LINUX-I.MX6U从零开始之2.0--移植Linux操作系统
目录
- 一,概述
- 二,uboot制作
- 2.1 uboot下载
- 2.2 uboot测试
- 2.2.1 安装 ncurses 库
- 2.2.2 改顶层Makefile(和2.2.3二选一即可)
- 2.2.3 创建shell 脚本(和2.2.2二选一即可)
- 2.3 uboot中添加自己的开发板
- 2.3.1 configs 目录下
- 2.3.2. include/configs 目录下
- 2.3.3 board/freescale 目录下
- 2.4 U-Boot 图形界面
- 2.4.1 配置LCD屏
- 2.4.2 配置网络驱动
- 2.4.3 U-Boot 图形化配置
- 三,移植linux系统
- 3.1 Linux 内核获取
- 3.2 Linux 修改
- 3.2.1 编译内核
- 3.2.2 添加开发板
- 3.2.3 开发板配置
- 四,根文件系统构建
- 4.1 修改
- 4.1.1 配置makefile
- 4.1.2 中文字符支持
- 4.1.3 配置 busybox
- 4.1.4 向 rootfs 添加库文件
- 4.2 烧录
- 4.2.1 MfgTool 工具烧录
- 4.2.2 MfgTool 改造
- 附录一
- 1.1 uboot指令
- 1.2 检查
个人学习笔记,仅供参考。
硬件是正点原子的imx6ull的开发板。
一,概述
1.用NXP提供的MfgTool工具烧写,通过 USB OTG 口来烧写系统。
2.烧写需要准备四个文件:
2.1 uboot 可执行文件:u-boot-imx6ull14x14evk_emmc.imx
2.2 zImage 镜像文件:zImage(LINUX系统镜像)
2.3 开发板对应的.dtb(设备树):zImage-imx6ull-14x14-evk-emmc.dtb
2.4 根文件系统 rootfs:rootfs_nogpu.tar.bz2(压缩文件)
二,uboot制作
Linux 系统要启动就必须需要一个 bootloader 启动程序,其中有 U-Boot、vivi、RedBoot 等,其中以 U-Boot 使用最为广泛。
2.1 uboot下载
uboot有三种下载方式:
- uboot 官网下载
http://www.denx.de/wiki/U-Boot/
一般不会直接用 uboot 官方的 U-Boot 源码的,uboot 官方的 uboot 源码是给半导体厂商准备的。 - 半导体厂商维护的 uboot(imx6ull是NXP)
http://git.freescale.com/git/cgit.cgi/imx/uboot-imx.git/tag/?h=imx_v2016.03_4.1.15_2.0.0_ga&id=rel_imx_4.1.15_2.1.0_ga - 开发板厂家提供 (如正点原子)
2.2 uboot测试
用NXP官方的 uboot-imx-rel_imx_4.1.15_2.1.0_ga.tar.bz2
2.2.1 安装 ncurses 库
Ubuntu 中安装 ncurses 库,否则编译会报错。
sudo apt-get install libncurses5-dev
2.2.2 改顶层Makefile(和2.2.3二选一即可)
249-250行插入这个,省的每次编译 uboot 的时候都要在 make 命令后面设置ARCH 和 CROS_COMPILE
ARCH ?= arm
CROSS_COMPILE ?=arm-linux-gnueabihf-
2.2.3 创建shell 脚本(和2.2.2二选一即可)
新建名为 mx6ull_alientek_emmc.sh 的 shell 脚本文件。
#!/bin/bash
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- distclean
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- mx6ull_14x14_evk_emmc_defconfig
make V=1 ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- -j16
编译:
chmod 777 mx6ull_alientek_emmc.sh
./mx6ull_alientek_nand.sh
然后可以烧到SD卡中看看,附录一 1.2 有几个检测指令(boot)可以试试。
2.3 uboot中添加自己的开发板
2.3.1 configs 目录下
复制 mx6ull_14x14_evk_emmc_defconfig,然后重命名为 mx6ull_alientek_emmc_defconfig。
//第一行第四行改一下
CONFIG_SYS_EXTRA_OPTIONS="IMX_CONFIG=board/freescale/mx6ull_alientek_emmc/imximage.cfg,MX6ULL_EVK_EMMC_REWORK"
CONFIG_ARM=y
CONFIG_ARCH_MX6=y
CONFIG_TARGET_MX6ULL_ALIENTEK_EMMC=y
CONFIG_CMD_GPIO=y
2.3.2. include/configs 目录下
复 制include/configs/mx6ullevk.h,并重命名为 mx6ull_alientek_emmc.h
