MTK sensor 框架
文章目录
- 前言
- 安卓框架图
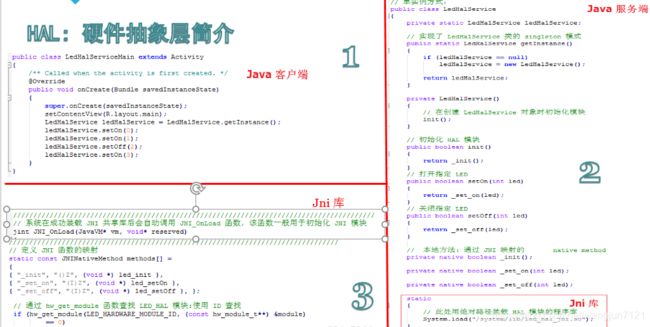
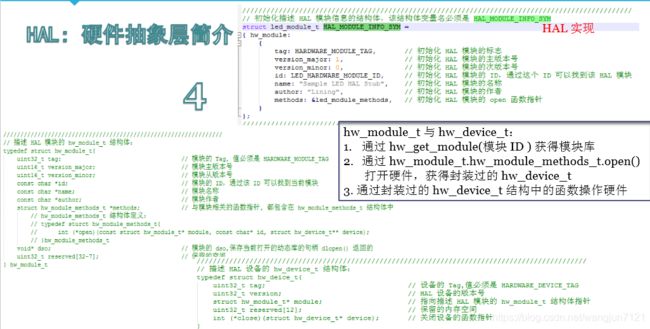
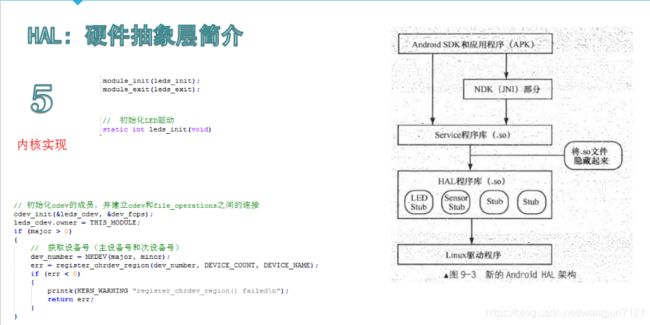
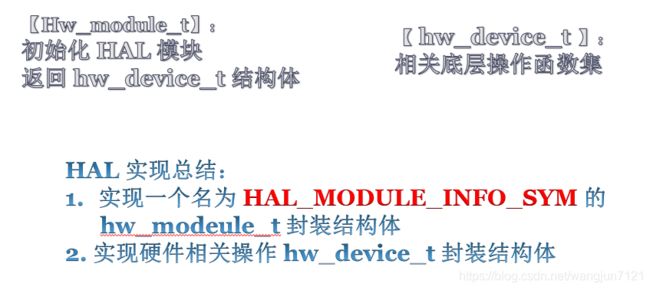
- HAL 框架
- Sensor 服务启动
- 驱动框架图
- MTK 通用模块实现
- 初始化
- 获得数据
- 应用层接口
- 通过 sys 节点启动传感器
- 定时器->工作队列->get_data()->input
- MTK 通用模块提供接口
- 第三方驱动实现
- 初始化
- I2C 匹配
- 备注:
- 问题 1
- 问题 2
- Ps 距离上报 10cm 流程
前言
因为喜欢用文件记录代码调用流程及总结什么的,画 uml 图什么的实现是懒的画了,直接上传源码总结吧,先传几张图欣赏下吧,感觉有需要就下载源码自己跟下流程吧,如果喜欢这种风格的的话,请点赞[笑脸]
##源码环境
mtk 6582 + android 4.4
安卓框架图
安卓框架图:
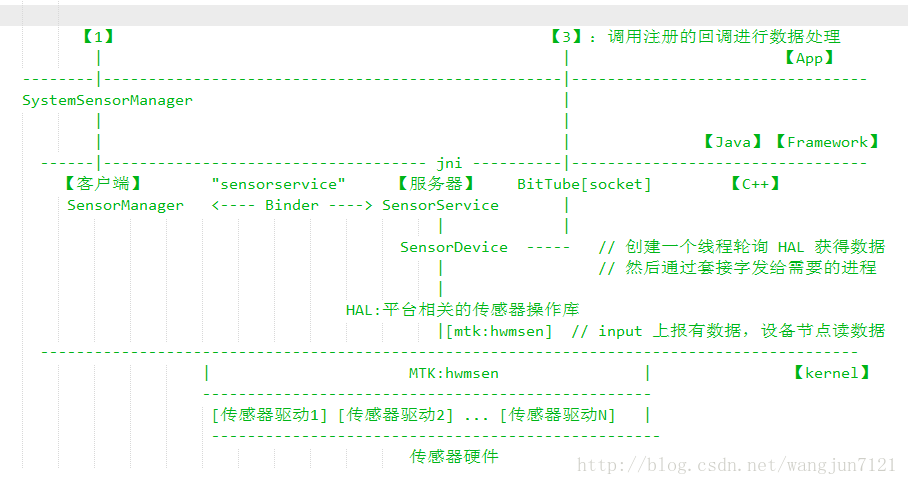
android app 操作sensor 流程:
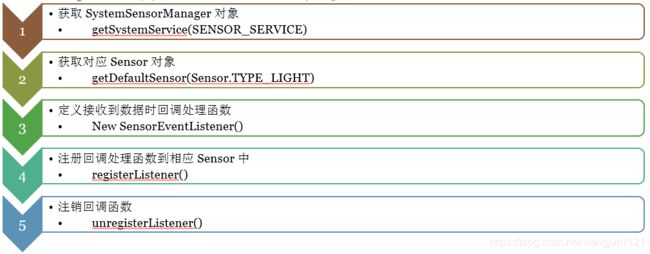
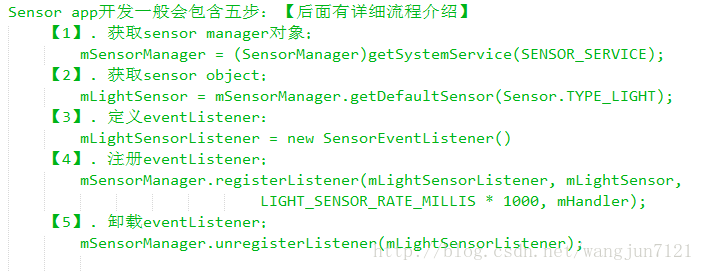
1. 获取 sensor manager 对象;
/////////////////////////////////////////////////////////////////////////////////
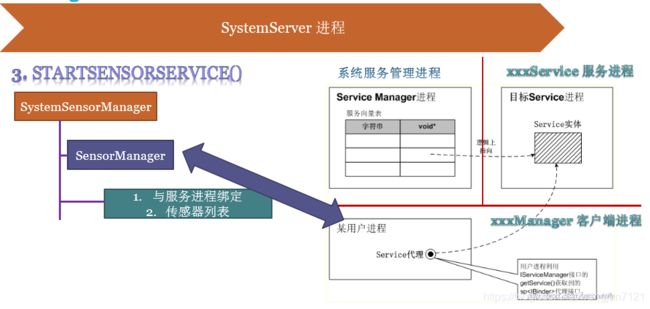
// 此函数会创建一个 SystemSensorManager 对象,上面有介绍,他会调用 SensorManger
// 通过 Binder 请求 SensorService 服务返回【传感器列表】, 保存在 SystemSensorManager 中
// 代码调用路径:
// xxx.apk
// ContextImpl.java // app 都有的 Context 参数实现,这是创建 activity 时创建的
// SystemServiceRegistry.java // 此类的静态代码块中注册各种服务
mSensorManager = (SensorManager)getSystemService(SENSOR_SERVICE);
2. 获取 sensor object;
