python进阶—OpenCV之图像特征检测与描述
文章目录
- Harris角点检测
- Harris角点检测
- Corner with SubPixel Accuracy
- Shi-Tomasi角点检测
- 尺度不变特征变换算法SIFT (Scale-Invariant Feature Transform)
- SURF (Speeded-Up Robust Features)
- FAST Algorithm for Corner Detection
这是官方教程的第四篇,OpenCV之图像特征检测,继续学习opencv。
原教程花了很大篇幅介绍图像的特征是什么含义,如何描述他们,并用“拼图”游戏来解释它们。简单说图像的特征就是一些边边角角、变化非常明显的区域,能在图片中明显定位的元素,然后用一些数据去描述这些特征。
Harris角点检测
Harris角点检测是Chris Harris和Mike Stephens在1988年提出的。主要用于运动图像的追踪。当时的普遍想法是利用边缘进行追踪,但是当相机或物体运动时你不知道朝哪个方向,相机的几何变换也是未知的,所以边缘匹配很难达到预期的效果。即使是当时最优秀的边缘检测算子Canny算子,它的边缘检测也依赖于阈值的选取。所以Harris等人放弃了匹配边缘,转而寻找一些特殊的点来匹配,这些点是边缘线段的连接点,它们表征了图像的结构,代表了图像局部的特征。
Harris角点检测
- 函数原型:dst = cv.cornerHarris( src, blockSize, ksize, k[, dst[, borderType]] )
- src:输入图像,单通道8bit灰度图像或者float32型的图像
- dst:角点检测后图像,图像类型为CV_32FC1,尺寸与原图一致
- blockSize:邻域尺寸大小
- ksize:sobel边缘检测窗口大小
- k:系数值,通常取值范围为0.04 ~ 0.06之间
- borderType:边沿像素推断方法,即边沿类型
import numpy as np
import cv2 as cv
filename = 'chessboard.png'
img = cv.imread(filename)
gray = cv.cvtColor(img,cv.COLOR_BGR2GRAY)
gray = np.float32(gray)
dst = cv.cornerHarris(gray,2,3,0.04)
#result is dilated for marking the corners, not important
dst = cv.dilate(dst,None)
# Threshold for an optimal value, it may vary depending on the image.
img[dst>0.01*dst.max()]=[0,0,255]
cv.imshow('dst',img)
if cv.waitKey(0) & 0xff == 27:
cv.destroyAllWindows()
Corner with SubPixel Accuracy
Harris角点检测存在很多缺陷,如角点是像素级别的,速度较慢,准确度不高等
- 函数原型:corners = cv.cornerSubPix( image, corners, winSize, zeroZone, criteria )
- image:输入图像
- corners:输入的初始角点坐标集合,通常是Harris角点检测的结果,输出时修改为精确检测的检点坐标
- winSize:计算亚像素角点时考虑的区域的大小,大小为NXN; N=(winSize*2+1);For example, if winSize=Size(5,5) , then a 5∗2+1×5∗2+1=11×11 search window is used.
- zeroZone:类似于winSize,搜索窗口中dead region大小的一半,Size(-1,-1)表示忽略,主要用于避免自相关矩阵中可能的奇点(自己翻译,不明所以)
- criteria:评判规则,表示计算亚像素时停止迭代的标准,可选的值有cv::TermCriteria::MAX_ITER 、cv::TermCriteria::EPS(可以是两者其一,或两者均选),前者表示迭代次数达到了最大次数时停止,后者表示角点位置变化的最小值已经达到最小时停止迭代。二者均使用cv::TermCriteria()构造函数进行指定
import numpy as np
import cv2 as cv
filename = 'chessboard2.jpg'
img = cv.imread(filename)
gray = cv.cvtColor(img,cv.COLOR_BGR2GRAY)
# find Harris corners
gray = np.float32(gray)
dst = cv.cornerHarris(gray,2,3,0.04)
dst = cv.dilate(dst,None)
ret, dst = cv.threshold(dst,0.01*dst.max(),255,0)
dst = np.uint8(dst)
# find centroids
ret, labels, stats, centroids = cv.connectedComponentsWithStats(dst)
# define the criteria to stop and refine the corners
criteria = (cv.TERM_CRITERIA_EPS + cv.TERM_CRITERIA_MAX_ITER, 100, 0.001)
corners = cv.cornerSubPix(gray,np.float32(centroids),(5,5),(-1,-1),criteria)
# Now draw them
res = np.hstack((centroids,corners))