将:
#ifndef __MX6ULLEVK_CONFIG_H
#define __MX6ULLEVK_CONFIG_H
改为:
#ifndef __MX6ULL_ALIENTEK_EMMC_CONFIG_H
#define __MX6ULL_ALIENTEK_EMMC_CONFIG_H
2.3.3 board/freescale 目录下
复制 mx6ullevk,将其重命名为 mx6ull_alientek_emmc
将 其 中 的 mx6ullevk.c 文 件 重 命 名 为mx6ull_alientek_emmc.c
将 mx6ull_alientek_emmc 下的 Makefile 文件:
obj-y := mx6ull_alientek_emmc.o//第六行改一下
imximage.cfg 文件:
PLUGIN board/freescale/mx6ull_alientek_emmc /plugin.bin 0x00907000
Kconfig 文件:
if TARGET_MX6ULL_ALIENTEK_EMMC
config SYS_BOARD
default "mx6ull_alientek_emmc"
config SYS_VENDOR
default "freescale"
config SYS_SOC
default "mx6"
config SYS_CONFIG_NAME
default "mx6ull_alientek_emmc"
endif
MAINTAINERS 文件:
MX6ULL_ALIENTEK_EMMC BOARD
M: Peng Fan <peng.fan@nxp.com>
S: Maintained
F: board/freescale/mx6ull_alientek_emmc/
F: include/configs/mx6ull_alientek_emmc.h
2.4 U-Boot 图形界面
arch/arm/cpu/armv7/mx6/Kconfig
//在 207 行加入如下内容:
config TARGET_MX6ULL_ALIENTEK_EMMC
bool "Support mx6ull_alientek_emmc"
select MX6ULL
select DM
select DM_THERMAL
//在最后一行的 endif 的前一行添加
source "board/freescale/mx6ull_alientek_emmc/Kconfig"
grep -nR “mx6ull_alientek_emmc.h”
如果编译后执行这个指令会出现很多mx6ull_alientek_emmc.h,那就算是添加成功了
2.4.1 配置LCD屏
我买的屏是原子的4.3寸屏,以此举例:
- 打开board/freescale/mx6ull_alientek_emmc/mx6ull_alientek_emmc.c
struct display_info_t const displays[] = {{
.bus = MX6UL_LCDIF1_BASE_ADDR,
.addr = 0,
.pixfmt = 24,
.detect = NULL,
.enable = do_enable_parallel_lcd,
.mode = {
.name = "TFT4342",
.xres = 480,
.yres = 272,
.pixclock = 108695,//这个我没改,但是显示屏能用。。。
.left_margin = 40, //HBPD
.right_margin = 5, //HFPD
.upper_margin = 8, //VBPD
.lower_margin = 8, //VFBD
.hsync_len = 1, //HSPW
.vsync_len = 1, //VSPW
.sync = 0,
.vmode = FB_VMODE_NONINTERLACED
} } };
参照着改吧。


顺便把板子名字改一下
int checkboard(void)
{
if (is_mx6ull_9x9_evk())
puts("Board: MX6ULL 9x9 EVK\n");
else
puts("Board: MX6ULL ALIENTEK EMMC\n");
return 0;
}
- 打开include/configs/mx6ull_alientek_emmc.h
panel=TFT43AB
//将其改为:
panel=TFT7016 //有两行
- 修改uboot
烧到内存卡卡,启动uboot
setenv panel TFT7016
saveenv
然后重启,OK。
2.4.2 配置网络驱动
呵,没网线,下次一定。
2.4.3 U-Boot 图形化配置
需要 ncurses 库支持
sudo apt-get install build-essential
sudo apt-get install libncurses5-dev
.config 文件保存着 uboot 的配置项。Kconfig文件是图形界面的描述文件。
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- mx6ull_alientek_emmc_defconfig//清一下工程
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- menuconfig//打开图像配置界面
注意!!!