/////////////////////////////////////////////////////////////////
// 查找第一步获得的传感器列表,返回对应的传感器的 Sensor 类对象
mLightSensor = mSensorManager.getDefaultSensor(Sensor.TYPE_LIGHT);
3. 定义 eventListener:
////////////////////////////////////////////////////////////
// 定义了 SensorEventListener 类接口,主要主要是重写了 onSensorChanged()
// 和 onAccuracyChanged() 方法,当所监听的sensor有数据上报会自动调用
// onSensorChanged() 进行处理。这里的 handleLightSensorEvent() 就是用来
// 处理 light sensor 上报的数据。
private final SensorEventListener mLightSensorListener = new SensorEventListener() {
@Override
public void onSensorChanged(SensorEvent event) {
if (mLightSensorEnabled) {
final long time = SystemClock.uptimeMillis();
final float lux = event.values[0];
handleLightSensorEvent(time, lux);
}
}
@Override
public void onAccuracyChanged(Sensor sensor, int accuracy) {
// Not used.
}
};
4. 注册 eventListener;
////////////////////////////////////////////////////////////////
// 函数会一直调用到 C++ 层,创建一个套接字,接收 SensorService 发
// 过来的传感器数据,然后一层层调用,最后调用注册的监听函数处理传感器数据
// 代码调用路径:
// xxx.apk 中
// SensorManager.java // 他是 SystemSensorManager 的父类,按接口编程
// SystemSensorManager.java
// SensorEventQueue.java
// SystemSensorManager.java // 初始化父类 BaseEventQueue
