基于力学分析的系泊系统优化设计-第三题
基于力学分析的系泊系统优化设计-第三题
本题为2016A题,原是我们组训练的题目,因在吸取前人智慧(参考文献后文以给出)的同时也加入了自己的思想,于是blog作为记录成长过程,致敬我所有队员与认真负责的老师们。
摘要
针对问题三,根据问题一所得到的模型,在原有受力分析图的基础上,考虑水流力对系泊系统的影响,重新进行受力分析,做出受力分析图;选择多目标规划模型,利用熵权法确定指标的权重,得出综合优化指标函数;接着,采用循环遍历变步长枚举法对决策变量进行遍历,满足约束条件得到不同情况下的最优解。
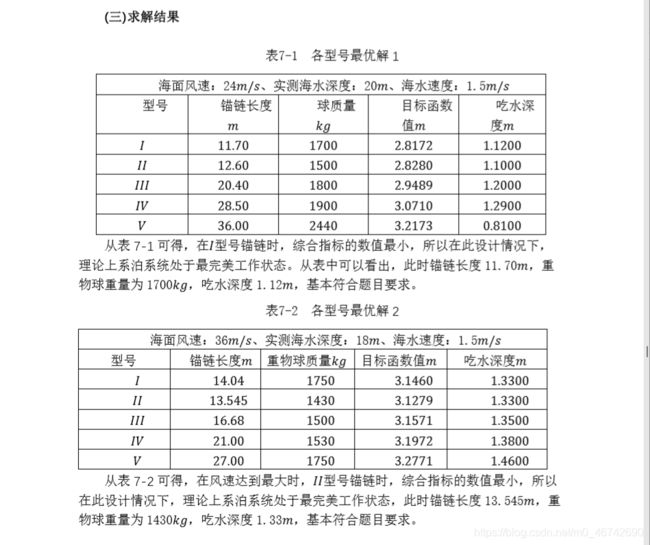
在海面风速:24m/s、实测海水深度:20m、海水速度:1.5m/s时,I型号锚链,锚链长度11.70m,重物球重量为1700kg,吃水深度1.12m为最优系泊系统设计参数。
海面风速:36m/s、实测海水深度:18m、海水速度:1.5m/s时,II型号锚链,锚链长度13.545m,重物球重量为1430kg,吃水深度1.33m为最优系泊系统设计参数。
问题重述
问题3 由于潮汐等因素的影响,布放海域的实测水深介于16m~20m之间。布放点的海水速度最大可达到1.5m/s、风速最大可达到36m/s。请给出考虑风力、水流力和水深情况下的系泊系统设计,分析不同情况下钢桶、钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。
