高通平台LCD驱动参数说明
下面是高通平台LCD驱动参数的说明,此说明是根据经验值以及高通的寄存器说明得出的,并非高通官方说明,如有疑问,欢迎探讨。针对一些没有用过的参数,由于没有实践证明,故不做妄加的评论。
mipi_xxx_xxx_xxx_pt.c
static struct mipi_dsi_phy_ctrldsi_video_mode_phy_db = {
/*DSI Bit Clock at 513 MHz, 4 lane, RGB888 */
/*regulator */
{0x05,0x01, 0x01, 0x00},
/*timing */
{0x8f,0x34, 0x14, 0x00, 0x46, 0x4b, 0x1a, 0x37,
0x19,0x03, 0x04},
/*phy ctrl */
{0x7f,0x00, 0x00, 0xef},
/*strength */
{0xbb,0x02, 0x06, 0x00},
/*pll control */
{0x00,0xfc, 0x30, 0xd2, 0x00, 0x40, 0x37, 0x62,
0x00,0x07, 0x01,
0x05,0x14, 0x03, 0x0, 0x0, 0x0, 0x20, 0x0, 0x02, 0x0},
};
这一段是配置D-PHY的寄存器,主要是MIPI的时序方面的,按照dsi_timing_program_msm7x2xA.xlsm EXCEL表来配置即可,具体值的作用可以参考8X25Q的寄存器说明文件:
80_VM180_2_MSM8X25Q_MOBILE_STATION_MODEM_SOFTWARE_INTERFACE.pdf
其中寄存器对应关系为:
Regulator ---------> 0x02CC ~ 0x02DC
Timing ------------> 0x0260 ~ 0x028C
Phy_ctrl -----------> 0x0200 ~ 0x024C
Strength -----------> 0x02A0 ~ 0x02A8
Pll_control --------> 0x0200 ~ 0x024C
在mipi_video_xxx_xxx_pt_init函数中主要是对屏的显示区域和mipi控制器进行配置。
pinfo.xres 有效数据的宽度
pinfo.yres 有效数据的高度
pinfo.type panel的类型
pinfo.bpp 颜色深度
pinfo.lcdc.h_back_porch 水平同步后肩
pinfo.lcdc.h_front_porch 水平同步前肩
pinfo.lcdc.h_pulse_width 水平同步脉冲宽度
pinfo.lcdc.v_back_porch 垂直同步后肩
pinfo.lcdc.v_front_porch 垂直同步前肩
pinfo.lcdc.v_pulse_width 垂直同步脉冲宽度

pinfo.clk_rate mipi每根lane线的波特率
pinfo.bl_max 背光最大亮度,与设置菜单中最大背光亮度相对应
pinfo.bl_min 背光最小亮度,与设置菜单中最小背光亮度相对应
pinfo.mipi.mode mipi屏的类型
