4.Linux系统编程-网络编程-socket
4.Linux系统编程-网络编程-socket
- 套接字socket
- 网络字节序
- IP地址转换函数
- sockaddr数据结构
- 网络套接字函数
- socket模型创建流程图
- socket函数
- bind函数
- listen函数
- accept函数
- connect函数
- C/S模型-TCP
- server
- client
- 出错处理封装函数
- TCP通信时序
- 三次握手
- 四次挥手
- TCP状态转换
- 2MSL
- 端口复用
- TCP异常断开
- 心跳检测机制(心跳包,乒乓包(简单),探测分节)
- 设置TCP属性
- 半关闭
- 高并发服务器
- 多进程并发服务器
- 多线程并发服务器
- 多路I/O转接服务器
- select
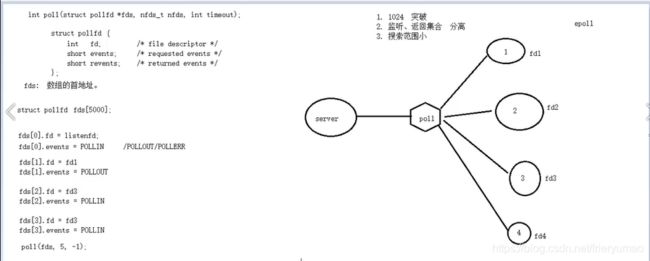
- poll
- epoll
- 基础API
- server
- epoll进阶
- ET模式
- LT模式
- 基于管道epoll ET触发模式
- 基于网络C/S模型的非阻塞模型的epoll ET触发模式
- epoll反应堆型(libevent核心思想实现,跨平台)
- 线程池并发服务器
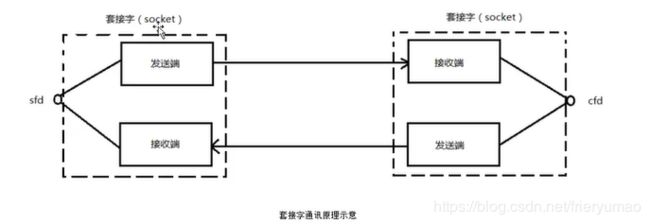
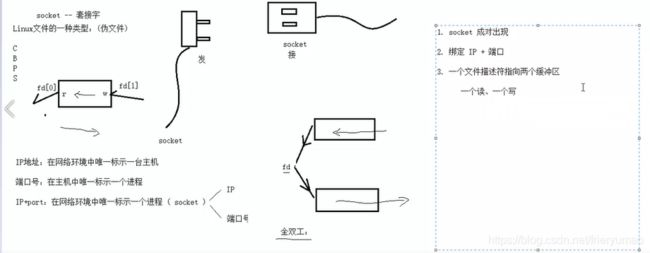
套接字socket
IP地址:在网络环境中唯一标识一台主机
端口号:在主机中唯一标识一个进程
IP+port:在网络环境中唯一标识一个进程(socket)
网络字节序
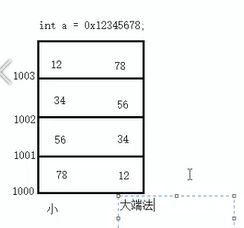
TCP/IP协议规定:网络数据流应采用大端字节序。
大端:低地址->高位(高地址->低位)
小端:高地址->高位(高地址->高位)
为使网络程序具有可移植性,使同样的C代码在大端和小端计算机上编译后都能正常运行,可以调用以下库函数做网络字节序和主机字节序的转换。
#include h表示host,n表示network,l表示32位长整数,s表示16位短整数。
如果主机是小端字节序,这些函数将参数做相应的大小端转换然后返回,如果主机是大端字节序,这些函数不做转换,将参数原封不动地返回。
IP地址转换函数
早期:
#include 现在:
#include 
inet_pton参数:
af:AF_INET,AF_INET6
src:传入参数->IP地址
dst:传出参数->网络地址
sockaddr数据结构
strcut sockaddr 很多网络编程函数诞生早于IPv4协议,那时候都使用的是sockaddr结构体,为了向前兼容,现在sockaddr退化成了(void *)的作用,传递一个地址给函数,至于这个函数是sockaddr_in还是sockaddr_in6,由地址族确定,然后函数内部再强制类型转化为所需的地址类型。
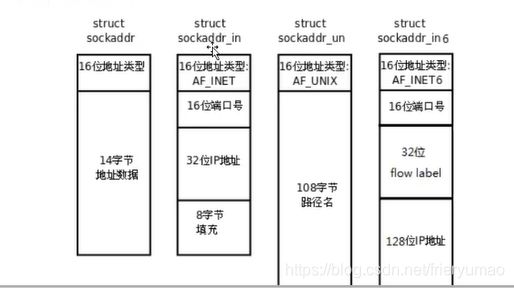
