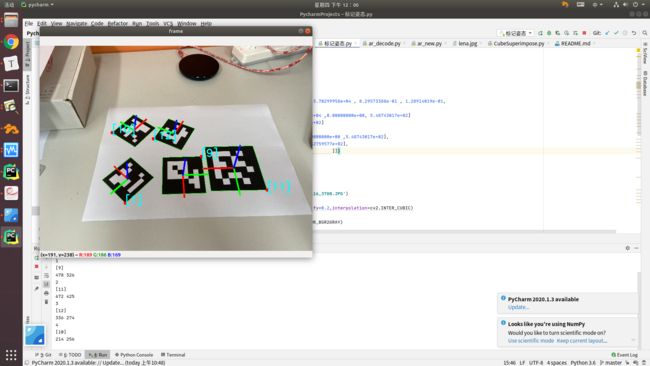
效果



博客地址:https://blog.dgut.top/2020/07/15/python-aruco/
本文参考:
1.https://blog.csdn.net/sinat_17456165/article/details/105649131
2.https://www.learnopencv.com/augmented-reality-using-aruco-markers-in-opencv-c-python/