Linux下串口编程
刚开始接触串口编程,我满脑子疑问,串口是什么?串口编程的目的是什么?编程要写什么程序?看到什么现象意味着串口编程基本完成?在百度大婶的帮助下我看到了很多的前辈写的关于Linux的的的的下串口编程的文章,给了我很多启发,也驱使我写下这篇博客,如何从一脸蒙逼到原来如此。
一,串口是什么
物理层:常用的串口接头有两种,一种是9针串口(简称DB-9),一种是25针串口(简称DB-25)每种接头都有公头和母头之分,其中带针状的接头是公头,而带孔状的接头是母头。
软件层:对于PC,其名称为COM3,COM4等等,而在Linux下串口常为设备文件名,常为ttyS0,ttyS1形式等等,
以DB9为例,如图:


二,串口通信基础知识
1,串口通信协议
串口通信(Serial Communication),是指外设和计算机间,通过数据信号线,地线等,按位进行传输数据的一种通讯方式。
简单来说,串口线用来连接两台设备(通常是个人计算机和开发板),这样两台设备就可以实现通信,但必须要遵循某种协议。
在串口通信中,常用的协议包括RS-232,RS-422和RS-485。
•RS-232:标准串口,最常用的一种串行通讯接口有(A,B和C),它们分别采用不同的电压来提示RS-232C,逻辑1的电平为-3~-15V,逻辑0的电平为+3~+15V,注意电平的定义反相了一次。传送距离最大约为15米,最高速率为20KB /秒所以RS- 232适合本地设备之间的通信
.RS-422:最大传输距离为1219米,最大传输速率为10MB / s.RS-232是为点对点通讯而设计的,其驱动器负载为3~7kΩ.S。 其平衡双绞线的度与传输速度成反比,在100KB /秒的速率以下,才可能达到最大传输距离。很短的距离下才能。一般100米的双绞线上所能获得的仅为1Mb / s的
•RS-485:从RS-422基础上发展而来的,最大传输距离约为1219米,最大传输速率为10Mb / s。平衡双绞线的长度与传输速率成反比,在100KB / s的速率以下,才可能使用规定最长的电缆长度。只有在很短的距离下才才。绞线最大传输速率仅为1Mb / s的。
2,串行通信方式
串行通讯根据信息的传送方向柯林斯分为单工,状语从句:全双工半双工三种
单工:如果在通信过程的任意时刻,信息只能由一方甲传到另一方B,则称为单工。
半双工:如果在任意时刻,信息既可由甲传到B,又能由乙传A,但只能由一个方向上的传输存在,称为半双工传输。
全双工:如果在任意时刻,线路上存在一个到乙和乙,则称为全双工。
电话线就是二线全双工信道。由于采用了回波抵消技术,双向的传输信号不致混混不清。双工信道有时也将收,发信道分开,采用分离的线路或频带传输相反方向的信号,如回线传输。

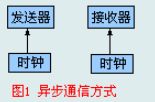
通信串行根据是否有时钟线进行同步PcHub中国汉语中类似的分为同步通信,通信异步通信同步
的英文一种比特同步通信技术,要求发收双方具有同频同相的同步时钟信号,只需在传送报文的最前面附加特定的同步字符,使发收双方建立同步,此后便在同步时钟的控制下逐位发送/接收。
异步通信在发送字符时,所发送的字符之间的时隙可以任意的英文的。但是接收端必须时刻做好接收的准备(如果接收端主机的电源都没有加上,那么发送端发送字符就没有意义,因为接收端根本无法接收)。发送端可以在任意时刻开始发送字符,因此必须在每一个字符的开始和结束的地方加上标志,即加上开始位和停止位,以便使接收端能够正确地将每一个字符接收下来。
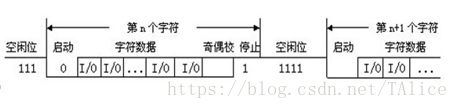
3,异步通信的数据格式
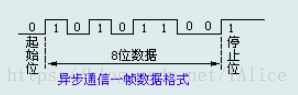
(1)起始位:先发出一个逻辑“0”信号,表示传输字符的开始。
(2)资料位:紧接着起始位之后。资料位的个数可以是4,5,6,7, 8等,构成一个字符。通常采用ASCII码。从最低位开始传送,靠时钟定位。
(3)奇偶校验位:资料位加上这一位后,使得“1”的位数应为偶数偶校验)或奇数(奇校验),以此来校验资料传送的正确性。
(4)停止位:它是一个字符数据的结束标志。可以是1位,1.5位,2位的高电平。
(5)空闲位:处于逻辑“1”状态,表示当前线路上没有资料传送。
(6)波特率:是衡量资料传送速率的指针。资料传送速率为120字符/秒,而每一个字符为10位,则其传送的波特率为10×120 = 1200字符/秒= 1200波特。
三,串口编程
上面介绍了串口数据传输的机制,但如何编程实现呢?