struct sockaddr {
sa_family_t sa_family; /* address family, AF_xxx */
char sa_data[14]; /* 14 bytes of protocol address */
};
struct sockaddr_in {
sa_family_t sin_family; /* Address family */ 地址结构类型
in_port_t sin_port; /* Port number */ 端口号
struct in_addr sin_addr; /* Internet address */ IP地址
};
sturct in_addr{
uint32_t s_addr;
}
使用 sudo grep -r “struct sockaddr_in {” /usr 命令可查看到struct sockaddr_in结构体的定义。一般其默认的存储位置:/usr/include/linux/in.h 文件中。
struct sockaddr_in addr;
addr.sin_fanliy= AF_INET/AF_INET6;
addr.sin_port=htons/ntohs;
addr.sin_addr.s_addr = htonl;ntosl;inet_pton inet_ntop;
bind(listen_fd, (struct sockaddr *)&addr, sizeof(servaddr)); /* initialize servaddr */
网络套接字函数
socket模型创建流程图
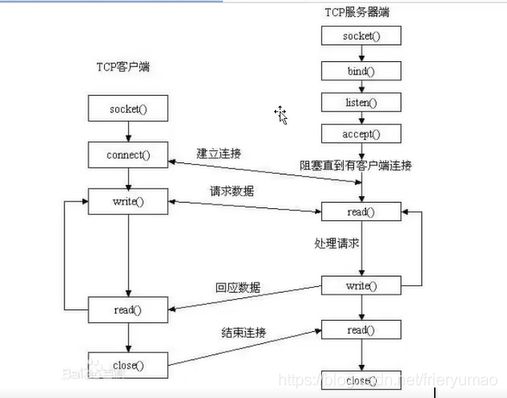
socket函数
#include bind函数
#include listen函数
用来指定监听上限数
#include 查看系统默认backlog
cat /proc/sys/net/ipv4/tcp_max_syn_backlog
accept函数
#include 三方握手完成后,服务器调用accept()接受连接,如果服务器调用accept()时还没有客户端的连接请求,就阻塞等待直到有客户端连接上来。addr是一个传出参数,accept()返回时传出客户端的地址和端口号。addrlen参数是一个传入传出参数(value-result argument),传入的是调用者提供的缓冲区addr的长度以避免缓冲区溢出问题,传出的是客户端地址结构体的实际长度(有可能没有占满调用者提供的缓冲区)。如果给addr参数传NULL,表示不关心客户端的地址。
我们的服务器程序结构是这样的:
while (1) {
cliaddr_len = sizeof(cliaddr);
connfd = accept(listenfd, (struct sockaddr *)&cliaddr, &cliaddr_len);
n = read(connfd, buf, MAXLINE);
......