pinfo.mipi.pulse_mode_hsa_he 表示是否在发送 VS/VE之后发送HSA,0表示不发送,1表示发送
pinfo.mipi.hfp_power_stop
pinfo.mipi.hbp_power_stop
pinfo.mipi.hsa_power_stop
上面三个参数表示 hfp、hbp、hsa 是用mipi 的高速模式还是低速模式来传输,0表示高速,1表示低速
pinfo.mipi.traffic_mode mipi传输模式,分为 non-burst with sync pulse 模式;non-burst with sync events 模式和 burst模式,它们的区别如下:
1. non-burst with sync pulse
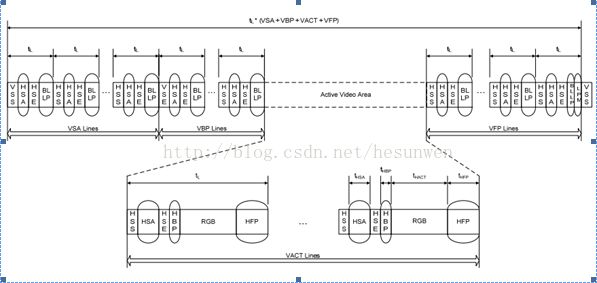
2. non-burstwith sync events
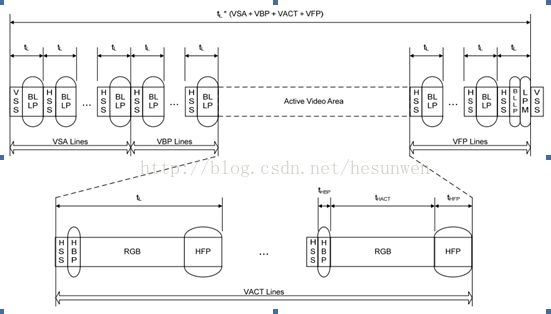
3. Burst
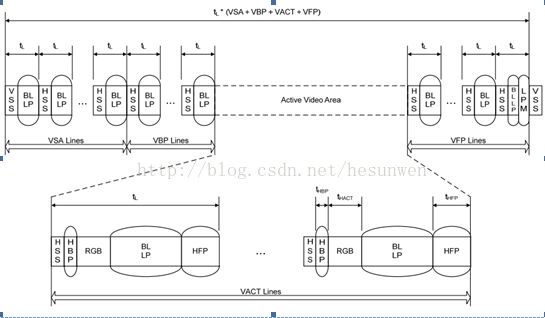
这几种模式只是在传输数据波形上有所区别,具体看屏规格书要求来选择传输模式,一般使用burst模式
pinfo.mipi.dst_format 表示颜色的格式,RGB565 , RGB666 , RGB888
pinfo.mipi.rgb_swap 颜色格式的切换
pinfo.mipi.data_laneX mipi lane线开关
pinfo.mipi.force_clk_lane_hs 将mipi的clock lane 设置为高速,具体看屏的规格有没有这种需求
mipi_xxx.c
{DTYPE_DCS_WRITE, 1, 0, 0, 120, sizeof(exit_sleep),exit_sleep},
第一个参数:表示数据包的类型,如下图:
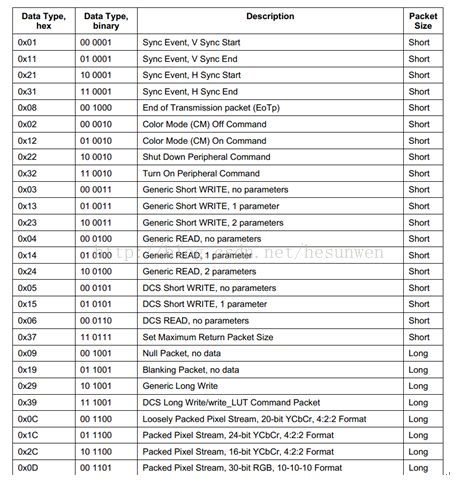
一般的,我们发送0x11、0x29、0x10、0x28时使用 DTYPE_DCS_WRITE ,发送初始化数据时使用 DTYPE_DCS_LWRITE 。但某些屏可能会其它类型,具体需要看屏的规格书。
第二个参数:使用默认值即可。
第三个参数:用于多个MIPI外围设备,使用默认值即可。
第四个参数:应答信号,当设置为“1”时,发送命令成功后屏的IC会返回一个应答信号,如果不成功,则停止通信。通过设置这个位可以验证BB和屏是否通信成功。
第五个参数:发送完后的延时,毫秒级。
第六个参数:发送的数据大小。
第七个参数:需要发送的数据。
mfd->cont_splash_done
用于开机时在kernel中不初始化屏,如果需要在kernel中初始化屏的话,则需要将board-msm7627a-display中的 mdp_pdata 结构体的 .cont_splash_enabled = 0x1 修改为 0x0。
以上是KERNEL中的LCD驱动参数,LK中的参数与此类似
printk("%s: ", __func__);
for (i = 0; i < tp->len; i++)
printk("0x%02x; ", *bp++);
printk("\n");