【Linux裸机开发】-C语言点灯
裸机开发流程
一、启动汇编代码
1.1 设置运行模式
1.2 设置SP指针
1.3 跳转到C语言
二、C代码编写
2.1 寄存器定义头文件编写
2.2 初始化驱动代码编写
三、Makefile编写
四、连接文件
一、启动汇编代码
1.1设置运行模式
I.MX6ULL芯片有 九种运行模式
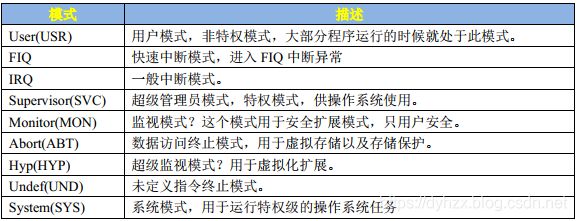
程序状态寄存器(CPSR)
所有的处理器模式都共用一个 CPSR 物理寄存器,因此 CPSR 可以在任何模式下被访问。CPSR 是当前程序状态寄存器,该寄存器包含了条件标志位、中断禁止位、当前处理器模式标志等一些状态位以及一些控制位。所有的处理器模式都共用一个 CPSR 必然会导致冲突,为此,除了 User 和 Sys 这两个模式以外,其他 7 个模式每个都配备了一个专用的物理状态寄存器,叫做 SPSR(备份程序状态寄存器),当特定的异常中断发生时, SPSR 寄存器用来保存当前程序状态寄存器(CPSR)的值,当异常退出以后可以用 SPSR 中保存的值来恢复 CPSR。

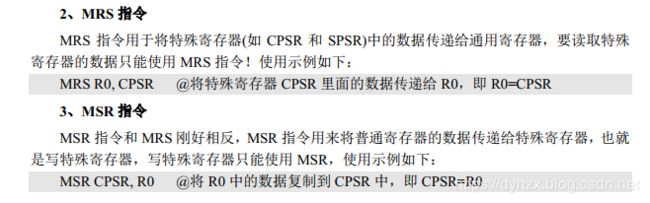
程序开发中设置SVC模式有权限访问使用内部资源,配置程序状态寄存器(CPSR)设置模式,MSR 和 MRS 两个寄存器用于读写特殊寄存器。
1.2设置SP指针
阿尔法开发板设置Sp指向DDR(512M),范围0x80000000~0x9FFFFFFF。我设置的栈大小是2MB。A7处理器栈的增长方式是向下增长的。即设置sp指向0x80200000.
1.3跳转到C语言
代码start.S
.global _start
_start:
/* 设置处理器进入SVC模式 */
mrs r0,cpsr /* 读取cpsr到R0 */
bic r0,r0,#0x1f /* 清除cpsr的bit-0-4 */
orr r0,r0,#0x13 /* 使用SVC模式 */
msr cpsr,r0 /* 将r0写入到cpsr */
/* 设置Sp指针 */
ldr sp ,=0x80200000
b main /* 跳转到C语言main函数 */
二、C代码编写
2.1寄存器定义头文件编写
main.h
#ifndef __MAIN_H
#define __MAIN_H
/* 定义要使用的寄存器 */
/*
* CCM相关寄存器 使能时钟
*/
#define CCM_CCGR0 *((volatile unsigned int *)0X020c4068)
#define CCM_CCGR1 *((volatile unsigned int *)0X020c406C)
#define CCM_CCGR2 *((volatile unsigned int *)0X020c4070)
#define CCM_CCGR3 *((volatile unsigned int *)0X020c4074)
#define CCM_CCGR4 *((volatile unsigned int *)0X020c4078)
#define CCM_CCGR5 *((volatile unsigned int *)0X020c407C)
#define CCM_CCGR6 *((volatile unsigned int *)0X020c4080)
/*
* IOMUX相关寄存器
*/
#define SW_MUX_GPIO1_IO03 *((volatile unsigned int *)0X20E0068)//复用
#define SW_PAD_GPIO1_IO03 *((volatile unsigned int *)0X20E02F4)//IO属性
/*
* GPIO_1相关寄存器地址
*/
#define GPIO1_DR *((volatile unsigned int *)0x0209c000)//高低电平
#define GPIO1_GDIR *((volatile unsigned int *)0x0209c004)//输入输出模式
#define GPIO1_PSR *((volatile unsigned int *)0x0209c008)
#define GPIO1_ICR1 *((volatile unsigned int *)0x0209c00C)
#define GPIO1_ICR2 *((volatile unsigned int *)0x0209c010)
#define GPIO1_IMR *((volatile unsigned int *)0x0209c014)
#define GPIO1_ISR *((volatile unsigned int *)0x0209c018)
#define GPIO1_EDGE_SEL *((volatile unsigned int *)0x0209c01c)
#endif
2.2 初始化驱动代码编写
main.c
#include "main.h"
/* 使能外设是时钟 */
void clk_enable(void)
{
CCM_CCGR0 = 0xffffffff;
CCM_CCGR1 = 0xffffffff;
CCM_CCGR2 = 0xffffffff;
CCM_CCGR3 = 0xffffffff;
CCM_CCGR4 = 0xffffffff;
CCM_CCGR5 = 0xffffffff;
CCM_CCGR6 = 0xffffffff;
}
/* 初始化LED */
void led_init(void)
{
SW_MUX_GPIO1_IO03 = 0x5; /* 复用为GPIO */
SW_PAD_GPIO1_IO03 = 0x10B0; /* 设置GPIO_IO03电器特性*/
GPIO1_GDIR = 0x8; /* 设置为输出 */
GPIO1_DR = 0;
}
/* 短延时 */
void delay_short(volatile unsigned int n)
{
while(n--);