close(connfd);
}
connect函数
#include 客户端需要调用connect()连接服务器,connect和bind的参数形式一致,区别在于bind的参数是自己的地址,而connect的参数是对方的地址。connect()成功返回0,出错返回-1
C/S模型-TCP
server
#include client
#include 由于客户端不需要固定的端口号,因此不必调用bind(),客户端的端口号由内核自动分配。注意,客户端不是不允许调用bind(),只是没有必要调用bind()固定一个端口号,服务器也不是必须调用bind(),但如果服务器不调用bind(),内核会自动给服务器分配监听端口,每次启动服务器时端口号都不一样,客户端要连接服务器就会遇到麻烦。
客户端和服务器启动后可以使用netstat命令查看链接情况:
netstat -apn|grep 6666
出错处理封装函数
上面的例子不仅功能简单,而且简单到几乎没有什么错误处理,我们知道,系统调用不能保证每次都成功,必须进行出错处理,这样一方面可以保证程序逻辑正常,另一方面可以迅速得到故障信息。
为使错误处理的代码不影响主程序的可读性,我们把与socket相关的一些系统函数加上错误处理代码包装成新的函数,做成一个模块wrap.c:
#include wrap.h
#ifndef __WRAP_H_
#define __WRAP_H_
void perr_exit(const char *s);
int Accept(int fd, struct sockaddr *sa, socklen_t *salenptr);
int Bind(int fd, const struct sockaddr *sa, socklen_t salen);
int Connect(int fd, const struct sockaddr *sa, socklen_t salen);
int Listen(int fd, int backlog);
int Socket(int family, int type, int protocol);
ssize_t Read(int fd, void *ptr, size_t nbytes);
ssize_t Write(int fd, const void *ptr, size_t nbytes);
int Close(int fd);
ssize_t Readn(int fd, void *vptr, size_t n);
ssize_t Writen(int fd, const void *vptr, size_t n);
ssize_t my_read(int fd, char *ptr);
ssize_t Readline(int fd, void *vptr, size_t maxlen);
#endif
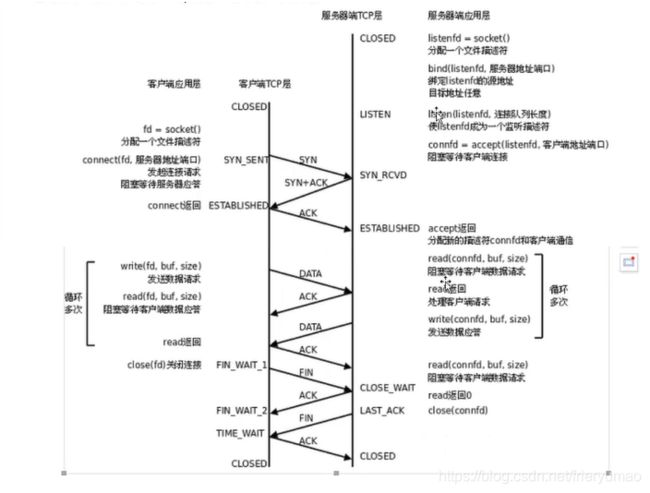
TCP通信时序
三次握手

四次挥手

TCP状态转换
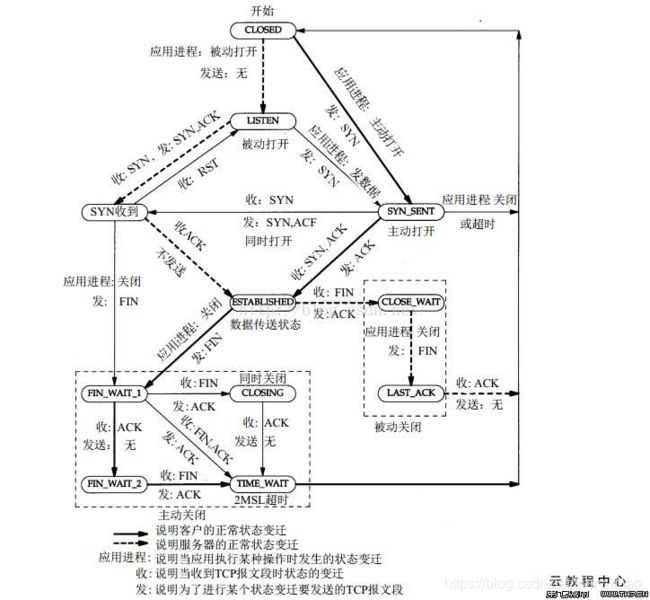

CLOSED:表示初始状态。
LISTEN:该状态表示服务器端的某个SOCKET处于监听状态,可以接受连接。
SYN_SENT:这个状态与SYN_RCVD遥相呼应,当客户端SOCKET执行CONNECT连接时,它首先发送SYN报文,随即进入到了SYN_SENT状态,并等待服务端的发送三次握手中的第2个报文。SYN_SENT状态表示客户端已发送SYN报文。
SYN_RCVD: 该状态表示接收到SYN报文,在正常情况下,这个状态是服务器端的SOCKET在建立TCP连接时的三次握手会话过程中的一个中间状态,很短暂。此种状态时,当收到客户端的ACK报文后,会进入到ESTABLISHED状态。
ESTABLISHED:表示连接已经建立。
FIN_WAIT_1: FIN_WAIT_1和FIN_WAIT_2状态的真正含义都是表示等待对方的FIN报文。区别是:
FIN_WAIT_1状态是当socket在ESTABLISHED状态时,想主动关闭连接,向对方发送了FIN报文,此时该socket进入到FIN_WAIT_1状态。
