TM4C123G学习记录(5)--PWM输出
- 为了准备电赛临时学一下TM4C123G,简单记录学习内容
- 大家可以在这里下载我收集的资源,非常全面,花了很大功夫收集来的,还有书籍、例程代码等
- 还可以在TI官网下载相关文档TI官网
一、实验简介
GPIO输出pwm信号,控制板载LED实现呼吸灯效果
二、硬件连接
检查板载LED部分原理图
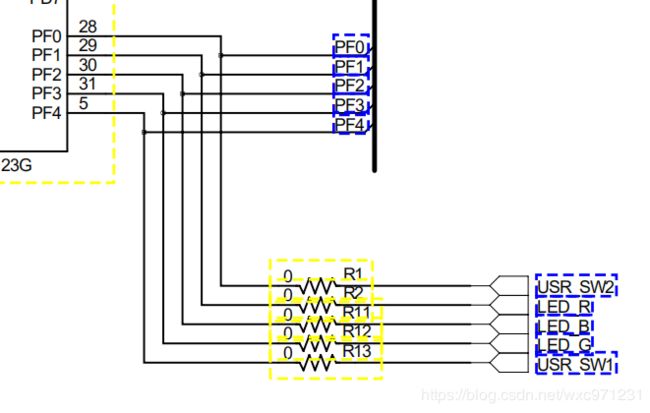
可见PF1/PF2/PF3对应三个LED,LED由三极管开关电路控制,IO输出高电平点亮,IO输出pwm波可以控制亮度
三、TM4C单片机的PWM介绍
(1)pwm资源
TM4C123GH6PM控制器包含两个pwm模块,每个模块由4个pwm发生器和一个控制模块组成,每个发生器可以产生2个pwm信号,一共可以输出16个pwm信号(同一发生器产生的两个信号的周期是一致的,但占空比可以设为不同的)
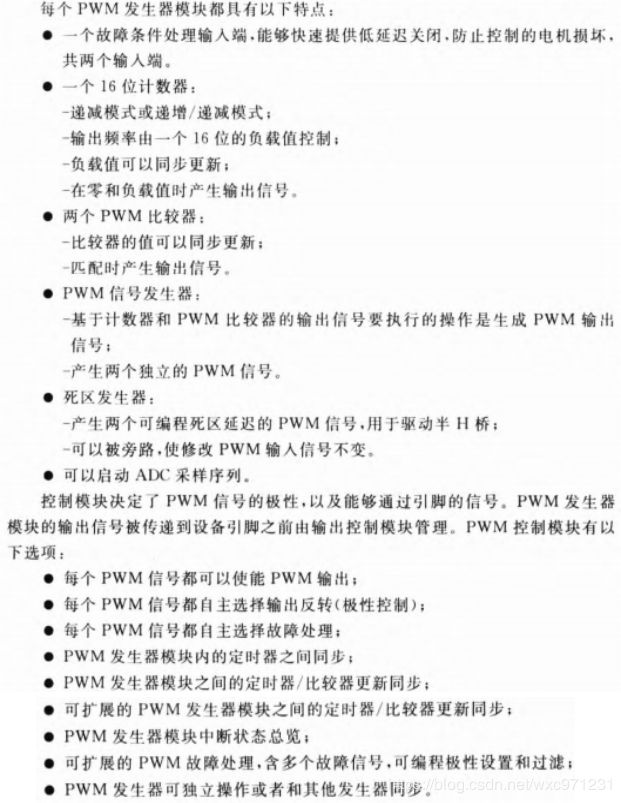
(2)pwm发生器特点
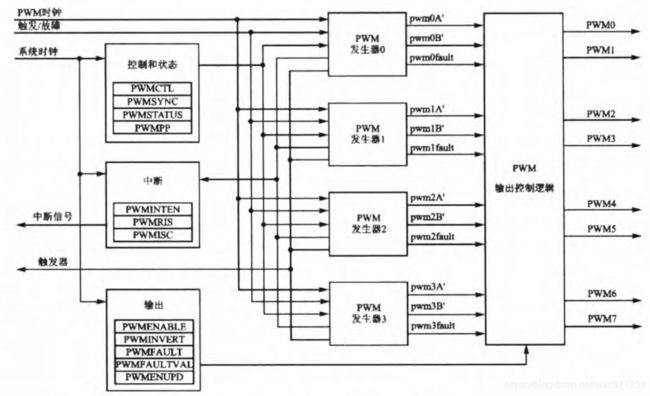
(3)结构图
- pwm模块结构图
- 其中一个发生器的细节

(4)pwm信号引脚映射情况
这个表格十分重要,它记录了在硬件层面上,哪些pwm信号输出连接到哪些引脚,编程时需要对照查看
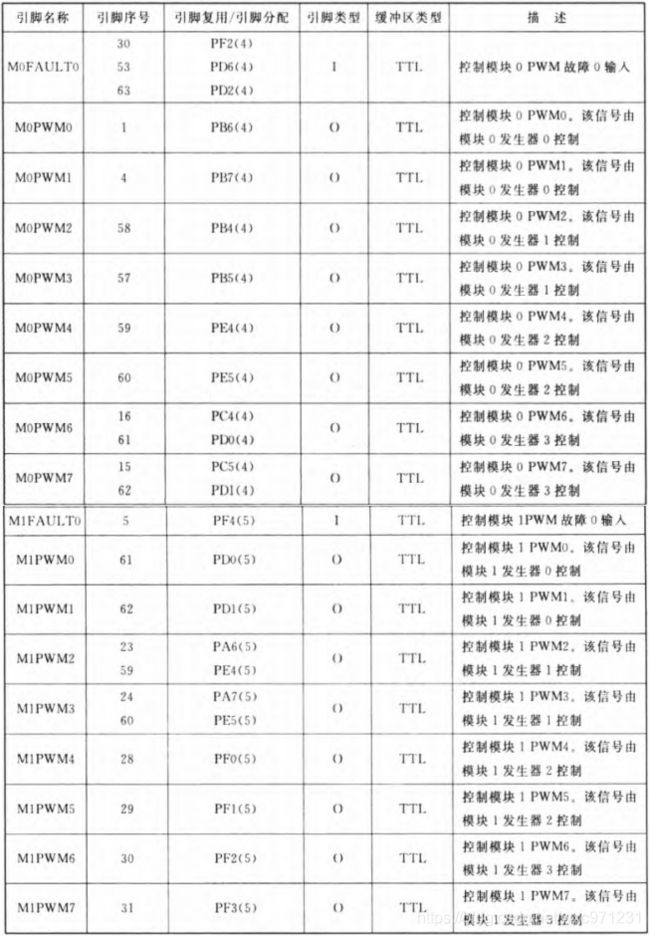
如图可见,PF2连接到M1PWM6,PF3连接到M1PWM7,我们只需控制M1PWM6/M1PWM7在PF2/PF3上输出pwm波,即可控制引脚上连接的LED
(5)pwm模块时钟来源

查看原理图,可见pwm模块时钟来源于经过USEPWMDIV分频的系统时钟,所有pwm信号的时钟频率都是这个。
(6)pwm信号产生过程