// -------------------- jni -----------------------------------------------------------------
// android_hardware_SensorManager.cpp
// SensorManager.cpp // 在这里注册一个套接字接收 Sensor 发来的数据
// 收到数据处理流程:
// android_hardware_SensorManager.cpp // Recevicer::handleEvent()
// SystemSensorManager.java // app 覆写的:onAccuracyChanged()/onSensorChanged()
mSensorManager.registerListener(mLightSensorListener, mLightSensor, LIGHT_SENSOR_RATE_MILLIS * 1000, mHandler);
5. 卸载 eventListener;
////////////////////////////////////////////////////////////////////////////////
// 调用类路径为:
// SensorManager.java
// SystemSensorManager.java
// ------------------- jni ------------------------------------------------------------
// android_hardware_SensorManager.cpp
// SensorEventQueue.cpp // 用来管理 sensor 上报的事件的
// SensorEventConnection.cpp // SensorEventConnection 类,管理 Sensor 连接的
// SensorService.cpp
// SensorInterface.cpp
// SensorDevice.cpp
// Sensors.c
// Nusensors.cpp
// Acceleration.cpp
// -------------------- kernel -------------------------------------------------------------------
// accel.c // MTK 封装的加速度传感器框架文件
// mc3413.c // 第三方实现的具体的传感器驱动文件
mSensorManager.unregisterListener(mLightSensorListener);
HAL 框架
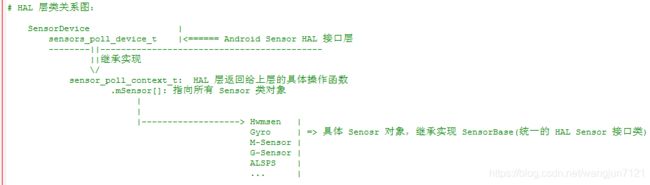