FIN_WAIT_2状态是当对方回应ACK后,该socket进入到FIN_WAIT_2状态,正常情况下,对方应马上回应ACK报文,所以FIN_WAIT_1状态一般较难见到,而FIN_WAIT_2状态可用netstat看到。
FIN_WAIT_2:主动关闭链接的一方,发出FIN收到ACK以后进入该状态。称之为半连接或半关闭状态。该状态下的socket只能接收数据,不能发
TIME_WAIT: 表示收到了对方的FIN报文,并发送出了ACK报文,等2MSL后即可回到CLOSED可用状态。如果FIN_WAIT_1状态下,收到对方同时带 FIN标志和ACK标志的报文时,可以直接进入到TIME_WAIT状态,而无须经过FIN_WAIT_2状态
CLOSING: 这种状态较特殊,属于一种较罕见的状态。正常情况下,当你发送FIN报文后,按理来说是应该先收到(或同时收到)对方的 ACK报文,再收到对方的FIN报文。但是CLOSING状态表示你发送FIN报文后,并没有收到对方的ACK报文,反而却也收到了对方的FIN报文。什么情况下会出现此种情况呢?如果双方几乎在同时close一个SOCKET的话,那么就出现了双方同时发送FIN报文的情况,也即会出现CLOSING状态,表示双方都正在关闭SOCKET连接
CLOSE_WAIT: 此种状态表示在等待关闭。当对方关闭一个SOCKET后发送FIN报文给自己,系统会回应一个ACK报文给对方,此时则进入到CLOSE_WAIT状态。接下来呢,察看是否还有数据发送给对方,如果没有可以 close这个SOCKET,发送FIN报文给对方,即关闭连接。所以在CLOSE_WAIT状态下,需要关闭连接。
LAST_ACK: 该状态是被动关闭一方在发送FIN报文后,最后等待对方的ACK报文。当收到ACK报文后,即可以进入到CLOSED可用状态。
2MSL
2MSL (Maximum Segment Lifetime) TIME_WAIT状态的存在有两个理由:
(1)让4次握手关闭流程更加可靠;4次握手的最后一个ACK是是由主动关闭方发送出去的,若这个ACK丢失,被动关闭方会再次发一个FIN过来。若主动关闭方能够保持一个2MSL的TIME_WAIT状态,则有更大的机会让丢失的ACK被再次发送出去。
(2)防止lost duplicate对后续新建正常链接的传输造成破坏。lost uplicate在实际的网络中非常常见,经常是由于路由器产生故障,路径无法收敛,导致一个packet在路由器A,B,C之间做类似死循环的跳转。IP头部有个TTL,限制了一个包在网络中的最大跳数,因此这个包有两种命运,要么最后TTL变为0,在网络中消失;要么TTL在变为0之前路由器路径收敛,它凭借剩余的TTL跳数终于到达目的地。但非常可惜的是TCP通过超时重传机制在早些时候发送了一个跟它一模一样的包,并先于它达到了目的地,因此它的命运也就注定被TCP协议栈抛弃。
另外一个概念叫做incarnation connection,指跟上次的socket pair一摸一样的新连接,叫做incarnation of previous connection。lost uplicate加上incarnation connection,则会对我们的传输造成致命的错误。
TCP是流式的,所有包到达的顺序是不一致的,依靠序列号由TCP协议栈做顺序的拼接;假设一个incarnation connection这时收到的seq=1000, 来了一个lost duplicate为seq=1000,len=1000, 则TCP认为这个lost duplicate合法,并存放入了receive buffer,导致传输出现错误。通过一个2MSL TIME_WAIT状态,确保所有的lost duplicate都会消失掉,避免对新连接造成错误。
该状态为什么设计在主动关闭这一方:
(1)发最后ACK的是主动关闭一方。
(2)只要有一方保持TIME_WAIT状态,就能起到避免incarnation connection在2MSL内的重新建立,不需要两方都有。
如何正确对待2MSL TIME_WAIT?
