CloudCompare插件编写三(算法实现)
唠叨
本文分三篇来介绍一个完整的CloudComapre插件的编写教程,分别是插件框架篇、数据结构篇、算法实现篇。
这是第三篇,算法实现篇,你可以根据本文改成自己的插件,待卿临幸。
特别注意:本文的CloudCompare源码构建的是Qt工程并使用Qt Creator开发,并不是Visual Studio。
qSAF源码:Github . qSAF
前文概要
在上回中,我们知道了点云中扫描角度的存储结构,下面我们来讲qSAF的具体实现。
UI界面
新建QT设计器界面类,命名为ccSAFDlg,在ccSAFDlg.ui文件设计简单的界面。
因为我们只需要一个范围,一个确认取消键,所以我把它弄成这样子:
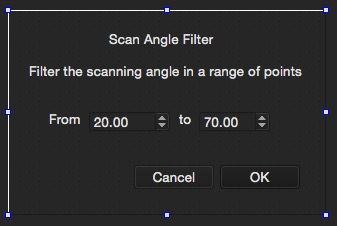
doubleSpinBox要设置范围:0.00到90.00,默认值分别设为20.00和70.00。
ccSAFDlg.h:
#ifndef CCSAFDLG_H
#define CCSAFDLG_H
#include "ui_SAFDlg.h"
#include
namespace Ui {
class ccSAFDlg;
}
class ccSAFDlg : public QDialog, public Ui::ccSAFDlg
{
Q_OBJECT
public:
explicit ccSAFDlg(QWidget *parent = 0);
protected slots:
//! Saves (temporarily) the dialog paramters on acceptation
void saveSettings();
};
#endif // CCSAFDLG_H
ccSAFDlg.cpp:
#include "ccSAFDlg.h"
//定义两个静态阈值,并初始化
static double threshold_1 = 20;
static double threshold_2 = 70;
ccSAFDlg::ccSAFDlg(QWidget *parent) : QDialog(parent), Ui::ccSAFDlg()
{
setupUi(this);
//关联信号槽
connect(buttonBox, SIGNAL(accepted()), this, SLOT(saveSettings()));
//初始化设置阈值
doubleSpinBox_1->setValue(threshold_1);
doubleSpinBox_2->setValue(threshold_2);
}
void ccSAFDlg::saveSettings()
{
//OK后重新赋值
threshold_1 = doubleSpinBox_1->value();
threshold_2 = doubleSpinBox_2->value();
}
现在界面就做好了。
插件doAction实现
至于doAction的实现,点云其中的数据结构,可以参考第二篇,数据结构篇
简单地说,我们需要:
- 用
Scan Angle Rank,通过getScalarFieldIndexByName()获得扫描角度在标量域中的索引 - 用索引,通过
getScalarField()获得扫描角度标量域指针 - 用指针,通过
getValue()获得每个点的值 - 比较扫描角度值与用户输入区间的大小,把合适的值存储起来
- 把合适值封装成点云实体
- 显示在界面上
大体的算法思路上是没有问题的,但是有个纠结的地方,就是是否使用进度条。
实测SAF处理一个雷达文件,
- 使用进度条耗时:129.1s
- 不用进度条耗时:3.5s
这种压倒性的差距让我果断砍掉真·进度条,没错!我使用假·进度条,就是不会动的进度条。
这样短时间的处理使用假·进度条,既不会降低处理速度,也不会降低用户体验~
下面就是完整代码,注释中有真·进度条的实现([进度条]),但不推荐使用
void qSAF::doAction()
{
//当插件加载时,m_app应该已经被CC初始化了
assert(m_app);
if (!m_app)
return;
//获取选择的实体
const ccHObject::Container& selectedEntities = m_app->getSelectedEntities();
//获取选择的实体数量
size_t selNum = selectedEntities.size();
//确保只选择一个实体
if (selNum != 1)
{
m_app->dispToConsole("[SAF] Select only one cloud!", ccMainAppInterface::ERR_CONSOLE_MESSAGE);
return;
}
ccHObject* ent = selectedEntities[0];
assert(ent);
//确保选择的实体是POINT_CLOUD类型
if (!ent || !ent->isA(CC_TYPES::POINT_CLOUD))
{
m_app->dispToConsole("[SAF] Select a real point cloud!", ccMainAppInterface::ERR_CONSOLE_MESSAGE);
return;
}
//从选择的实体中转换成ccPointCloud*类型
ccPointCloud* pc = static_cast(ent);
//获取点云的数量m_count
unsigned count = pc->size();
//初始化阈值变量
static double threshold_1 = 20;
static double threshold_2 = 70;
double threshold_temp = 0;
//显示插件ui窗体
{
ccSAFDlg safDlg(m_app->getMainWindow());
safDlg.doubleSpinBox_1->setValue(threshold_1);
safDlg.doubleSpinBox_2->setValue(threshold_2);
if(!safDlg.exec())
{