问题分析
首先,相比较第一题而言,第三题中新加入了海水速度这一参数,那么需要对系泊系统重新进行受力分析,考虑水流力对系统的影响并建立新的数学模型。
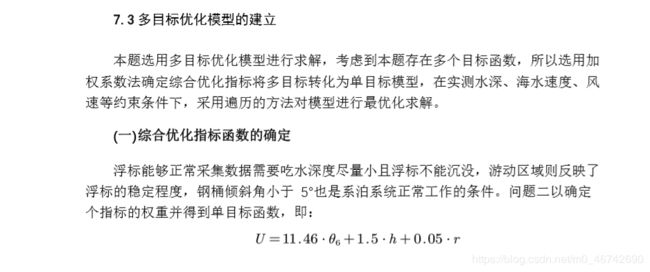
然后,在问题二多目标规划的模型基础上再增加锚链型号、锚链长度作为决策变量,通过线性加权和法将多目标规划转化为单目标规划,并在实测水深、海水速度、风速等约束条件下,对目标函数进行优化求解。
最后,分析模型的求解结果,并进行误差分析,模型校验。
模型假设
- 假设各个构件军师质量均匀的物体;
- 假设风想是平行于海平面吹拂的,海水流向于风向相同;
- 重力加速度取9.8 ,未知密度材料均设为铸铁,密度 ;
- 假设浮标一直保持水平漂浮状态,不会受海面风力的影响而发生倾斜;
- 各深度处水的流速近似相等;
- 题目给出数据均可靠有效;
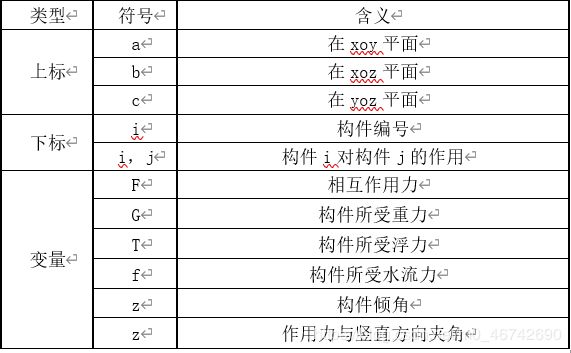
符号说明
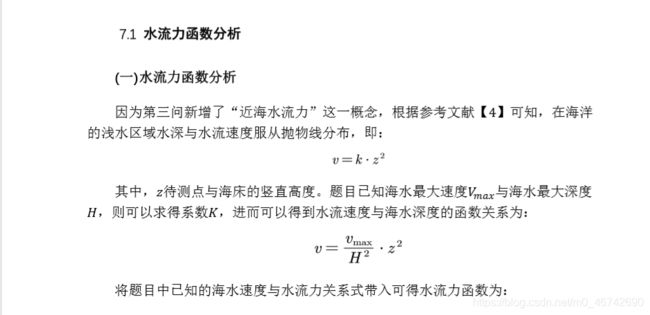
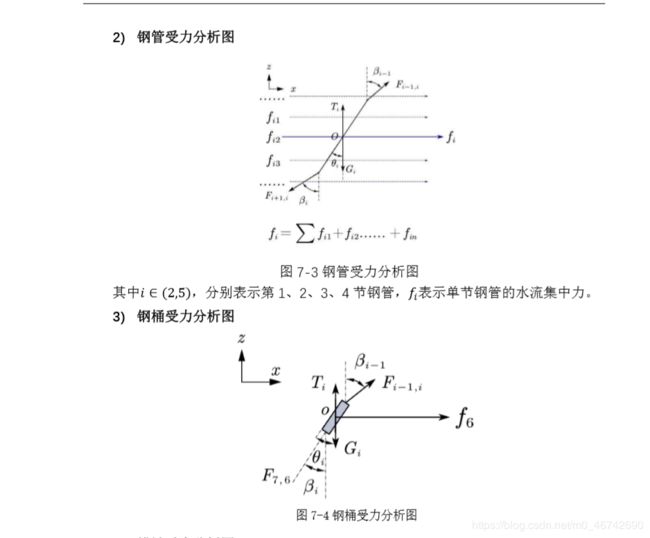
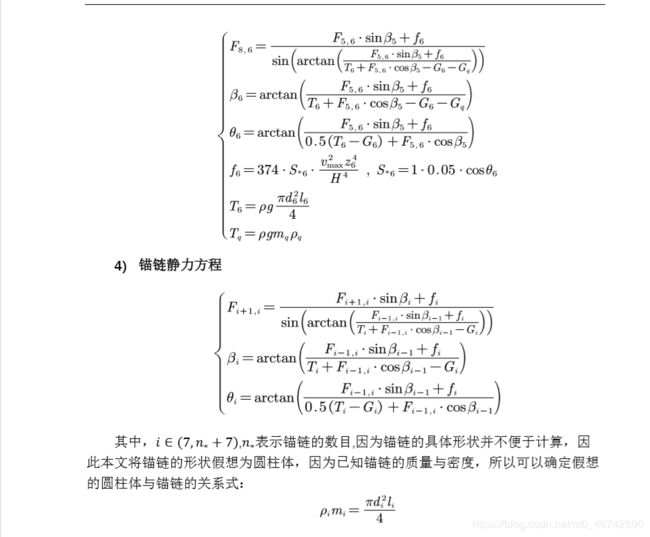
问题三模型的建立与求解









参考文献
【1】. 陈桂糖,任驰远,邓秋福,余莎,黄辉红,蒲思蓓.三维空间下系泊系统的优化设
计[J].天津科技,2018,45(02):40-41+43.