}
/* 延时 */
void delay(volatile unsigned int n)//延时ms
{
while(n--)
{
delay_short(0x7ff);
}
}
void led_on(void)
{
GPIO1_DR &= ~(1<<3);
}
void led_off(void)
{
GPIO1_DR |= (1<<3);
}
int main(void)
{
/* 初始化LED */
clk_enable();
led_init();
/* 设置LED闪烁 */
while(1)
{
led_on();
delay(500);
led_off();
delay(500);
}
return 0;
}
2.3寄存器结构体的编写
1.定义结构体,寄存器组
/** GPIO - Register Layout Typedef */
typedef struct {
__IO uint32_t DR; /**< GPIO data register, offset: 0x0 */
__IO uint32_t GDIR; /**< GPIO direction register, offset: 0x4 */
__I uint32_t PSR; /**< GPIO pad status register, offset: 0x8 */
__IO uint32_t ICR1; /**< GPIO interrupt configuration register1, offset: 0xC */
__IO uint32_t ICR2; /**< GPIO interrupt configuration register2, offset: 0x10 */
__IO uint32_t IMR; /**< GPIO interrupt mask register, offset: 0x14 */
__IO uint32_t ISR; /**< GPIO interrupt status register, offset: 0x18 */
__IO uint32_t EDGE_SEL; /**< GPIO edge select register, offset: 0x1C */
} GPIO_Type;
2.定义基地址、定义宏
/** Peripheral GPIO1 base address */
#define GPIO1_BASE (0x209C000u)
/** Peripheral GPIO1 base pointer */
#define GPIO1 ((GPIO_Type *)GPIO1_BASE)
/** Peripheral GPIO2 base address */
#define GPIO2_BASE (0x20A0000u)
/** Peripheral GPIO2 base pointer */
#define GPIO2 ((GPIO_Type *)GPIO2_BASE)
/** Peripheral GPIO3 base address */
#define GPIO3_BASE (0x20A4000u)
/** Peripheral GPIO3 base pointer */
#define GPIO3 ((GPIO_Type *)GPIO3_BASE)
/** Peripheral GPIO4 base address */
#define GPIO4_BASE (0x20A8000u)
/** Peripheral GPIO4 base pointer */
#define GPIO4 ((GPIO_Type *)GPIO4_BASE)
/** Peripheral GPIO5 base address */
#define GPIO5_BASE (0x20AC000u)
/** Peripheral GPIO5 base pointer */
#define GPIO5 ((GPIO_Type *)GPIO5_BASE)
三、Makefile编写
Makefile
objs:=start.o main.o
ledc.bin:$(objs)
arm-linux-gnueabihf-ld -Timx6ull.lds $^ -o ledc.elf
arm-linux-gnueabihf-objcopy -O binary -S ledc.elf $@
arm-linux-gnueabihf-objdump -D -m arm ledc.elf > ledc.dis
%.o:%.S
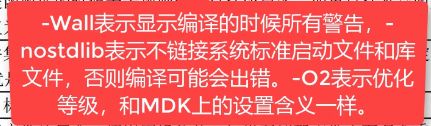
arm-linux-gnueabihf-gcc -Wall -nostdlib -c -O2 -o $@ $<
%.o:%.c
arm-linux-gnueabihf-gcc -Wall -nostdlib -c -O2 -o $@ $<
clean:
rm -rf *.o ledc.bin ledc.elf ledc.dis
- start.o 在 main.o的前面,因为 start.o 是最先要执行的文件!
- 自动化变量的熟悉使用

四、连接文件
用于描述文件应该如何被链接在一起形成最终的可执行文件。其主要目的是描述输入文件中的段如何被映射到输出文件中,并且控制输出文件中的内存排布。最简单的链接脚本可以只包含一个命令“SECTIONS”,我们可以在这一个“SECTIONS”里面来描述输出文件的内存布局。我们一般编译出来的代码都包含在 text、 data、 bss 和 rodata 这四个段内。
SECTIONS{
. = 0x87800000;
.text :
{
start.o
*(.text)
}
.rodata ALIGN(4) : {*(.rodata)}
.data ALIGN(4) : {*(.data)}
. = ALIGN(4);
__bss_start = . ;
.bss ALIGN(4) : {*(bss) *(COMMON)}
__bss_end = . ;
}