1,串口编程需要包含的头文件:
//串口相关的头文件
#include /*标准输入输出定义*/
#include /*标准函数库定义*/
#include /*Unix 标准函数定义*/
#include
#include
#include /*文件控制定义*/
#include /*PPSIX 终端控制定义*/
#include /*错误号定义*/
#include
//宏定义
#define FALSE -1
#define TRUE 0
extern int UART0_Open(int argc,char**argv);
extern void UART0_Close(int fd) ;
extern int UART0_Set(int fd,int speed,int flow_ctrl,int databits,int stopbits,int parity);
extern int UART0_Init(int fd, int speed,int flow_ctrl,int databits,int stopbits,int parity) ;
extern int UART0_Recv(int fd, char *rcv_buf,int data_len);
extern int UART0_Send(int fd, char *send_buf,int data_len);
2,串口配置的代码:
#include"usart.h"
/*******************************************************************
*名称: UART0_Open
*功能: 打开串口并返回串口设备文件描述
*入口参数: fd 文件描述符
port 串口号(ttyS0,ttyS1,ttyS2)
*出口参数:正确返回为1,错误返回为0
*******************************************************************/
int UART0_Open(int fd,char*port)
{
fd = open( port, O_RDWR|O_NOCTTY|O_NDELAY);
if (fd<0)
{
perror("Can't Open Serial Port");
return(FALSE);
}
//恢复串口为阻塞状态
if(fcntl(fd, F_SETFL, 0) < 0)
{
printf("fcntl failed!\n");
return(FALSE);
}
else
{
printf("fcntl=%d\n",fcntl(fd, F_SETFL,0));
}
//测试是否为终端设备
if(0 == isatty(STDIN_FILENO))
{
printf("standard input is not a terminal device\n");
return(FALSE);
}
else
{
printf("isatty success!\n");
}
printf("fd->open=%d\n",fd);
return fd;
}
/*******************************************************************
*名称: UART0_Close
*功能: 关闭串口并返回串口设备文件描述
*入口参数: fd 文件描述符
port 串口号(ttyS0,ttyS1,ttyS2)
*出口参数:void
*******************************************************************/
void UART0_Close(int fd)
{
close(fd);
}
/*******************************************************************
*名称: UART0_Set
*功能: 设置串口数据位,停止位和效验位
*入口参数: fd 串口文件描述符
* speed 串口速度
* flow_ctrl 数据流控制
* databits 数据位 取值为 7 或者8
* stopbits 停止位 取值为 1 或者2
* parity 效验类型 取值为N,E,O,,S
*出口参数:正确返回为1,错误返回为0
*******************************************************************/
int UART0_Set(int fd,int speed,int flow_ctrl,int databits,int stopbits,int parity)
{
int i;
int status;
int speed_arr[] = { B115200, B19200, B9600, B4800, B2400, B1200, B300};
int name_arr[] = {115200, 19200, 9600, 4800, 2400, 1200, 300};
struct termios options;
/*tcgetattr(fd,&options)得到与fd指向对象的相关参数,并将它们保存于options,该函数还可以测试配置是否正确,该串口是否可用等。若调用成功,函数返回值为0,若调用失败,函数返回值为1.