RFC要求socket pair在处于TIME_WAIT时,不能再起一个incarnation connection。但绝大部分TCP实现,强加了更为严格的限制。在2MSL等待期间,socket中使用的本地端口在默认情况下不能再被使用。
端口复用
在server的TCP连接没有完全断开之前不允许重新监听是不合理的。因为,TCP连接没有完全断开指的是connfd(127.0.0.1:6666)没有完全断开,而我们重新监听的是lis-tenfd(0.0.0.0:6666),虽然是占用同一个端口,但IP地址不同,connfd对应的是与某个客户端通讯的一个具体的IP地址,而listenfd对应的是wildcard address。解决这个问题的方法是使用setsockopt()设置socket描述符的选项SO_REUSEADDR为1,表示允许创建端口号相同但IP地址不同的多个socket描述符。
在server代码的socket()和bind()调用之间插入如下代码:
int opt = 1;
setsockopt(listenfd, SOL_SOCKET, SO_REUSEADDR, &opt, sizeof(opt));
TCP异常断开
心跳检测机制(心跳包,乒乓包(简单),探测分节)
Heart-Beat线程
这个是最常用的简单方法。在接收和发送数据时个人设计一个守护进程(线程),定时发送Heart-Beat包,客户端/服务器收到该小包后,立刻返回相应的包即可检测对方是否实时在线。
该方法的好处是通用,但缺点就是会改变现有的通讯协议!大家一般都是使用业务层心跳来处理,主要是灵活可控。
UNIX网络编程不推荐使用SO_KEEPALIVE来做心跳检测,还是在业务层以心跳包做检测比较好,也方便控制。
设置TCP属性
SO_KEEPALIVE 保持连接检测对方主机是否崩溃,避免(服务器)永远阻塞于TCP连接的输入。设置该选项后,如果2小时内在此套接口的任一方向都没有数据交换,TCP就自动给对方发一个保持存活探测分节(keepalive probe)。这是一个对方必须响应的TCP分节.它会导致以下三种情况:对方接收一切正常:以期望的ACK响应。2小时后,TCP将发出另一个探测分节。对方已崩溃且已重新启动:以RST响应。套接口的待处理错误被置为ECONNRESET,套接 口本身则被关闭。对方无任何响应:源自berkeley的TCP发送另外8个探测分节,相隔75秒一个,试图得到一个响应。在发出第一个探测分节11分钟 15秒后若仍无响应就放弃。套接口的待处理错误被置为ETIMEOUT,套接口本身则被关闭。如ICMP错误是“host unreachable(主机不可达)”,说明对方主机并没有崩溃,但是不可达,这种情况下待处理错误被置为EHOSTUNREACH。
根据上面的介绍我们可以知道对端以一种非优雅的方式断开连接的时候,我们可以设置SO_KEEPALIVE属性使得我们在2小时以后发现对方的TCP连接是否依然存在。
keepAlive = 1;
setsockopt(listenfd, SOL_SOCKET, SO_KEEPALIVE, (void*)&keepAlive, sizeof(keepAlive));
如果我们不能接受如此之长的等待时间,从TCP-Keepalive-HOWTO上可以知道一共有两种方式可以设置,一种是修改内核关于网络方面的 配置参数,另外一种就是SOL_TCP字段的TCP_KEEPIDLE, TCP_KEEPINTVL, TCP_KEEPCNT三个选项。
半关闭
当TCP链接中A发送FIN请求关闭,B端回应ACK后(A端进入FIN_WAIT_2状态),B没有立即发送FIN给A时,A方处在半链接状态,此时A可以接收B发送的数据,但是A已不能再向B发送数据。
从程序的角度,可以使用API来控制实现半连接状态。
#include 使用close中止一个连接,但它只是减少描述符的引用计数,并不直接关闭连接,只有当描述符的引用计数为0时才关闭连接。
shutdown不考虑描述符的引用计数,直接关闭描述符。也可选择中止一个方向的连接,只中止读或只中止写。
注意:
1、如果有多个进程共享一个套接字,close每被调用一次,计数减1,直到计数为0时,也就是所用进程都调用了close,套接字将被释放。