图形化配置的话不要使用./mx6ull_alientek_emmc.sh,会删掉.config 文件!
用这个:
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- -j16
三,移植linux系统
启动 Linux 内核的方法,一种是直接从 EMMC 启动,一种是从网络启动。
网络没配,下次一定。
用emmc吧,先查一下emmc里有没有zImage 文件和设备树文件。
ls mmc 1:1
有的话可以尝试启动,没有就去移植一个。
setenv bootargs 'console=ttymxc0,115200 root=/dev/mmcblk1p2 rootwait rw'//不行的话看看是不是有空格
setenv bootcmd 'mmc dev 1; fatload mmc 1:1 80800000 zImage; fatload mmc 1:1 83000000 imx6ull-14x14-evk.dtb; bootz 80800000 - 83000000;'//我的是imx6ull-14x14-evk.dtb,看着改
saveenv//记得保存参数
boot//启动
ubuntu安装库:
sudo apt-get install lzop
3.1 Linux 内核获取
Linux 官网为 https://www.kernel.org
NXP从linux官网下载内核后移植版本也有,要自己去找,我用的就是NXP移植版linux-imx-4.1.15-2.1.0-g8a006db.tar.bz2。
3.2 Linux 修改
3.2.1 编译内核
1.先清一下内核:make clean
2.再配置一下内核:make imx_v7_mfg_defconfig
3.编译一下内核:make -j16
zImage 镜像文件:arch/arm/boot/zImage
.dtb(设备树)文件:arch/arm/boot/dts/mx6ull-14x14-evk.dtb
3.2.2 添加开发板
- 配置内核
arch/arm/configs 目录:imx_v7_mfg_defconfig复制重命名为imx_alientek_emmc_defconfig
以后配置内核就:
make imx_alientek_emmc_defconfig - 添加设备树
arch/arm/boot/dts目录:
imx6ull-14x14-evk.dts复制重命名imx6ull-alientek-emmc.dts - makefile
arch/arm/boot/dts目录:
打开makefile
“ dtb-$(CONFIG_SOC_IMX6ULL)”配置项,在此配置项中加入“imx6ull-alientek-emmc.dtb” - mx6ull_alientek_emmc.sh
#!/bin/bash
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- distclean
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- imx_alientek_emmc_defconfig
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- menuconfig
make V=1 ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- all -j16
3.2.3 开发板配置
是把系统烧到板子上,在终端配置,不会烧往下看,再回来配置。
四,根文件系统构建
BusyBox官网地址为:https://busybox.net/
自用1.29.0 版本的 BusyBox,busybox-1.29.0.tar.bz2
4.1 修改
建个文件夹 解压。
4.1.1 配置makefile
顶层 Makefile:
CROSS_COMPILE ?= /usr/local/arm/gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabihf/bin/arm-linux-gnueabihf-
ARCH ?= arm
4.1.2 中文字符支持
busybox中的 shell 命令对中文输入即显示做了限制,修改 busybox 源码,取消限制。
- libbb/printable_string.c
第 31 和 32 行,当字符大于 0X7F 以后就跳出去了。
第 45 和 46 行,如果支持 UNICODE 码的话,当字符大于 0X7F 就直接输出‘?’。
/* 注释掉下面这个两行代码 */
/* if (c >= 0x7f)
break; */
...