Sensor 服务启动


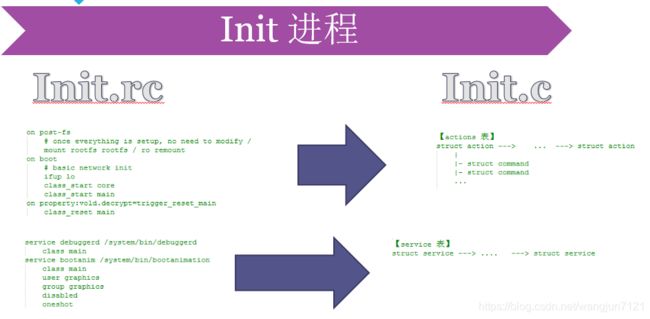

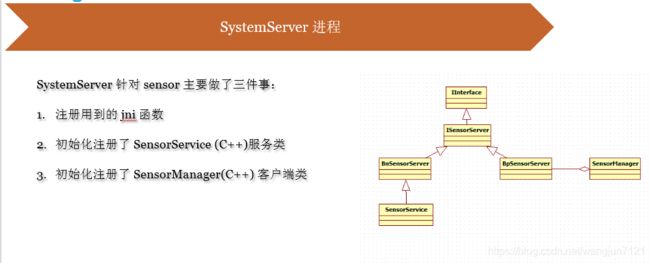
// 【Sensor 初始化流程】:
// 初始化文件路径:
// Init.cpp // init 进程:system\core\init
// App_main.cpp // zygote 进程:frameworks\base\cmds\app_process
// AndroidRuntime.cpp
// ZygoteInit.java // :frameworks/base/core/java/com/android/internal/os
// RuntimeInit.java // 抛出异常: frameworks\base\core\java\com\android\internal\os
// ----------------------------------------------------------------
// SystemServer.java // systemserver 进程: 是 zygote 子进程:frameworks\base\services\java\com\android\server
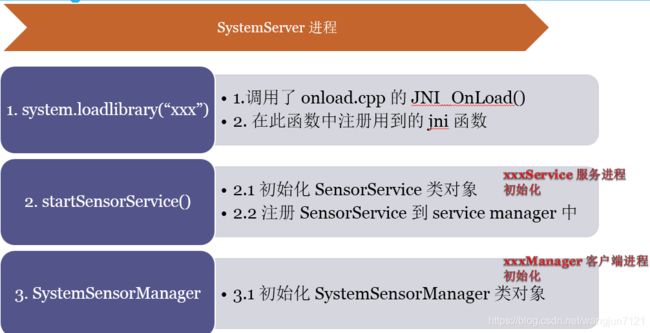
// Onload.cpp // 注册一些 jni, 如硬件访问服务的: frameworks\base\services\jni
// --- jni -----------------------------
// com_android_server_SystemServer.cpp // 初始化 C++ 层的 sensor 服务端:frameworks\base\services\jni
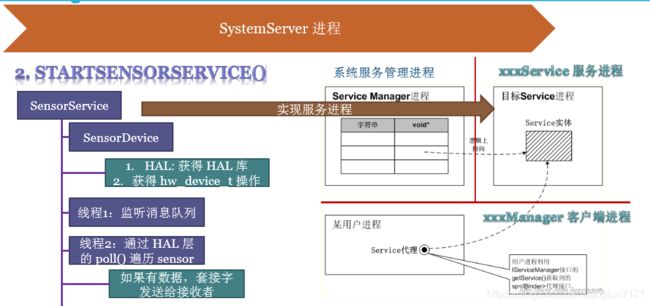
// SensorService.h // SensorService(C++) 类初始化:提交 Binder 服务:frameworks\native\services\sensorservice
// SensorService.cpp
// SensorDevice.cpp // SensorDevice(C++) 类初始化:与 HAL 层打交道: frameworks\native\services\sensorservice
// --------- 下调 HAL 实现 ----------------
// Sensors.c // 【HAL实现】MTK 创建的 Sensors.c,HAL 层文件,与具体传感器实现打交道:vendor\mediatek\proprietary\hardware\sensor
// Acceleration.cpp // 【具体的 sensor 实现函数】:vendor\mediatek\proprietary\hardware\sensor
// Gyroscope.cpp
// Magnetic.cpp
// StepCounter.cpp
// 。。。
// ------- kernel ----------------------
// Accel.c // kernel-3.18\drivers\misc\mediatek\accelerometer
// alsps.c // kernel-3.18\drivers\misc\mediatek\alsps
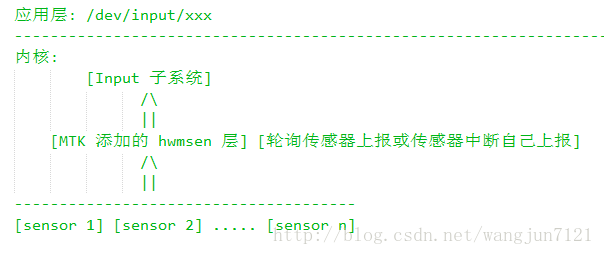
驱动框架图
MTK sensor 上报数据经过了一个中间层,框图为
MTK 通用模块实现

初始化

获得数据

应用层接口
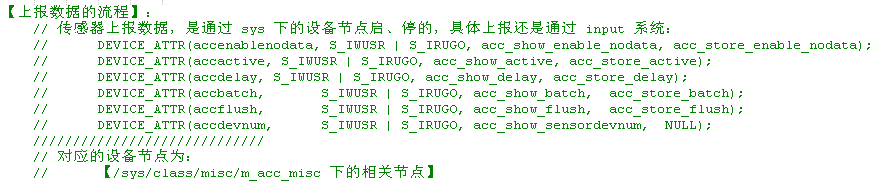

通过 sys 节点启动传感器
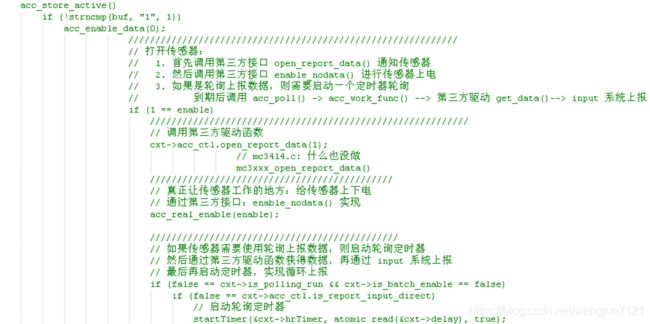
定时器->工作队列->get_data()->input