2、在多进程中如果一个进程调用了shutdown(sfd, SHUT_RDWR)后,其它的进程将无法进行通信。但,如果一个进程close(sfd)将不会影响到其它进程。
高并发服务器
多进程并发服务器
使用多进程并发服务器时要考虑以下几点:
1、父进程最大文件描述个数(父进程中需要close关闭accept返回的新文件描述符)
2、系统内创建进程个数(与内存大小相关)
3、进程创建过多是否降低整体服务性能(进程调度)
/* server.c */
#include client
/* client.c */
#include 多线程并发服务器
在使用线程模型开发服务器时需考虑以下问题:
1、调整进程内最大文件描述符上限
2、线程如有共享数据,考虑线程同步
3、服务于客户端线程退出时,退出处理。(退出值,分离态)
4、系统负载,随着链接客户端增加,导致其它线程不能及时得到CPU
server
/* server.c */
#include 多路I/O转接服务器
多路IO转接服务器也叫做多任务IO服务器。该类服务器实现的主旨思想是,不再由应用程序自己监视客户端连接,取而代之由内核替应用程序监视文件。
select
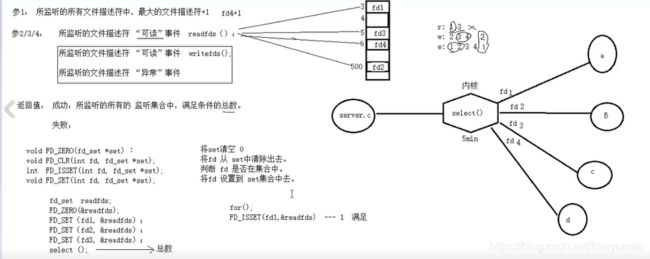
1、select能监听的文件描述符个数受限于FD_SETSIZE,一般为1024,单纯改变进程打开的文件描述符个数并不能改变select监听文件个数
2、解决1024以下客户端时使用select是很合适的,但如果链接客户端过多,select采用的是轮询模型,会大大降低服务器响应效率,不应在select上投入更多精力
#include 
server
#includepoll
#include /* server.c */
#include epoll

epoll是Linux下多路复用IO接口select/poll的增强版本,它能显著提高程序在大量并发连接中只有少量活跃的情况下的系统CPU利用率,因为它会复用文件描述符集合来传递结果而不用迫使开发者每次等待事件之前都必须重新准备要被侦听的文件描述符集合,另一点原因就是获取事件的时候,它无须遍历整个被侦听的描述符集,只要遍历那些被内核IO事件异步唤醒而加入Ready队列的描述符集合就行了。
目前epell是linux大规模并发网络程序中的热门首选模型。
epoll除了提供select/poll那种IO事件的电平触发(Level Triggered)外,还提供了边沿触发(Edge Triggered),这就使得用户空间程序有可能缓存IO状态,减少epoll_wait/epoll_pwait的调用,提高应用程序效率。
查看进程可以打开的socket描述符上限
cat /proc/sys/fs/file-max
修改配置文件方式修改上限
sudo vi /etc/security/limits.conf
在文件尾部写入一下配置,soft软限制,hard硬限制:
* soft nofile 65536
* hard nofile 100000
完成后注销用户或者重启生效
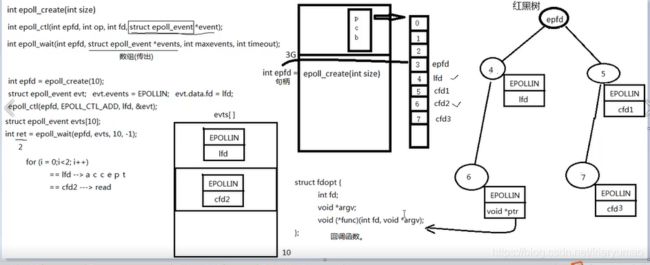
基础API
1、创建一个epoll句柄,参数size用来告诉内核监听的文件描述符的个数,跟内存大小有关
#include 2、控制某个epoll监控的文件描述符上的事件:注册、修改、删除。
#include 3、等待所监控文件描述符上有事件的产生,类似于select()调用。
#include server
#include epoll进阶
事件模型
EPOLL事件有两种模型:
Edge Triggered (ET) 边缘触发只有数据到来才触发,不管缓存区中是否还有数据。
Level Triggered (LT) 水平触发只要有数据都会触发。
思考如下步骤:
1.假定我们已经把一个用来从管道中读取数据的文件描述符(RFD)添加到epoll描述符。
2.管道的另一端写入了2KB的数据
3.调用epoll_wait,并且它会返回RFD,说明它已经准备好读取操作
4.读取1KB的数据
5.调用epoll_wait……
在这个过程中,有两种工作模式:
