CloudCompare插件编写二(数据结构)
唠叨
本文分三篇来介绍一个完整的CloudComapre插件的编写教程,分别是插件框架篇、数据结构篇、算法实现篇。
这是第二篇,数据结构篇,你可以根据本文改成自己的插件,待卿临幸。
特别注意:本文的CloudCompare源码构建的是Qt工程并使用Qt Creator开发,并不是Visual Studio。
qSAF源码:Github . qSAF
前文概要
在上回中,我们已经实现了插件的框架,现在要在doAction()中写插件的具体实现。
插件需求
我们要做的是一个qSAF(Scan Angle Filter)插件,它可以过滤给定范围内点的扫描角度。
也就是用户输入两个角度值,如20度、70度,
过滤输出每个点的扫描角度在大于等于20度、小于等于70度的范围的点云。
需求分析
要实现这个功能,我们需要有一个界面,可以让用户输入两个角度,然后获取两个角度值,接着遍历每个点,获取每个点的扫描角度,然后获得角度在大于等于20度、小于等于70度范围的点云,显示输出。
简单地说,就是要:
- 输入界面
- 遍历角度
- 输出点云
1. 输入界面是QT基础;3. 输出点云是CC套路;只有2. 遍历角度有点纠结。
因此本文第二篇主要介绍2. 遍历角度,即介绍点云中点的数据结构。
注意:不同类型文件的数据结构不同,本文以激光雷达文件(.las)来做介绍。
las文件的读入
首先,我们从宇宙的起源开始说起……
额,还是从.las文件的读入开始说起吧~
.las文件的读入首先进过FileIOFilter这个类,判断是雷达文件(.las)后,进入LASFilter类,并从它的loadFile()函数读入。
先看下loadFile()函数声明:
virtual CC_FILE_ERROR loadFile(QString filename, ccHObject& container, LoadParameters& parameters) override;
特别注意三个传入参数!我就是忽视了这里才找了好久。。。
QString filename是点云文件名(包括路径)ccHObject& container是一个实体(ccHObject),可以添加点云(ccPointCloud)LoadParameters& parameters是选择读入文件后提示要勾选雷达的哪些信息
然后看下loadFile()函数体
.las文件首先从io流读入,再使用liblas这个外部库存储:
liblas::Reader reader(liblas::ReaderFactory().CreateWithStream(ifs));
这里说下liblas:
liblas是用于读取和编写非常常见的LAS LiDAR格式的C/C++库,我们使用它来做对LAS的直接读取。
官网如下:
https://www.liblas.org/
然后把liblas读入的文件进行各种处理和封装,最终封装成ccPointCloud
ccPointCloud* loadedCloud = 0;
int sfIndex = loadedCloud->addScalarField(field->sf);
...
loadedCloud->setName(chunkName);
...
loadedCloud->setMetaData(LAS_SCALE_X_META_DATA, QVariant(lasScale.x));
...
loadedCloud->addPoint(P);
...
然后通过:
container.addChild(loadedCloud);
添加到ccHObject中
所以:点云的信息,都是存储在ccPointCloud中的!
而扫描角度存储在ccPointCloud的标量域中(ccScalarField)
ccPointCloud
前面已经说了很多ccPointCloud了,它就是CloudCompare中存储点云的类。
我们看看它的说明
//! A 3D cloud and its associated features (color, normals, scalar fields, etc.)
/** A point cloud can have multiple features:
- colors (RGB)
- normals (compressed)
- scalar fields
- an octree strucutre
- per-point visibility information (to hide/display subsets of points)
- other children objects (meshes, calibrated pictures, etc.)
**/
我要的扫描角度就在scalar fields
然而在ccPointCloud没有直接的方法获得众多标量域中的扫描角度
终于在它的父类ChunkedPointCloud中发现了
ChunkedPointCloud
ccPointCloud的父类ChunkedPointCloud中有如下两个函数:
# 通过标量域名字获得其在标量域数组中的索引
int ChunkedPointCloud::getScalarFieldIndexByName(const char* name) const
# 通过索引获得特定标量域的指针
ScalarField* ChunkedPointCloud::getScalarField(int index) const
通过这两个函数就可以获得指向扫描角度的指针了,要想访问扫描角度中每个点的值,需要使用ScalarField父类GenericChunkedArray的方法
GenericChunkedArray
# 通过每个点的索引访问特定标量域的每个的的值
inline const ElementType* getValue(unsigned index) const
LASOpenDlg
标量域中扫描角度的名字可以在LASOpenDlg.h中找到
"Scan Angle Rank"
整理下思路
- 用
Scan Angle Rank,通过getScalarFieldIndexByName()获得扫描角度在标量域中的索引 - 用索引,通过
getScalarField()获得扫描角度标量域指针 - 用指针,通过
getValue()获得每个点的值
这样就获取到了每个点的扫描角度值,然后:
- 比较扫描角度值与用户输入区间的大小,把合适的值存储起来
- 把合适值封装成点云实体
- 显示在界面上
上面整理的思路在下篇实现,现在我们已经知道怎么获取点云中扫描角度的值了,那其他信息呢?
点云其他信息的获取
看下在QT的调试信息:
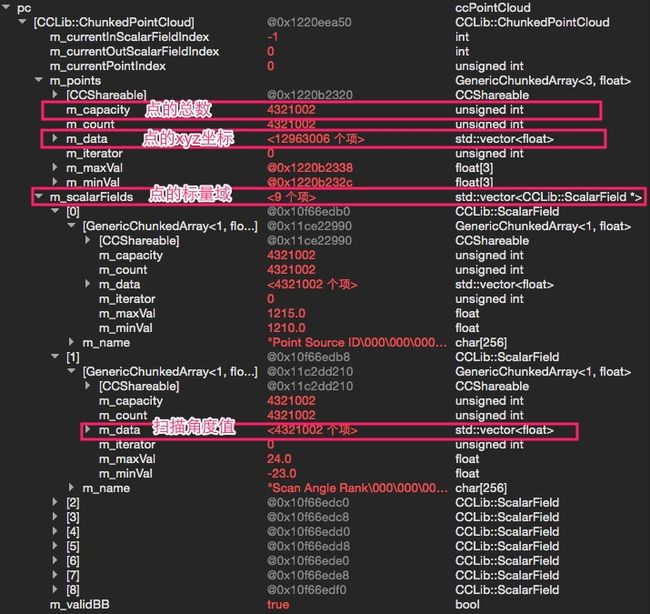
我们可以发现,其实点云的信息都能在ccPointCloud中获取,比如点容量、点数量、点坐标、标量域、颜色值等。
其中,标量域vector中有9项信息,存储的标量域顺序为:
- [0] Point Source ID
- [1] Scan Angle Rank
- [2] Flightline Edge
- [3] Scan Direction
- [4] Number of Returns
- [5] Return Number
- [6] Time
- [7] Intensity
- [8] Classification
至于如何获取每种数据,都有相应的方法实现,不是在ccPointCloud,就是在它的父类中,耐心点总能找到的~
下篇概要
下篇是算法实现篇,主要说了qSAF插件的具体实现,包括上面说的:
- 输入界面
- 遍历角度
- 输出点云
请戳这里:
CloudComapre插件编写三(算法实现)