*/
if( tcgetattr( fd,&options) != 0)
{
perror("SetupSerial 1");
return(FALSE);
}
//设置串口输入波特率和输出波特率
for ( i= 0; i < sizeof(speed_arr) / sizeof(int); i++)
{
if (speed == name_arr[i])
{
cfsetispeed(&options, speed_arr[i]);
cfsetospeed(&options, speed_arr[i]);
}
}
//修改控制模式,保证程序不会占用串口
options.c_cflag |= CLOCAL;
//修改控制模式,使得能够从串口中读取输入数据
options.c_cflag |= CREAD;
//设置数据流控制
switch(flow_ctrl)
{
case 0 ://不使用流控制
options.c_cflag &= ~CRTSCTS;
break;
case 1 ://使用硬件流控制
options.c_cflag |= CRTSCTS;
break;
case 2 ://使用软件流控制
options.c_cflag |= IXON | IXOFF | IXANY;
break;
}
//设置数据位
//屏蔽其他标志位
options.c_cflag &= ~CSIZE;
switch (databits)
{
case 5 :
options.c_cflag |= CS5;
break;
case 6 :
options.c_cflag |= CS6;
break;
case 7 :
options.c_cflag |= CS7;
break;
case 8:
options.c_cflag |= CS8;
break;
default:
fprintf(stderr,"Unsupported data size\n");
return (FALSE);
}
//设置校验位
switch (parity)
{
case 'n':
case 'N': //无奇偶校验位。
options.c_cflag &= ~PARENB;
options.c_iflag &= ~INPCK;
break;
case 'o':
case 'O'://设置为奇校验
options.c_cflag |= (PARODD | PARENB);
options.c_iflag |= INPCK;
break;
case 'e':
case 'E'://设置为偶校验
options.c_cflag |= PARENB;
options.c_cflag &= ~PARODD;
options.c_iflag |= INPCK;
break;
case 's':
case 'S': //设置为空格
options.c_cflag &= ~PARENB;
options.c_cflag &= ~CSTOPB;
break;
default:
fprintf(stderr,"Unsupported parity\n");
return (FALSE);
}
// 设置停止位
switch (stopbits)
{
case 1:
options.c_cflag &= ~CSTOPB; break;
case 2:
options.c_cflag |= CSTOPB; break;
default:
fprintf(stderr,"Unsupported stop bits\n");
return (FALSE);
}
//修改输出模式,原始数据输出
options.c_oflag &= ~OPOST;
options.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG);
//options.c_lflag &= ~(ISIG | ICANON);
//设置等待时间和最小接收字符
options.c_cc[VTIME] = 1; /* 读取一个字符等待1*(1/10)s */
options.c_cc[VMIN] = 1; /* 读取字符的最少个数为1 */
//如果发生数据溢出,接收数据,但是不再读取 刷新收到的数据但是不读
tcflush(fd,TCIFLUSH);
//激活配置 (将修改后的termios数据设置到串口中)
if (tcsetattr(fd,TCSANOW,&options) != 0)
{
perror("com set error!\n");
return (FALSE);
}
return (TRUE);
}
/*******************************************************************
*名称: UART0_Init()
*功能: 串口初始化
*入口参数: fd 文件描述符
* speed 串口速度
* flow_ctrl 数据流控制
* databits 数据位 取值为 7 或者8
* stopbits 停止位 取值为 1 或者2
* parity 效验类型 取值为N,E,O,,S
*
*出口参数:正确返回为1,错误返回为0
*******************************************************************/
int UART0_Init(int fd, int speed,int flow_ctrl,int databits,int stopbits,int parity)
{
int err;
//设置串口数据帧格式
if (UART0_Set(fd,115200,0,8,1,'N') == FALSE)
{
return FALSE;
}
else
{
return TRUE;
}
}
/*******************************************************************
* 名称: UART0_Recv
* 功能: 接收串口数据
* 入口参数: fd 文件描述符
* rcv_buf 接收串口中数据存入rcv_buf缓冲区中
* data_len 一帧数据的长度