ET模式
ET模式即Edge Triggered工作模式。
如果我们在第1步将RFD添加到epoll描述符的时候使用了EPOLLET标志,那么在第5步调用epoll_wait之后将有可能会挂起,因为剩余的数据还存在于文件的输入缓冲区内,而且数据发出端还在等待一个针对已经发出数据的反馈信息。只有在监视的文件句柄上发生了某个事件的时候 ET 工作模式才会汇报事件。因此在第5步的时候,调用者可能会放弃等待仍在存在于文件输入缓冲区内的剩余数据。epoll工作在ET模式的时候,必须使用非阻塞套接口,以避免由于一个文件句柄的阻塞读/阻塞写操作把处理多个文件描述符的任务饿死。最好以下面的方式调用ET模式的epoll接口,在后面会介绍避免可能的缺陷。
1)基于非阻塞文件句柄
2)只有当read或者write返回EAGAIN(非阻塞读,暂时无数据)时才需要挂起、等待。但这并不是说每次read时都需要循环读,直到读到产生一个EAGAIN才认为此次事件处理完成,当read返回的读到的数据长度小于请求的数据长度时,就可以确定此时缓冲中已没有数据了,也就可以认为此事读事件已处理完成。
fcntl open setsockopt
LT模式
LT模式即Level Triggered工作模式。
与ET模式不同的是,以LT方式调用epoll接口的时候,它就相当于一个速度比较快的poll,无论后面的数据是否被使用。
LT(level triggered):LT是缺省的工作方式,并且同时支持block和no-block socket。在这种做法中,内核告诉你一个文件描述符是否就绪了,然后你可以对这个就绪的fd进行IO操作。如果你不作任何操作,内核还是会继续通知你的,所以,这种模式编程出错误可能性要小一点。传统的select/poll都是这种模型的代表。
ET(edge-triggered):ET是高速工作方式,只支持no-block socket。在这种模式下,当描述符从未就绪变为就绪时,内核通过epoll告诉你。然后它会假设你知道文件描述符已经就绪,并且不会再为那个文件描述符发送更多的就绪通知。请注意,如果一直不对这个fd作IO操作(从而导致它再次变成未就绪),内核不会发送更多的通知(only once).
基于管道epoll ET触发模式
#include 基于网络C/S模型的非阻塞模型的epoll ET触发模式
只监听了客户端
/* server.c */
#include epoll反应堆型(libevent核心思想实现,跨平台)
1 epoll-----服务器—监听—fd----可读—epoll返回—read—小写转大写—write----epoll继续监听
2 epoll反应堆:
1)epoll—服务器----监听—cfd—可读—epoll返回—read—cfd从树上摘下—重新设置监听cfd写事件,操作—小写转大写—等待epoll_wait返回 -----回写客户端-------cfd从树上摘下—重新设置监听cfd读事件,操作----epoll继续监听
2)evt[i].events=EPOLLIN,evt[i].data ==cfd *ptr struct{int fd,void(fun)(voidarg)}
sturct myevent_s{
int fd;//要监听的文件描述符
int events;//对应监听事件
void *arg;//泛型参数
void(*call_back)(ind fd,int events,void *arg);//回调函数
int status;//是否在监听:1->在红黑树上(监听),0->不在(不监听)
char buf[BUFLEN];//
int len;
long last_active;//记录每次加入红黑树g_efd的时间值
}

/*
* epoll_loop.c
*
* Created on: 2019年11月25日
* Author: wlj
*/
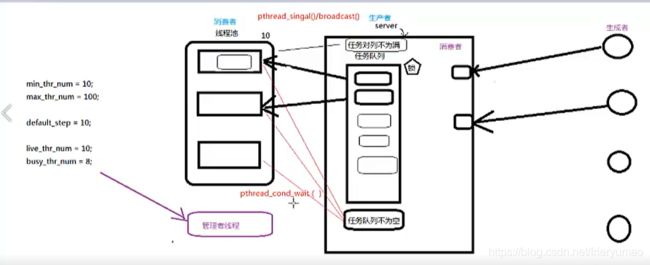
#include线程池并发服务器
/*
* threadpool.c
*
* Created on: 2019年11月27日
* Author: wlj
*/
#include