MTK 通用模块提供接口
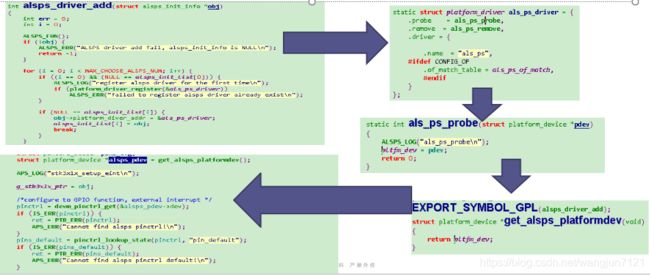
xxx_driver_add(): xxx_init_info 包含了 sensor 的相关信息,通过将这个结构体注册到 common driver 实现 sendor auto detect 的功能
xxx_register_data_path(): 用于注册获取数据相关操作函数
xxx_register_control_path():用于注册控制相关操作函数
第三方驱动实现
xxx_data_path: 包含 get_data() 获取数据函数
xxx_control_path: 包含相关开头 sensor 操作函数
xxx_init_info: sensor 相关信息
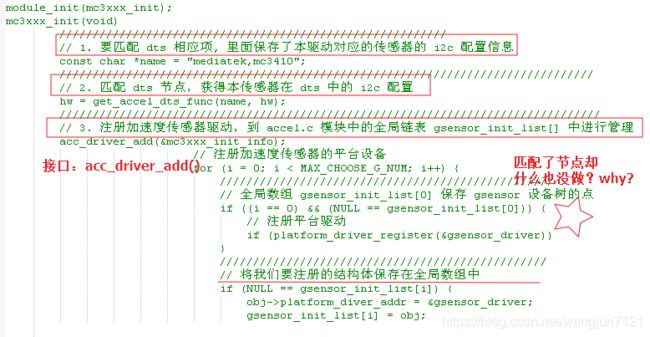
初始化
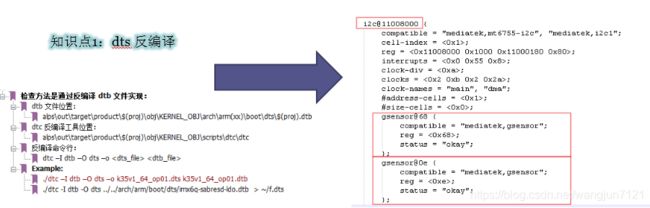
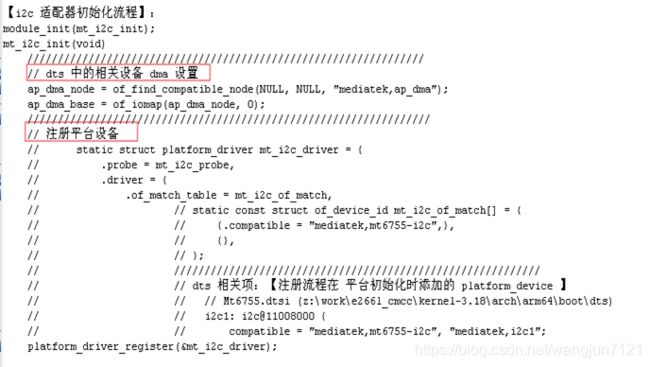
I2C 匹配

备注:
问题 1
acc_driver_add() 煞费苦心的注册了一个 platform_device 匹配 gsensor,却在 probe() 中假装做了些事情。

应该是预留的接口,用于做一些 sensor 全局的设置,比如获得 pinctrl 设备,设置特殊工作引脚什么的。。。
问题 2
G-sensor 的 probe() 为什么会进两次?

Ps 距离上报 10cm 流程
########################################
# Ps 距离传感器上报值处理:sensor box 显示为 10cm
########################################
// 内核上报:
#getevent /dev/input/event4
// 接近上报:0x01
0002 0002 00000001
0002 0001 00000003
0000 0000 00000000
// 远离上报:0x02
0002 0002 00000002
0002 0001 00000003
0000 0000 00000000
# HAL 处理,然后就会通过套接字上报给上层应用 APK
// Proximity.cpp (vendor\mediatek\proprietary\hardware\sensor)
ProximitySensor::processEvent(int code, int value)
switch (code) {
case EVENT_TYPE_PS_VALUE:
mPendingEvent.distance = (value - 1) * PROXIMITY_RANGE; // Hwmsen_chip_info.h (vendor\mediatek\proprietary\hardware\sensor)
// #define PROXIMITY_RANGE 10.00f
break;
}