res = np.int0(res)
img[res[:,1],res[:,0]]=[0,0,255]
img[res[:,3],res[:,2]] = [0,255,0]
cv.imwrite('subpixel5.png',img)
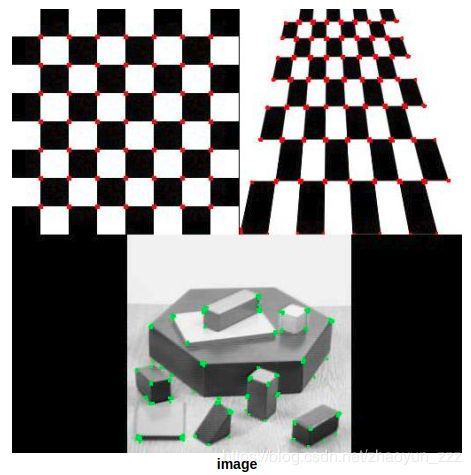
图中红色点表示Harris角点检测的结果,绿色点表示经过SubPixel优化过的角点检测结果。
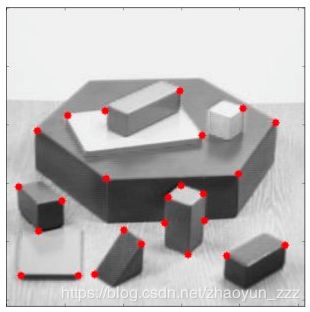
Shi-Tomasi角点检测
Shi-Tomasi 算法是Harris 算法的改进。Harris 算法最原始的定义是将矩阵 M 的行列式值与 M 的迹相减,再将差值同预先给定的阈值进行比较。后来Shi 和Tomasi 提出改进的方法,若两个特征值中较小的一个大于最小阈值,则会得到强角点。
- 函数原型:corners = cv.goodFeaturesToTrack( image, maxCorners, qualityLevel, minDistance[, corners[, mask[, blockSize[, useHarrisDetector[, k]]]]] )
- image:8位或32位单通道灰度图像
- corners:角点向量,保存的是检测到的角点的坐标
- maxCorners:定义可以检测到的角点的数量的最大值,maxCorners <= 0 表示无限制
- qualityLevel:检测到的角点的质量等级,角点特征值小于qualityLevel*最大特征值的点将被舍弃 For example, if the best corner has the quality measure = 1500, and the qualityLevel=0.01 , then all the corners with the quality measure less than 15 are rejected.
- minDistance:两个角点间最小间距,以像素为单位
- mask:感兴趣的角点检测区域,指定角点检测区域,类型为CV_8UC1
- blockSize:计算协方差矩阵时的窗口大小
- useHarrisDetector:是否使用Harris角点检测,为false,则使用Shi-Tomasi算子
- k:Harris角点检测算子用的中间参数,一般取经验值0.04~0.06;useHarrisDetector参数为false时,该参数不起作用
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
img = cv.imread('blox.jpg')
gray = cv.cvtColor(img,cv.COLOR_BGR2GRAY)
corners = cv.goodFeaturesToTrack(gray,25,0.01,10)
corners = np.int0(corners)
for i in corners:
x,y = i.ravel()
cv.circle(img,(x,y),3,255,-1)
plt.imshow(img),plt.show()
尺度不变特征变换算法SIFT (Scale-Invariant Feature Transform)
SIFT算法的特点:
- SIFT特征是图像的局部特征,其对旋转、尺度缩放、亮度变化保持不变性,对视角变化、仿射变换、噪声也保持一定程度的稳定性;
- 独特性(Distinctiveness)好,信息量丰富,适用于在海量特征数据库中进行快速、准确的匹配;
- 多量性,即使少数的几个物体也可以产生大量的SIFT特征向量;
- 高速性,经优化的SIFT匹配算法甚至可以达到实时的要求;
- 可扩展性,可以很方便的与其他形式的特征向量进行联合。
SIFT算法在一定程度上可解决目标的自身状态、场景所处的环境和成像器材的成像特性等因素影响图像配准/目标识别跟踪的性能,主要有以下几点:
- 目标的旋转、缩放、平移
- 图像仿射/投影变换
- 光照影响
- 目标遮挡
- 杂物场景
- 噪声
import numpy as np
import cv2 as cv
img = cv.imread('test.jpg')
gray= cv.cvtColor(img,cv.COLOR_BGR2GRAY)
sift = cv.xfeatures2d.SIFT_create()
kp = sift.detect(gray,None)
img=cv.drawKeypoints(gray,kp,img)
cv.imwrite('sift_keypoints.jpg',img)
- 函数 sift.compute() 用来计算这些关键点的描述符。例如: kp; des = sift:compute(gray; kp)。
- 函数 sift.detectAndCompute()一步到位直接找到关键点并计算出其描述符。
这里需要描述一下函数:cv.drawKeypoints
- outImage = cv.drawKeypoints( image, keypoints, outImage[, color[, flags]] )
- image:查找关键点的图像
- keypoints:在图像中查找到的关键点
- outImage:输出图像,根据flag的取值,会在输出图像画上flag只是的信息
- color:关键点颜色
- flags:在输出图像上描绘关键的标志,取值如下
cv2.DRAW_MATCHES_FLAGS_DEFAULT, cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS, cv2.DRAW_MATCHES_FLAGS_DRAW_OVER_OUTIMG, cv2.DRAW_MATCHES_FLAGS_NOT_DRAW_SINGLE_POINTS
SURF (Speeded-Up Robust Features)