* 出口参数: 正确返回为1,错误返回为0
*******************************************************************/
int UART0_Recv(int fd, char *rcv_buf,int data_len)
{
int len,fs_sel;
fd_set fs_read;
struct timeval time;
FD_ZERO(&fs_read);
FD_SET(fd,&fs_read);
time.tv_sec = 10;
time.tv_usec = 0;
//使用select实现串口的多路通信
fs_sel = select(fd+1,&fs_read,NULL,NULL,&time);
printf("fs_sel = %d\n",fs_sel);
if(fs_sel)
{
len = read(fd,rcv_buf,data_len);
printf("I am right!(version1.2) len = %d fs_sel = %d\n",len,fs_sel);
return len;
}
else
{
printf("Sorry,I am wrong!");
return FALSE;
}
}
/********************************************************************
* 名称: UART0_Send
* 功能: 发送数据
* 入口参数: fd 文件描述符
* send_buf 存放串口发送数据
* data_len 一帧数据的个数
* 出口参数: 正确返回为1,错误返回为0
*******************************************************************/
int UART0_Send(int fd, char *send_buf,int data_len)
{
int len = 0;
len = write(fd,send_buf,data_len);
if (len == data_len )
{
printf("send data is %s\n",send_buf);
return len;
}
else
{
tcflush(fd,TCOFLUSH);
return FALSE;
}
}
3,实现串口传输的主程序代码:
#include "usart.h"
#include /*标准输入输出定义*/
#include /*标准函数库定义*/
#include /*Unix 标准函数定义*/
#include
#include
#include /*文件控制定义*/
#include /*PPSIX 终端控制定义*/
#include /*错误号定义*/
#include
int main(int argc, char **argv)
{ int fd = -1; //文件描述符,先定义一个与程序无关的值,防止fd为任意值导致程序出bug
int err; //返回调用函数的状态
int len;
int i;
char rcv_buf[100];
//char send_buf[20]="tiger john";
char send_buf[40];
//printf("argc=%d\n",fd);
if(argc != 3)
{
printf("Usage: %s /dev/ttySn 1(send data)/1 (receive data) \n",argv[0]);
printf("open failure : %s\n", strerror(errno));
return FALSE;
}
fd = UART0_Open(fd,argv[1]); //打开串口,返回文件描述符
// fd=open("dev/ttyS1", O_RDWR);
//printf("fd= \n",fd);
do
{
err = UART0_Init(fd,115200,0,8,1,'N');
printf("Set Port Exactly!\n");
}while(FALSE == err || FALSE == fd);
if(0 == strcmp(argv[2],"0")) //开发板向pc发送数据的模式
{
fgets(send_buf,40,stdin); //输入内容,最大不超过40字节,fgets能吸收回车符,这样pc收到的数据就能自动换行
for(i = 0;i < 10;i++)
{
len = UART0_Send(fd,send_buf,40);
if(len > 0)
printf(" %d time send %d data successful\n",i,len);
else
printf("send data failed!\n");
sleep(2);
}
UART0_Close(fd);
}
else //开发板收到pc发送的数据的模式
{
while (1) //循环读取数据
{
len = UART0_Recv(fd, rcv_buf,sizeof(rcv_buf));
if(len > 0)
{
rcv_buf[len] = '\0';
printf("receive data is %s\n",rcv_buf);
printf("len = %d\n",len);
}
else
{
printf("cannot receive data\n");
}
sleep(2);
}
UART0_Close(fd);
}
}
三,程序验证
将写好的程序经交叉编译后放到开发板上运行,英文的开发下面板电脑间与串口通信的例子
左边:PC下的串口调试助手XCOM界面
右边:SecureCRT的的的显示的是开发板界面
开发板向PC发送hello word success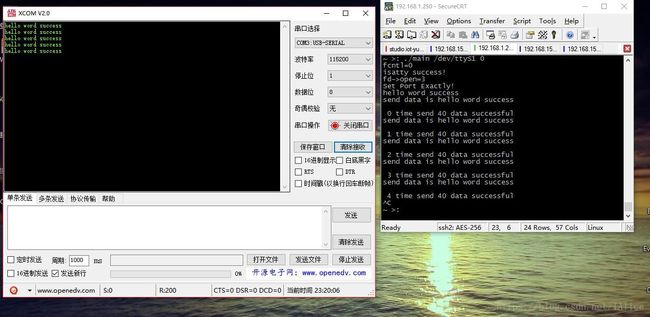
PC向开发板发送hello word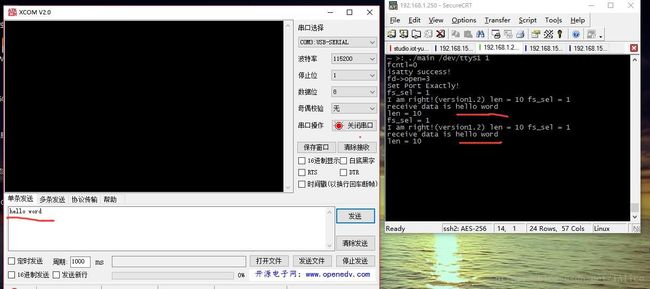
参考博客:HTTPS://blog.csdn.net/baweiyaoji/article/details/72885633