【2】. 杜丽莉,高兴宝.线性多目标规划的神经网络方法[J].陕西师范大学学报(自然
科学版),2000(04):15-18.
【3】. 朱学军,薛量,王安麟,张惠侨,叶庆泰.利用神经网络实现复杂结构的多目标
优化设计[J].机械科学与技术,2000(03):368-370.
【4】. 郝春玲,流速分布及锚链自身刚度对弹性单锚链系统变形和受力的影响,
国家 海洋局第二海洋研究所,2006-09-15
附录
第三题
clear;
clc;
min = inf;
best_h = 0;
best_mq = 0;
best_n = 0;
best_U = 0;
best_Lm_seq = 0;
% Question_three_init;
% Question_three_circle;
% n = 210; % 环链的数目为7~216,一共210个
% mq = 1200; %重物球的质量1200kg
v = 36; %海面风速
H = 18;
maolian = [0.078,0.078*3.2 ; 0.105,0.105*7 ; 0.120,0.120*12.5 ; 0.150,0.150*19.5 ; 0.180,0.180*28.12];
Lm_seq = 1 ; %锚链型号遍历
for n = 180 : 1 : 220 %锚链个数遍历
for mq = 1750 : 100 : 2500 %重物球遍历
for h = 0 : 0.01 : 2 %%吃水深度循环遍历
Ft = zeros(1,5); %%钢管对其上一节机构的作用力
alpha = zeros(1,5);%%F2,1与竖直方向的夹角
thita1 = zeros(1,4);%%钢管本身与竖直方向夹角即倾角
beta = 0;%%钢桶的倾角
Ft2 = zeros(1,n+1); %%锚链对其上一节机构的作用力
gama = zeros(1,n+1);%%锚链对其上一节机构的作用力与竖直方向的夹角
thita2 = zeros(1,n) + pi/2;%%单节锚链的倾角
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%(一),浮标
%%%海水流力
zliu = H - h;%观测点离海床的竖直高度
Fliu = 374 * 2 * h * (1.5^2)/(H^4) * (zliu^4);
%%%近海风载荷
S = 2 * (2 - h);%%浮标在风向法平面的投影面积
Ffeng = 0.625 * S * v^2;%%近海风载荷
%%%浮标所受浮力和重力
m = 1000;%%浮标的质量
rou = 1025;%%海水密度
g = 9.8;%%重力系数
V = pi * 1^2 * h;%%V:浮标在水中部分的体积
Ffu = rou * g * V;%%浮标所受的浮力
Gfu = m * g;
%%%如果浮力小于重力会沉底.排除此种情况
if Ffu - Gfu < 0
continue;
end
alpha(1) = atan( (Ffeng + Fliu) / (Ffu - Gfu));%%%beita_1
Ft(1) = sqrt( (Ffeng + Fliu)^2 + (Ffu - Gfu)^2);%%%F2,1
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%(二),钢管
Vg = 1 * pi * 0.025^2; %单个钢管的体积
Ggang = 10 * g;%每节钢管的质量
Fgfu = rou * g * Vg;%%每节钢管的所受的浮力
Sliugg = ones(1,4) * 1 * 0.05;
vliugg = [1.5/(H^2) * (H-h-0.5)^2 , 1.5/(H^2) * (H-h-1.5)^2 , 1.5/(H^2) * (H-h-2.5)^2 , 1.5/(H^2) * (H-h-3.5)^2];
Fliugg = 374 .* Sliugg .* vliugg .^ 2;
for i = 1 : 4
alpha(i+1) = atan( ((Ft(i)*sin(alpha(i)))+Fliugg(i)) / (Ft(i)*cos(alpha(i))+Fgfu-Ggang) );
Ft(i+1) = (Ft(i) * sin(alpha(i)) + Fliugg(i)) / sin(alpha(i+1));