(1)类似stm32,TM4C的pwm利用定时器实现(不过TM4C的pwm模块中有自带的定时器,不需要想stm32那样使用timer外设),可以选择三种计数模式
- 向上计数(pwm信号右对齐)
- 向下计数(pwm信号左对齐)
- 上下计数(pwm信号中间对齐)
(2)每个pwm信号发生器,可以配置两个pwm比较器(类似stm32中的ccrx),比较器根据设定的比较值和当前计数值输出高电平脉冲
(3)所有计数器、比较器的信息会被pwm信号发生器检测,并生成对应的pwm波
(7)其它
关于pwm中断、死区配置、信号同步、故障等内容,因为本人没有深入研究,在此不提了,不好意思
四、TM4C单片机的PWM配置过程
- 配置一个PWM发生器,频率25KHz,信号0(MnPWM0)占空比25%,信号1(MnPWM1)占空比75%,假定系统时钟频率为20M
-
使能PWM时钟
SysCtlPeripheralEnable() -
使能被复用引脚的时钟
SysCtlPeripheralEnable() -
使能引脚复用PWM功能
GPIOPinTypePWM() -
将PWM信号分配到合适的引脚上
GPIOPinConfigure() -
使能PWM时钟,设置PWM分频器为2分频(PWM时钟源为10M)
SysCtlPWMClockSet(); -
配置为向下计数,参数立即更新模式
PWMGenConfigure() -
设置周期时间(定时器计数范围),目标频率25K,PWM频率10M,则每一个信号周期有400个PWM周期,故装载值设为400-1(0到399共400个值)
PWMGenPeriodSet() -
设置信号0占空比25%,信号1占空比75%
PWMPulseWidthSet() -
启动PWM发生器的定时器
PWMGenEnable() -
使能PWM输出
PWMOutputState()
五、示例代码
#include