/* 修改下面代码 */
/* if (c < ' ' || c >= 0x7f) */
if( c < ' ')
*d = '?';
- libbb/unicode.c
第 1022 行,当字符大于 0X7F 以后,*d++就为‘?’。
第 1030 和 1031 行,当字符大于 0X7F 以后,*d 也为‘?’。
/* 修改下面一行代码 */
/**d++ = (c >= ' ' && c < 0x7f) ? c : '?';*/
*d++ = (c >= ' ') ? c : '?';
...
/* 修改下面一行代码 */
/*if (c < ' ' || c >= 0x7f)*/
if(c < ' ')
*d = '?';
4.1.3 配置 busybox
//执行
make defconfig
make menuconfig
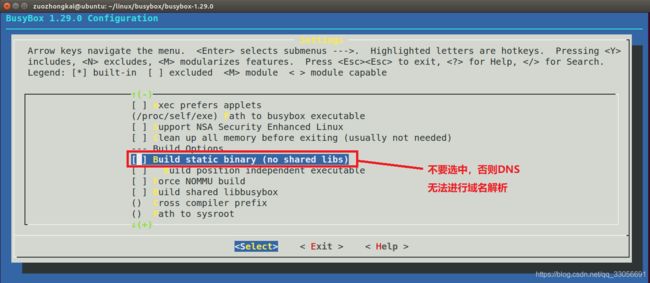
- Build static binary (no shared libs)(不要勾选)
Location:-> Settings-> Build static binary (no shared libs)
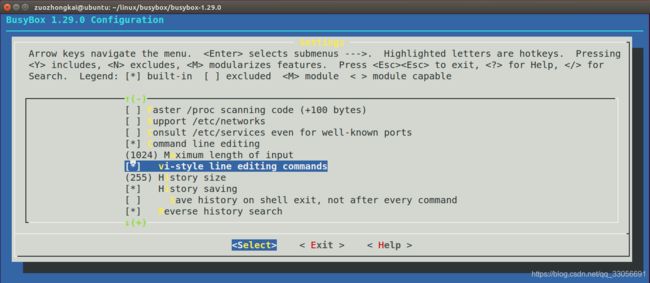
- vi-style line editing commands(勾选)
Location:-> Settings-> vi-style line editing commands
- Simplified modutils(不要勾选)
Location:-> Linux Module Utilities-> Simplified modutils

- mdev (16 kb)(勾选)
Location:-> Linux System Utilities-> mdev (16 kb) //确保下面的全部选中,默认都是选中的

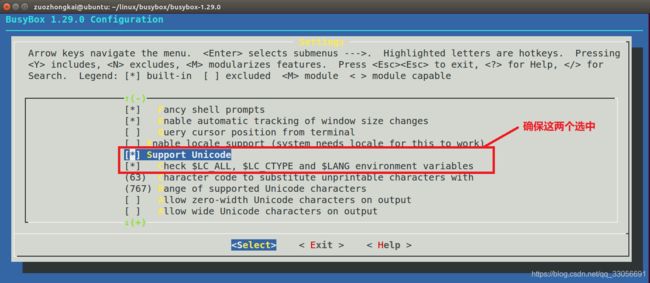
- Check $LC_ALL, $LC_CTYPE and $LANG environment variables(勾选)
Location:-> Settings-> Support Unicode //选中-> Check $LC_ALL, $LC_CTYPE and $LANG environment variables //选中
主目录下新建文件夹rootfs
执行命令 make install CONFIG_PREFIX=/home/weser/Desktop/linux/rootfs_linux/busybox-1.29.0/rootfs
如果有问题,反思一下是不是路径错了

4.1.4 向 rootfs 添加库文件
- rootfs/lib
mkdir lib //新建文件夹
//然后复制交叉编译器库文件
//要看你安装的在哪
cd /usr/local/arm/gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabihf/arm-linux-gnueabihf/libc/lib //进入文件夹
//*so*(*是通配符)和.a 文件,这些就是库文件
cp *so* *.a /home/weser/Desktop/linux/rootfs_linux/busybox-1.29.0/rootfs/lib/ -d //复制到新建的文件夹lib下
cd /home/weser/Desktop/linux/rootfs_linux/busybox-1.29.0/rootfs/lib/ //进入文件夹
ls ld-linux-armhf.so.3 -l //查看ld-linux-armhf.so.3的信息
//ld-linux-armhf.so.3有个->标识,代表这个东西是个快捷键
rm ld-linux-armhf.so.3 //删了
cd /usr/local/arm/gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabihf/arm-linux-gnueabihf/libc/lib //进入文件夹