return;
}
//存储阈值
threshold_1 = safDlg.doubleSpinBox_1->value();
threshold_2 = safDlg.doubleSpinBox_2->value();
}
//显示进度条窗体
QProgressDialog pDlg;
pDlg.setWindowTitle("SAF");
pDlg.setLabelText(QString("Scan Angle Filter\nfrom %1 to %2").arg(threshold_1).arg(threshold_2));
//[进度条]设置进度条总范围
//pDlg.setRange(0, count);
pDlg.setCancelButton(0);
pDlg.show();
QApplication::processEvents();
QElapsedTimer timer;
//计时开始
timer.start();
ScalarType scanAngle;
CCLib::ReferenceCloud rangeAnglerc(pc);
//确保 threshold_1 小于 threshold_2
if(threshold_1 > threshold_2)
{
threshold_temp = threshold_1;
threshold_1 = threshold_2;
threshold_2 = threshold_temp;
}
//[进度条]进度条的取消SAF按钮
//bool wasCancelled = false;
//获取 Scan Angle Rank 的索引
int scanAngleSFIndex = pc->getScalarFieldIndexByName("Scan Angle Rank");
//[重点]遍历每个点的操作
for(unsigned i = 0; i < count; ++i)
{
//获取每个点的扫描角度
scanAngle = pc->getScalarField(scanAngleSFIndex)->getValue(i);
//取扫描角度的绝对值
if(scanAngle < 0)
{
scanAngle = -scanAngle;
}
//如果扫描角度在给定的阈值范围,则添加它的索引到参考云
if(threshold_1 <= scanAngle && scanAngle <= threshold_2)
{
rangeAnglerc.addPointIndex(i);
}
// //[进度条]重置进度条
// pDlg.setValue(i);
// QCoreApplication::processEvents();
// //[进度条]取消SAF处理
// if (pDlg.wasCanceled())
// {
// wasCancelled = true;
// break;
// }
}
//把 ReferenceCloud 类型克隆成 ccPointCloud 类型
ccPointCloud* rangeAnglepc = pc->partialClone(&rangeAnglerc);
//判断rangeAnglepc是否为空,即所选范围内是否有点
if(!rangeAnglepc)
{
m_app->dispToConsole("[SAF] Failed to extract the range angle subset.", ccMainAppInterface::ERR_CONSOLE_MESSAGE);
return;
}
//计算SAF后点数所占的百分比和SAF过程所花的时间
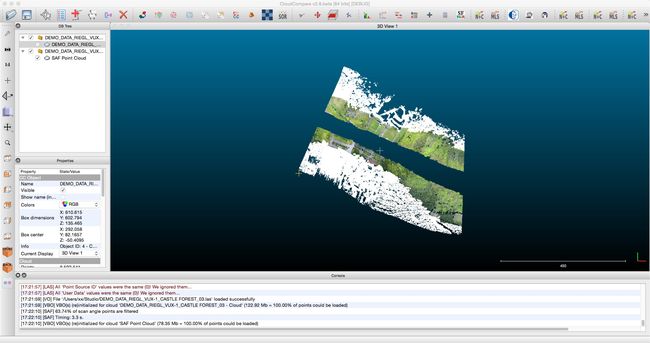
m_app->dispToConsole(QString("[SAF] %1% of scan angle points are filtered").arg((rangeAnglerc.size() * 100.0) / count, 0, 'f', 2), ccMainAppInterface::STD_CONSOLE_MESSAGE);
m_app->dispToConsole(QString("[SAF] Timing: %1 s.").arg(timer.elapsed() / 1000.0, 0, 'f', 1), ccMainAppInterface::STD_CONSOLE_MESSAGE);
//关闭进度条
pDlg.close();
QApplication::processEvents();
// //[进度条]取消SAF
// if (wasCancelled)
// {
// m_app->dispToConsole("[SAF] SAF was cancelled", ccMainAppInterface::STD_CONSOLE_MESSAGE);
// return;
// }
//隐藏原始点云
pc->setEnabled(false);
//添加新的一组DB实体
ccHObject* cloudContainer = new ccHObject(pc->getName() + QString("_saf"));
//设置新点云并添加到实体
rangeAnglepc->setVisible(true);
rangeAnglepc->setName("SAF Point Cloud");
cloudContainer->addChild(rangeAnglepc);
//添加实体到DB树
m_app->addToDB(cloudContainer);
//刷新
m_app->refreshAll();
}
效果
结语
经过了三篇的学习,终于实现了个完整的插件。
回顾我们学习的路线:插件框架 -> 数据结构 -> 算法实现
我们不仅从中学会了CC插件的编写,也学到了QT的pro文件编写、QT界面设计、CC运作流程、点云数据结构等。
而我在学习这个插件编写的过程收获更多,因为我是看代码两个月,写代码两小时,Debug两天(差不多啦不要纠结为什么222)
看代码的过程是非常痛苦的,CC里面大量的模板编程思想,接口设计思想,还有去他继承谁爸爸的爸爸……

但是期间确实学到很多,以此作为分享,望共勉!