SIFT 算法可以进行关键点检测和描述,但是这种算法的执行速度比较慢。
与 SIFT 相同 OpenCV 也提供了 SURF 的相关函数。首先我们要初始化一个 SURF 对象,同时设置好可选参数: 64/128 维描述符, Upright/Normal 模式等。
>>> img = cv.imread('fly.png',0)
# Create SURF object. You can specify params here or later.
# Here I set Hessian Threshold to 400
>>> surf = cv.xfeatures2d.SURF_create(400)
# Find keypoints and descriptors directly
>>> kp, des = surf.detectAndCompute(img,None)
>>> len(kp)
699
#在一幅图像中显示 699 个关键点太多了,我们把它缩减到 50 个再绘制到图片上。
# Check present Hessian threshold
>>> print( surf.getHessianThreshold() )
400.0
# We set it to some 50000. Remember, it is just for representing in picture.
# In actual cases, it is better to have a value 300-500
>>> surf.setHessianThreshold(50000)
# Again compute keypoints and check its number.
>>> kp, des = surf.detectAndCompute(img,None)
>>> print( len(kp) )
47
>>> img2 = cv.drawKeypoints(img,kp,None,(255,0,0),4)
>>> plt.imshow(img2),plt.show()

# 不检测关键点的方向
# Check upright flag, if it False, set it to True
>>> print( surf.getUpright() )
False
>>> surf.setUpright(True)
# Recompute the feature points and draw it
>>> kp = surf.detect(img,None)
>>> img2 = cv.drawKeypoints(img,kp,None,(255,0,0),4)
>>> plt.imshow(img2),plt.show()
# 关键点描述符的大小,如果是 64 维的就改成 128 维
# Find size of descriptor
>>> print( surf.descriptorSize() )
64
# That means flag, "extended" is False.
>>> surf.getExtended()
False
# So we make it to True to get 128-dim descriptors.
>>> surf.extended = True
>>> kp, des = surf.detectAndCompute(img,None)
>>> print( surf.descriptorSize() )
128
>>> print( des.shape )
(47, 128)

FAST Algorithm for Corner Detection
- cv.FAST_FEATURE_DETECTOR_TYPE_5_8,
- cv.FAST_FEATURE_DETECTOR_TYPE_7_12
- cv.FAST_FEATURE_DETECTOR_TYPE_9_16
以上3个选择是邻域大小的选择
import numpy as np
import cv2 as cv
from matplotlib import pyplot as plt
img = cv.imread('simple.jpg',0)
# Initiate FAST object with default values
fast = cv.FastFeatureDetector_create()
# find and draw the keypoints
kp = fast.detect(img,None)
img2 = cv.drawKeypoints(img, kp, None, color=(255,0,0))
# Print all default params
print( "Threshold: {}".format(fast.getThreshold()) )
print( "nonmaxSuppression:{}".format(fast.getNonmaxSuppression()) )
print( "neighborhood: {}".format(fast.getType()) )
print( "Total Keypoints with nonmaxSuppression: {}".format(len(kp)) )
cv.imwrite('fast_true.png',img2)
# Disable nonmaxSuppression
fast.setNonmaxSuppression(0)
kp = fast.detect(img,None)
print( "Total Keypoints without nonmaxSuppression: {}".format(len(kp)) )
img3 = cv.drawKeypoints(img, kp, None, color=(255,0,0))
cv.imwrite('fast_false.png',img3)
至此,学习遇到瓶颈了,会有一大段时间不会更新OpenCV的内容。