cp ld-linux-armhf.so.3 /home/weser/Desktop/linux/rootfs_linux/busybox-1.29.0/rootfs/lib/ //把ld-linux-armhf.so.3复制过去
//有兴趣可以回去看看,->标识没了,大小724392B,这里就不写了
cd /usr/local/arm/gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabihf/arm-linux-gnueabihf/lib //换个文件夹继续复制
cp *so* *.a /home/weser/Desktop/linux/rootfs_linux/busybox-1.29.0/rootfs/lib/ -d //继续复制*so*和.a
//复制完了
效果图:

2. rootfs/usr/lib
cd /home/weser/Desktop/linux/rootfs_linux/busybox-1.29.0/rootfs/usr/ //在这个文件夹里
mkdir lib //新建文件夹
cd /usr/local/arm/gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabihf/arm-linux-gnueabihf/libc/usr/lib //打开文件夹
cp *so* *.a /home/weser/Desktop/linux/rootfs_linux/busybox-1.29.0/rootfs/usr/lib/ -d //复制
//进入rootfs根目录
du ./lib ./usr/lib/ -sh //查看 lib 和 usr/lib 这两个目录的大小
rootfs/usr/lib文件夹:
 目录大小:
目录大小:

- rootfs/其它文件夹
mkdir dev proc mnt sys tmp root etc
- /etc/init.d/rcS
在 rootfs 中创建/etc/init.d/rcS 文件
rcS 是个 shell 脚本, Linux 内核启动以后需要启动一些服务,而 rcS 就是规定启动哪些文件的脚本文件。
#!/bin/sh
PATH=/sbin:/bin:/usr/sbin:/usr/bin
LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/lib:/usr/lib
runlevel=S
umask 022
export PATH LD_LIBRARY_PATH runlevel
mount -a
mkdir /dev/pts
mount -t devpts devpts /dev/pts
echo /sbin/mdev > /proc/sys/kernel/hotplug
mdev -s
#开机自启动
cd /weser
./hello &
cd /
赋予执行权限:chmod 777 rcS
- /etc/fstab
rootfs 中创建/etc/fstab 文件
fstab 在 Linux 开机以后自动配置哪些需要自动挂载的分区
#
proc /proc proc defaults 0 0
tmpfs /tmp tmpfs defaults 0 0
sysfs /sys sysfs defaults 0 0
- /etc/inittab
rootfs 中创建/etc/inittab 文件
启动进程的控制 tty
#etc/inittab
::sysinit:/etc/init.d/rcS
console::askfirst:-/bin/sh
::restart:/sbin/init
::ctrlaltdel:/sbin/reboot
::shutdown:/bin/umount -a -r
::shutdown:/sbin/swapoff -a
- hello.c
在rootfs 中创建weser文件夹,自己程序可以放这里
rootfs 中创建/weser/hello.c 文件
#include 编译:arm-linux-gnueabihf-gcc hello.c -o hello
- 打包文件系统
cd rootfs/
tar -vcjf rootfs.tar.bz2 *
到这来就可以了。
4.2 烧录
4.2.1 MfgTool 工具烧录