thita1(i) = atan( (Ft(i) * sin(alpha(i)) * 1 + Fliugg(i)) / ((Fgfu-Ggang) * 1/2 + Ft(i) * cos(alpha(i))) );
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%(三),钢桶
Vt = 1 * pi * 0.15^2;%钢桶体积
Vq = mq / 7800;
Gt = 100 * g;%钢桶的重力
Gq = mq * g;%重物球的重力
Ftfu = rou * g * Vt;%%钢桶浮力
Fqfu = rou * g * Vq;%%重物球浮力
vliugt = 1.5/(H^2) * (H-h-4-0.5);
Sliugt = 1 * 0.3;
Fliugt = 374 * Sliugt * vliugt^2;
%第一节锚链而言,锚链对钢桶的作用力与其竖直方向上的夹角
gama(1)=atan( (Ft(5)*sin(alpha(5)) + Fliugt) / (Ftfu+Ft(5)*cos(alpha(5))-Gt-Gq+Fqfu) );
%Ft8,6 !!!
Ft2(1) = ( Ft(5)*sin(alpha(5)) + Fliugt ) / sin(gama(1));
%钢桶本身的倾角
beta=atan( (Ft(5)*sin(alpha(5))*1 + Fliugt ) / ((Ftfu-Gt)*1/2+Ft(5)*cos(alpha(5))*1) );
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%(四),锚链
mm = maolian(Lm_seq , 2); %0.735;%每节链环质量
roum = 6450;%每节链环密度
Vm = mm / roum;%每一节锚链的体积
Fmfu = rou * g * Vm;%锚链的浮力
Gm = mm * g; %锚链的重力
Lm = maolian(Lm_seq , 1); %0.105; %每节锚链的长度
for i = 1 : n %从第一节到第n节开始遍历
%%水流力
% vliuml = 1.5/(H^2) * ( H-h-4-1 - (Lm*(i-1)+Lm/2) );
% Sliuml = Lm * sqrt((vliuml/Lm)/pi) * 2 ;
% Fliuml = 374 * Sliuml * vliuml^2;
%单节锚链对其上一节机构的作用力与竖直方向的夹角
gama(i+1) = atan( (Ft2(i) * sin(gama(i)) ) / (Ft2(i) * cos(gama(i)) + Fmfu - Gm) );
if gama(i+1) < 0
gama(i+1) = gama(i+1) + pi;
end
%%锚链的对其上一节机构的作用力
Ft2(i+1) = (Ft2(i) * sin(gama(i))) / sin(gama(i+1));
%%单节锚链的倾角
thita2(i) = atan( (Ft2(i) * sin(gama(i)) * Lm) / ((Fmfu-Gm) * Lm/2 + Ft2(i) * cos(gama(i)) * Lm) );
if thita2(i) < 0
thita2(i) = thita2(i)+pi;
end
end
length_anchor = ones(1,n) * Lm;%单节锚链的长度矩阵
anchor_part = length_anchor .* sin(thita2);
circle_radius_anchor = sum( anchor_part(:) );
circle_radius_drum = sin(beta) * 1;
tube = sin(thita1) .* 1 ;
circle_radius_tube = sum( tube(:) );
circle_radius = circle_radius_tube + circle_radius_drum + circle_radius_anchor;
U = 1.5 * h + 0.05 * circle_radius + 11.46 * beta;
if abs(U) < min
best_h = h;
best_U = U;
min = abs(U);
best_mq = mq;
best_n = n;
best_Lm_seq = Lm_seq;
mlcd = best_n * Lm;
end
end
end
end