MfgTool 工具是 NXP 提供的专门用于给 I.MX 系列 CPU 烧写系统的软件,可以在 NXP 官网下载到。
解压L4.1.15_2.0.0-ga_mfg-tools.tar.gz
解压后打开 L4.1.15_2.0.0-ga_mfg-tools。
解压: mfgtools-with-rootfs.tar.gz(不带 rootfs)
常用的VBS就这几个,其他可以删了。
 把前面配置好的四个文件拷到windows环境下,并改名
把前面配置好的四个文件拷到windows环境下,并改名
 firmware,files目录原本有的全部删掉,然后:
firmware,files目录原本有的全部删掉,然后:
- zImage、u-boot-imx6ull14x14evk_emmc.imx 和 zImage-imx6ull-14x14-evk-emmc.dtb 这三个文件拷贝到 mfgtools-with-rootfs/mfgtools/Profiles/Linux/OS Firmware/firmware 目录中。
- 上面四个文件都拷贝到mfgtools-with-rootfs/mfgtools/Profiles/Linux/OS Firmware/files目录中。
我用的是emmc,所以点击mfgtool2-yocto-mx-evk-emmc.vbs
开发板是usb模式,读到设备后烧写。
然后开发板切换到emmc模式。
打开串口:
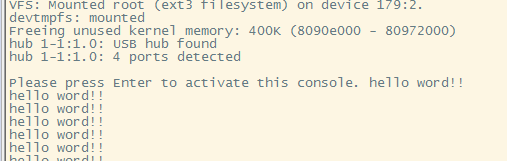
到这就移植完了。下面是MfgTool 优化。
对了,想要停止hello word任务的话,输入ps
然后看看是哪个进程
然后: kill -9 61(我的进程是61)
4.2.2 MfgTool 改造
看了一下发现没什么必要,算了,回头找个网线再把网络配置补上吧。。
附录一
1.1 uboot指令
1.1.1 ? 查询指令
1.1.2 bdinfo 查看板子信息
1.1.3 printenv 输出环境变量信息
1.1.4 version 查看 uboot 的版本号
1.1.5 setenv 用于设置或者修改环境变量的值
1.1.6 saveenv 用于保存修改后的环境变量
将环境变量 bootdelay 改为 5
//boot切换linux的时间延时:
setenv bootdelay 5
saveenv
//环境变量值有空格:
setenv bootargs 'console=ttymxc0,115200 root=/dev/mmcblk1p2 rootwait rw'
saveenv
//新建环境变量
setenv author zuozhongkai
saveenv
//删除环境变量
setenv author
saveenv
1.1.7 内存操作命令
直接对 DRAM 进行读写操作的: md、nm、mm、mw、cp 和 cmp。
1.1.8 网络操作命令

setenv ipaddr 192.168.1.50
setenv ethaddr 00:04:9f:04:d2:35
setenv gatewayip 192.168.1.1
setenv netmask 255.255.255.0
setenv serverip 192.168.1.250
saveenv
1.1.9 EMMC 和 和 SD 卡操作命令
MMC 设备的命令为“mmc”
1.1.10 FAT 格式文件系统操作命令
fatinfo、fatls、fstype、fatload 和 fatwrite 只支持 FAT 格式的文件系统! !
1.1.11 EXT 格式文件系统操作命令
uboot 有 ext2 和 ext4 这两种格式的文件系统的操作命令,常用的就四个命令,分别为:ext2load、ext2ls、ext4load、ext4ls 和 ext4write。
1.1.12 NAND 操作命令
? nand 自己去看
1.1.13 BOOT 操作命令
bootz、bootm 和 boot
其他,比如 reset、go、run 和 mtest 等。
1.2 检查
检查一下 SD 卡和 EMMC 驱动是否正常:mmc list
//检查设备0 设备1
mmc dev 0
mmc info
mmc dev 1
mmc info